 BEVSegFormer創造了新的BEV分割SOTA
BEVSegFormer創造了新的BEV分割SOTA
對自動駕駛而言,BEV(鳥瞰圖)下的語義分割是一項重要任務。盡管這項工作已經吸引了大量的研究,但靈活處理自動駕駛車輛上的任意相機配置(單個或多個攝像頭),仍然是一項挑戰。
為此,Nullmax的感知團隊提出了BEVSegFormer,這一基于Transformer的BEV語義分割方法,可面向任意配置的相機進行BEV語義分割。
這項研究的題目為《BEVSegFormer: Bird's Eye View Semantic Segmentation From Arbitrary Camera Rigs》,論文鏈接:https://arxiv.org/abs/2203.04050。
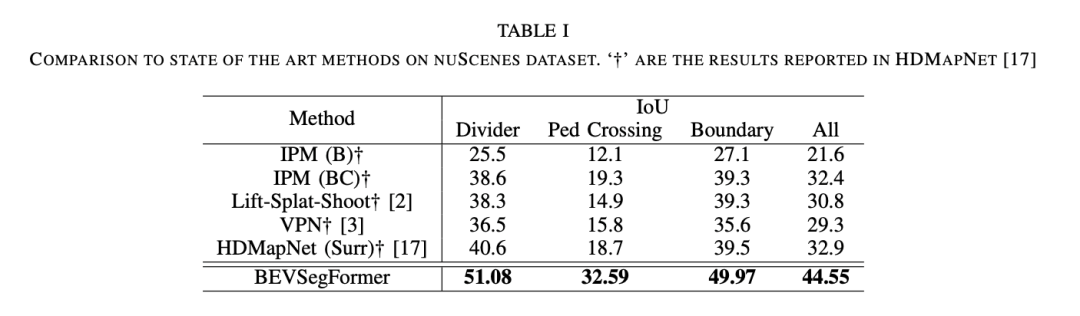
為了評估這一算法的效果,Nullmax在nuScenes公開數據集以及Nullmax的自采數據集上進行了驗證。實驗結果表明,BEVSegFormer對任意相機配置的BEV語義分割,具有出色的性能表現。并且在nuScenes驗證集上,BEVSegFormer創造了新的BEV分割SOTA。
在接下來的工作中,我們還計劃針對自動駕駛以及BEV語義分割的一些其他挑戰,展開進一步的研究。
歡迎對計算機視覺及自動駕駛感知感興趣的小伙伴加入我們,一起探索!
01
關于BEVSegFormer
在自動駕駛或者機器人導航系統中,以BEV形式對感知信息進行表征,具有至關重要的作用,因為它可以為規劃和控制提供諸多的便利。
比如,在無地圖導航方案中,構建本地BEV地圖,不僅成為了高精地圖外的另一種選擇,并且對于包括智體行為預測以及運動規劃等感知系統下游任務而言,也非常重要。而利用相機的輸入進行BEV語義分割,通常被視為構建本地BEV地圖的第一步。
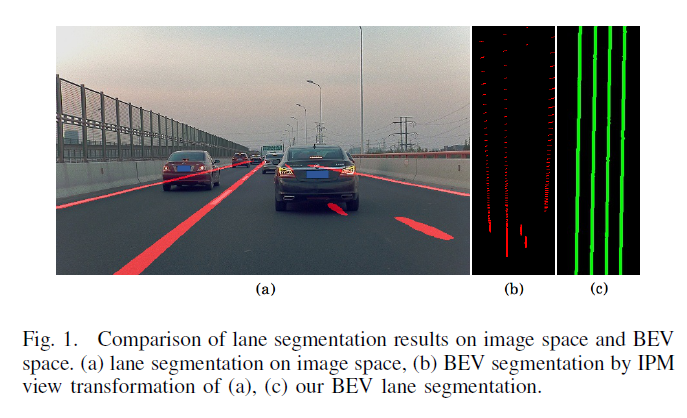
為此,傳統方法一般會先在圖像空間生成分割結果,然后通過逆透視變換(IPM)函數轉換到BEV空間。雖然這是一種連接圖像空間和BEV空間的簡單直接的方法,但它需要準確的相機內外參,或者實時的相機位姿估計。所以,視圖變換的實際效果有可能比較差。
以車道線分割為例,在一些挑戰性場景中,比如遮擋或者遠處區域,使用IPM的傳統方法提供的結果就不夠準確,如圖所示。
近年來,深度學習方法已被研究用于BEV語義分割。Lift-Splat-Shoot通過逐像素深度估計結果完成了從圖像視圖到BEV的視圖變換。不過使用深度估計,也增加了視圖變換過程的復雜度。此外,有一些方法應用MLP或者FC算子來進行視圖變換。這些固定的視圖變換方法,學習圖像空間和BEV空間之間的固定映射,因此不依賴于輸入的數據。
而基于Transformer的方法,是在BEV空間下進行感知的另一個研究方向。在目標檢測任務中,DETR3D引入了一種3D邊界框檢測方法,直接從多個相機圖像的2D特征生成3D空間中的預測。3D空間和2D圖像空間之間的視圖變換,通過交叉注意模塊的3D到2D查詢來實現。
受此啟發,我們提出了BEVSegFormer,通過在Transformer中使用交叉注意機制進行BEV到圖像的查詢,來計算視圖變換。
BEVSegFormer由3個主要的組件組成:
共享的主干網絡,用于提取任意相機的特征圖;
Transformer編碼器,通過自注意模塊嵌入特征圖;
BEV Transformer解碼器,通過交叉注意機制處理BEV查詢,輸出最終的BEV語義分割結果。
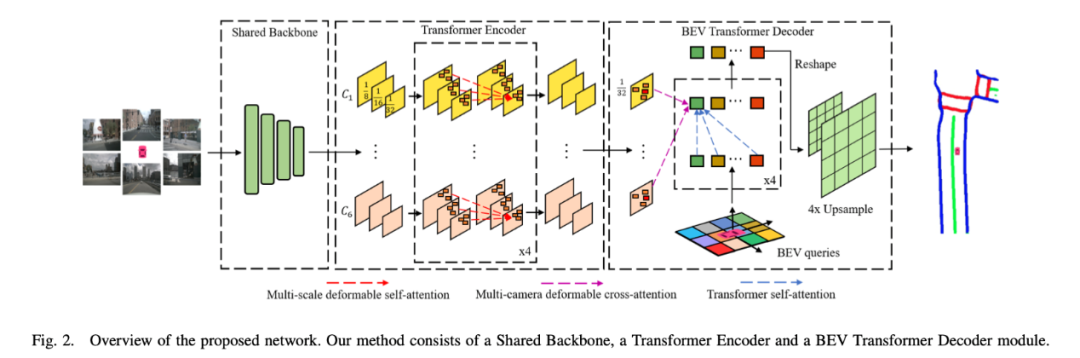
具體來說,BEVSegFormer首先是使用了共享的主干網絡,對來自任意相機的圖像特征進行編碼,然后通過基于可變形Transformer的編碼器對這些特征進行增強。
除此之外,BEVSegFormer還引入了一個BEV Transformer解碼器模塊,對BEV語義分割的結果進行解析,以及一種高效的多相機可變形注意單元,完成BEV到圖像的視圖變換。
最后,根據BEV中的網格布局對查詢進行重塑,并進行上采樣,以有監督的方式生成語義分割結果。
我們分別在nuScenes公開數據集以及Nullmax的自采數據集上,檢驗了BEVSegFormer的算法效果。實驗結果表明,BEVSegFormer在nuScenes驗證集上創造了新的BEV分割SOTA。通過消融實驗,當中每個組件的效果也得到了驗證。
02
加入我們
在這項研究中,我們為了應對自動駕駛車輛上任意相機配置的BEV語義分割挑戰,提出了BEVSegFormer。
接下來,我們還計劃在自動駕駛當中,基于Transformer探索內存效率更高、解釋性更強的BEV語義分割方法。
歡迎對BEV、Transformer在自動駕駛中的感知任務感興趣,以及希望從事于計算機視覺和自動駕駛感知研發的同學,加入Nullmax感知團隊。
在這里,你可以直接參與到大量自動駕駛量產項目的落地,以及最前沿技術的預研當中,為你的idea和技術找到一個充分施展的舞臺!
審核編輯 :李倩
-
自動駕駛
+關注
關注
788文章
14252瀏覽量
170038 -
深度學習
+關注
關注
73文章
5557瀏覽量
122602
原文標題:當BEV語義分割遇上了Transformer,故事的結局是新的SOTA
文章出處:【微信號:Nullmax,微信公眾號:Nullmax紐勱】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
淺析4D-bev標注技術在自動駕駛領域的重要性
康謀方案 | BEV感知技術:多相機數據采集與高精度時間同步方案
Mamba入局圖像復原,達成新SOTA

淺析基于自動駕駛的4D-bev標注技術

自動駕駛中一直說的BEV+Transformer到底是個啥?

語義分割25種損失函數綜述和展望






 工商網監
工商網監
評論