") 適用于ADAS和自動(dòng)駕駛系統(tǒng)的高可靠性和高性能深度學(xué)習(xí)加速器
適用于ADAS和自動(dòng)駕駛系統(tǒng)的高可靠性和高性能深度學(xué)習(xí)加速器

下一代 ADAS 和自動(dòng)駕駛 (AD) 系統(tǒng)部署到市場(chǎng)后,將需要準(zhǔn)確、高速的識(shí)別、判斷和操作。卷積神經(jīng)網(wǎng)絡(luò) (CNN) 需要大量計(jì)算來(lái)進(jìn)行模式識(shí)別。隨著安裝的傳感器數(shù)量的增加,需要更高的 CNN 性能。然而,隨著功耗與性能成正比增加,需要一個(gè)笨重且昂貴的水冷系統(tǒng)。需要同時(shí)實(shí)現(xiàn)高深度學(xué)習(xí)性能和低功耗,以實(shí)現(xiàn)輕量級(jí)且具有成本效益的空氣冷卻系統(tǒng)。從實(shí)際的角度來(lái)看,實(shí)現(xiàn) 60TOPS 的 CNN 性能和 10TOPS/W 的效率是每個(gè) LSI 設(shè)備的最佳目標(biāo)。
具有高性能和高能效的 CNN 加速器
CNN 加速器 (CNNA) 的性能/效率目標(biāo)是實(shí)現(xiàn) 60TOPS 性能和 10TOPS/W 效率。從實(shí)現(xiàn)的角度來(lái)看,它是用三個(gè)相同的加速器而不是一個(gè)加速器來(lái)實(shí)現(xiàn)的。一個(gè)CNNA包含13,824個(gè)MAC算術(shù)單元,工作頻率為800MHz。三個(gè)CNNA的理論最大性能為66TOPS。此外,每個(gè) CNNA 通過(guò)一個(gè) 512 位互連模塊連接 2MB 專用暫存器 (SPM)。這提高了CNNA的執(zhí)行效率,將CNNA與外部存儲(chǔ)器(DRAM)之間傳輸?shù)臄?shù)據(jù)量減少了約90%,并節(jié)省了DRAM接口和互連所消耗的功率。從測(cè)試芯片的實(shí)測(cè)來(lái)看,VGG16的性能為32TOPS,效率為6.1TOPS/W,CNNA優(yōu)化網(wǎng)絡(luò)(Network-A)的性能為60.6TOPS,效率為13。
ASIL D 任務(wù)的安全機(jī)制
下一代 ADAS 和 AD 系統(tǒng)需要實(shí)現(xiàn) ASIL D 的功能安全,這是 ISO 26262 中最嚴(yán)格的安全級(jí)別。雙核鎖步 (DCLS) 是可以滿足 ASIL D 指標(biāo)的方法之一。可以通過(guò)在兩個(gè)冗余硬件上執(zhí)行相同的過(guò)程并比較它們各自的輸出來(lái)檢測(cè)。
CNNA 還需要硬件冗余來(lái)滿足 ASIL D 指標(biāo),但簡(jiǎn)單地應(yīng)用 DCLS 需要大型 MAC 計(jì)算單元來(lái)實(shí)現(xiàn)冗余。這是不實(shí)用的,因?yàn)槊娣e和功耗顯著增加。為了在不添加冗余硬件的情況下實(shí)現(xiàn) ASIL D 指標(biāo),兩個(gè) CNNA(CNNA1 和 CNNA2)由軟件動(dòng)態(tài)配置,以在需要安全的處理過(guò)程中執(zhí)行鎖步操作。
CNNA 用于從相機(jī)輸入的圖像識(shí)別處理 (ASIL B) 和從每個(gè)傳感器輸入的結(jié)果 (ASIL D) 對(duì)周圍環(huán)境進(jìn)行建模。但大部分執(zhí)行時(shí)間是以前的 ASIL B 圖像識(shí)別處理。因此,通過(guò)僅在周圍環(huán)境建模處理期間將 CNNA1 和 CNNA2 切換為鎖步操作,可以在不顯著影響性能或功率效率的情況下實(shí)現(xiàn) ASIL D 任務(wù)。
下面是CNNA使用鎖步DMAC(LDMAC)的鎖步操作。
1) LDMAC 將相同的數(shù)據(jù)從 DRAM 加載到 SPM1 和 SPM2。
2)CNNA1和CNNA2執(zhí)行相同的網(wǎng)絡(luò)處理。
3) LDMAC 從 SPM1 和 SPM2 讀取執(zhí)行結(jié)果并進(jìn)行比較。如果它們不匹配,則判斷為錯(cuò)誤。只有CNNA1的結(jié)果存儲(chǔ)在DRAM中。
實(shí)現(xiàn) ASIL D 的另一個(gè)重要因素是免于干擾 (FFI)。系統(tǒng)中混合了具有不同 ASIL 的任務(wù)。他們不得干擾更高級(jí)別的 ASIL 任務(wù)。前面說(shuō)過(guò),CNNA是被不同ASIL級(jí)別的任務(wù)訪問的,所以每個(gè)任務(wù)使用的內(nèi)存空間必須是獨(dú)立的。
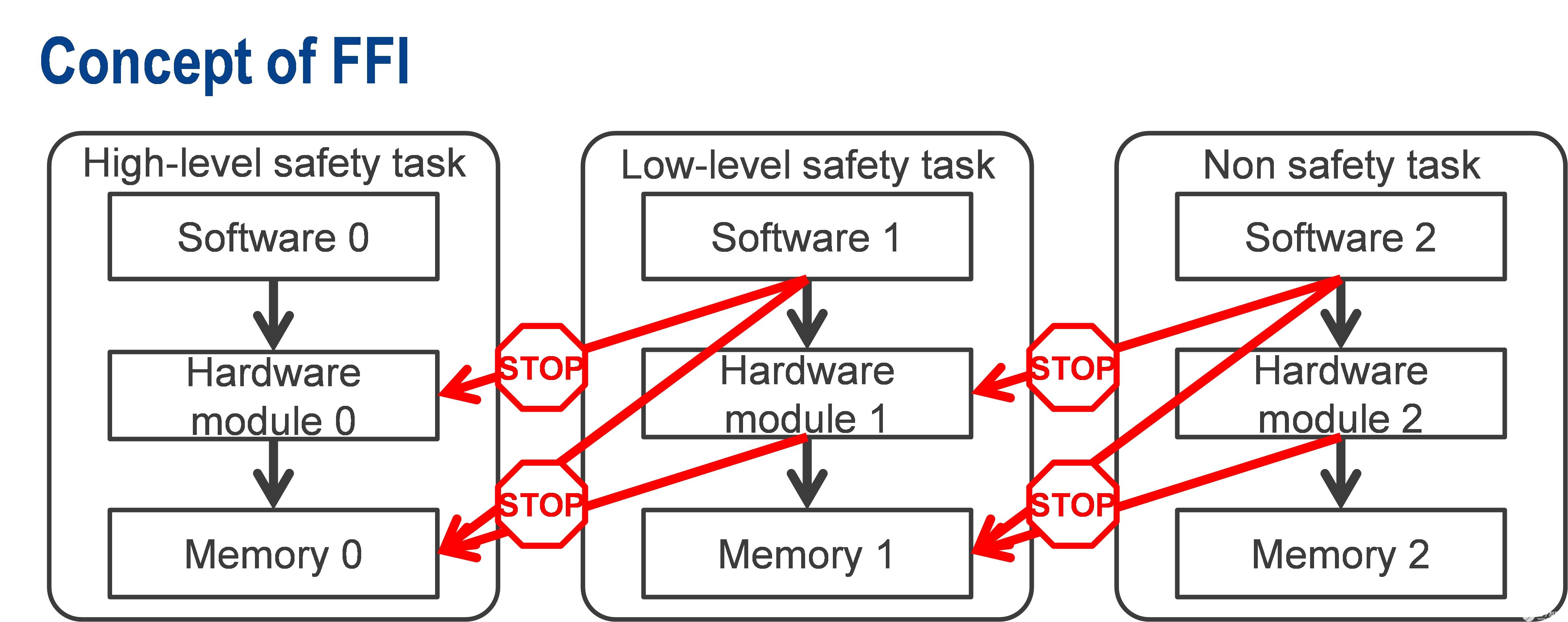
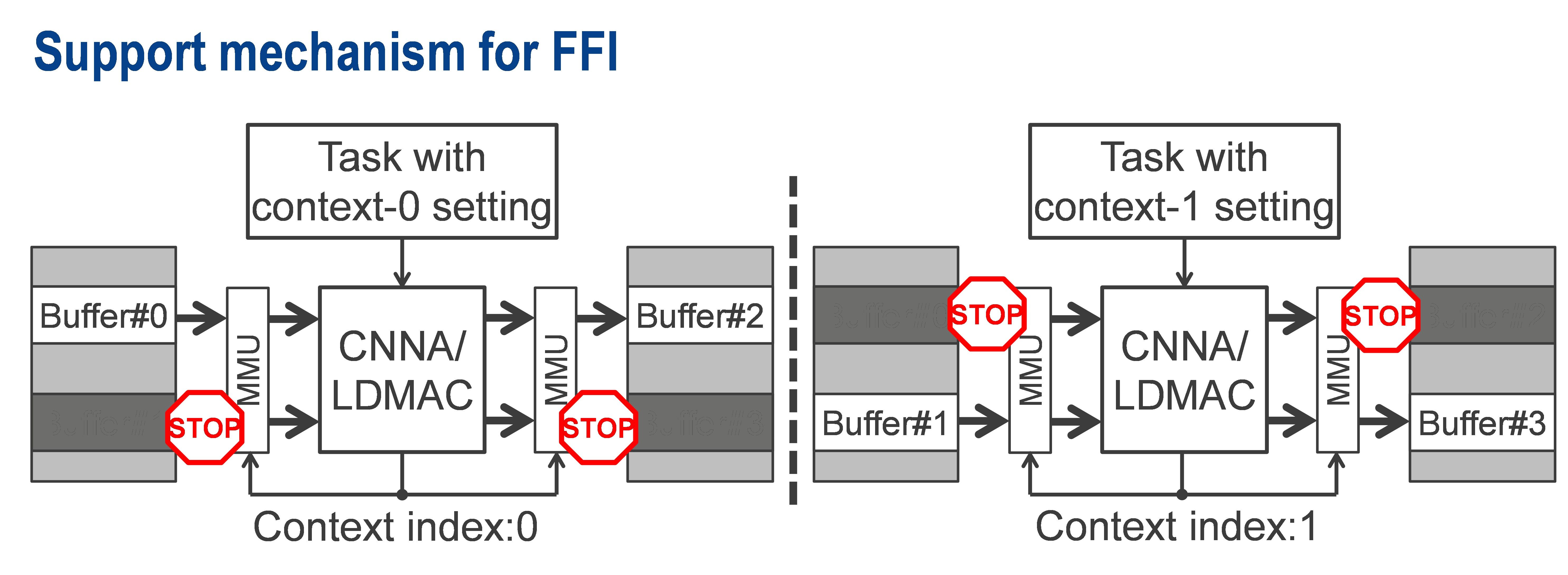
內(nèi)存空間隔離機(jī)制在CNNA、LDMAC和內(nèi)存管理單元(MMU)的內(nèi)存保護(hù)表中實(shí)現(xiàn)。當(dāng)前運(yùn)行任務(wù)的上下文索引被賦予來(lái)自CNNA和LDMAC的事務(wù)輸出。MMU 接收它并在逐個(gè)事務(wù)的基礎(chǔ)上切換上下文。
審核編輯:郭婷
-
DRAM
+關(guān)注
關(guān)注
40文章
2348瀏覽量
185613 -
adas
+關(guān)注
關(guān)注
310文章
2258瀏覽量
210225 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
789文章
14316瀏覽量
170591
發(fā)布評(píng)論請(qǐng)先 登錄
SS12A1T汽車連接器現(xiàn)貨供應(yīng),助力汽車電氣化升級(jí)
Vicor高效電源模塊優(yōu)化自動(dòng)駕駛系統(tǒng)
經(jīng)緯恒潤(rùn)和白犀牛達(dá)成戰(zhàn)略合作,加速自動(dòng)駕駛商業(yè)化進(jìn)程

新能源車軟件單元測(cè)試深度解析:自動(dòng)駕駛系統(tǒng)視角
?從ISO到UL:捷多邦如何確保高端PCB的高可靠性?
深度解析SSD2351核心板:硬核視頻處理+工業(yè)級(jí)可靠性設(shè)計(jì)
關(guān)于RISC-V芯片的應(yīng)用學(xué)習(xí)總結(jié)
愛普生M-G366PDG適用于商用車自動(dòng)駕駛領(lǐng)域
AUTOSAR通信對(duì)自動(dòng)駕駛的影響 AUTOSAR通信與嵌入式系統(tǒng)設(shè)計(jì)
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

貿(mào)澤開售適用于高性能計(jì)算應(yīng)用的AMD Alveo V80加速器卡
適用于數(shù)據(jù)中心應(yīng)用中的硬件加速器的直流/直流轉(zhuǎn)換器解決方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論