") CM CANopenS7-1200 PLC的CANopen主站/從站模塊
CM CANopenS7-1200 PLC的CANopen主站/從站模塊

AGV小車的基礎(chǔ)控制
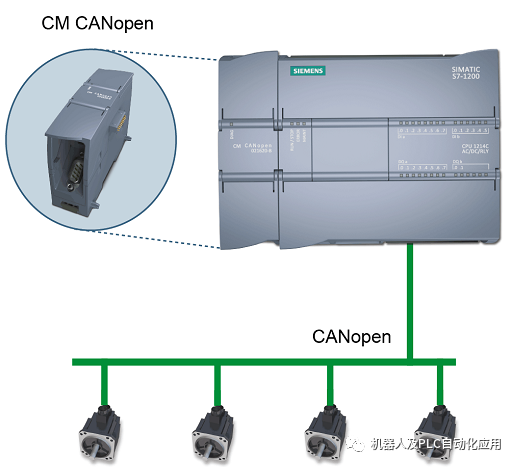
HMS Industrial Networks 的 CM CANopen 模塊與 Siemens 的 S7-1200 PLC 的 TIA Portal 配置示例。在此示例中,使用了 1214C 類型的 CPU,但該示例也可以應(yīng)用于所有其他 PLC 類型。要運行此示例,必須已安裝可從 https://www.ixxat.com/technical-support/resources/downloads-and-documentation?ordercode=021620-B下載的 HSP 文件。
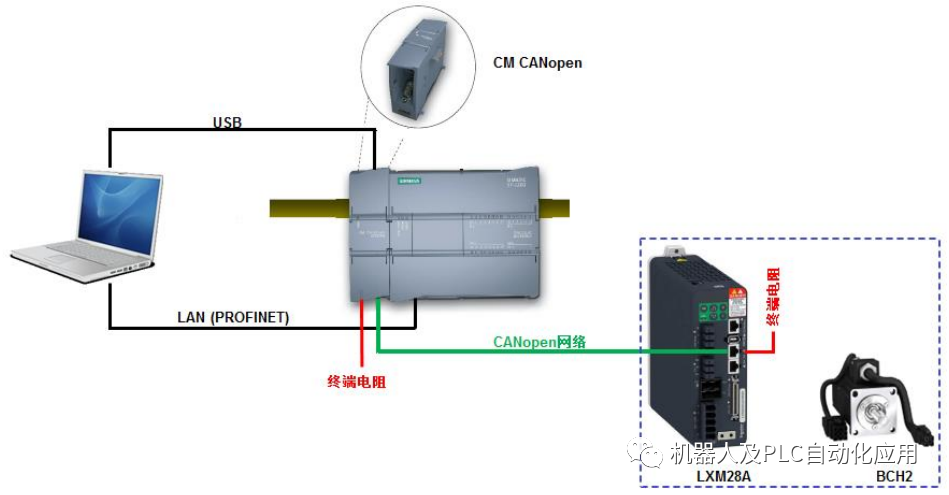
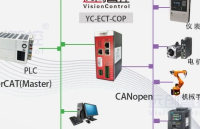
CANopen網(wǎng)絡(luò)連接:
分別對應(yīng)連接CM模塊和LXM28A伺服的CAN_H、CAN_L和SHLD引腳,在CM模塊CAN_H和CAN_L之間接入120歐姆電阻,并且在CANopen網(wǎng)絡(luò)中最后一臺設(shè)備CAN_H和CAN_L之間接入120歐姆電阻。
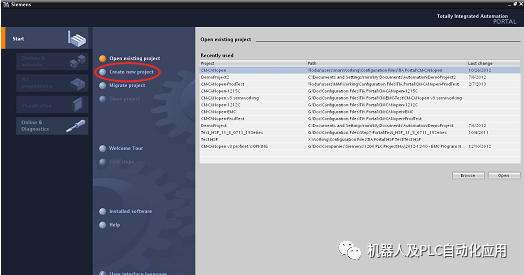
打開 TIA Portal 程序并通過單擊屏幕左側(cè)的“創(chuàng)建新項目”開始一個新項目。
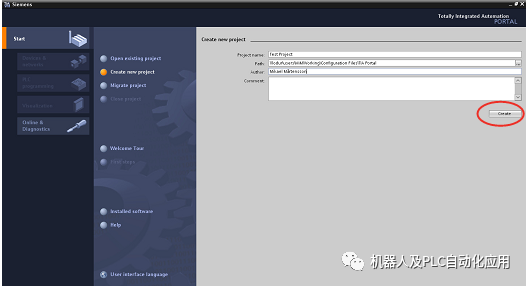
2. 輸入項目名稱和項目存儲路徑,可選擇包含作者和描述性注釋等信息。按“創(chuàng)建”。
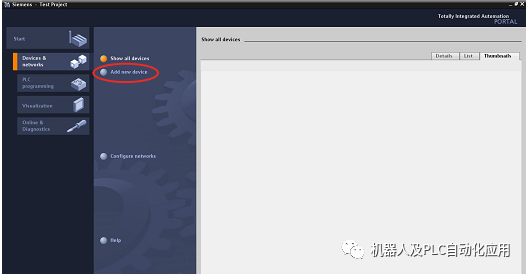
3. 選擇左側(cè)的“設(shè)備和網(wǎng)絡(luò)”,然后按“添加新設(shè)備”。
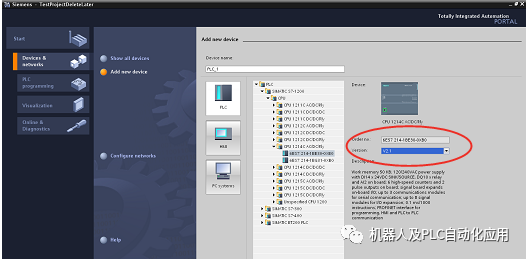
4. 選擇配置中使用的 PLC 類型。選擇正確的軟件版本并可選擇輸入 PLC 的名稱(默認(rèn) PLC_1)。按“添加”。
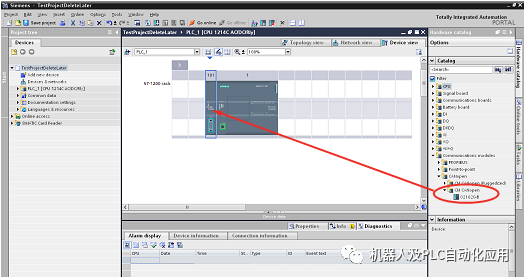
5. 如圖所示,在列表中選擇CM CANopen模塊。將模塊的一個實例拖放到 PLC 模塊的左側(cè)。
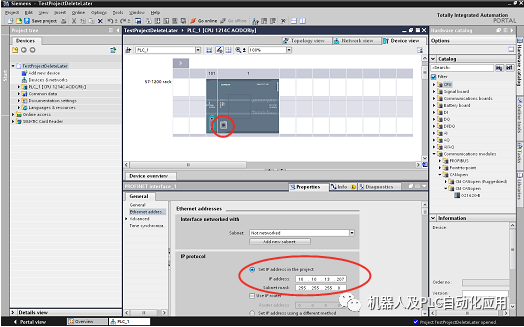
6. 雙擊 PLC 上的以太網(wǎng)連接器并為 PLC 輸入正確的 IP 地址。
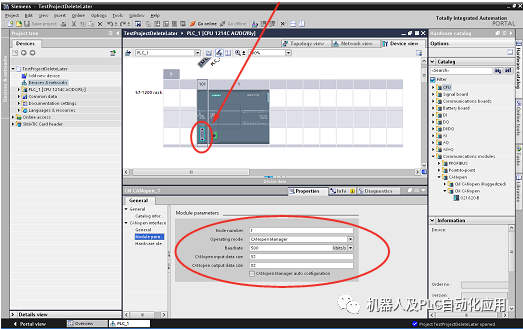
7. 雙擊CM CANopen模塊的連接器,選擇模塊參數(shù)選項卡。在參數(shù)列表中輸入值。請注意,這些參數(shù)對 CANopen 網(wǎng)絡(luò)上的模塊有效。
在本例中,用于 S7-1200 的 CM CANopen 模塊被配置為 CANopen 管理器。
CANopen 網(wǎng)絡(luò)上的節(jié)點號為 1。CANopen 波特率設(shè)置為 500 kbit/s,輸入數(shù)據(jù)大小和輸出數(shù)據(jù)大小均設(shè)置為 32 字節(jié)。
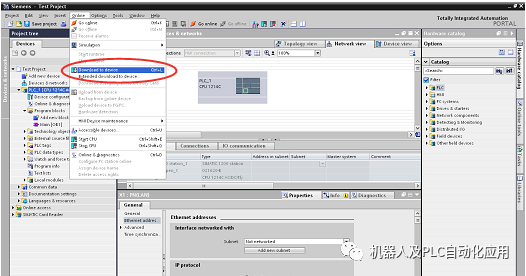
8. 配置現(xiàn)已完成,可以下載到 S7-1200 設(shè)備。要下載軟件配置,請選擇右側(cè)的 PLC_1,然后選擇“在線”>“下載到設(shè)備”。要下載硬件配置,請右鍵單擊樹中的設(shè)備并選擇“下載到設(shè)備”>“全部”。
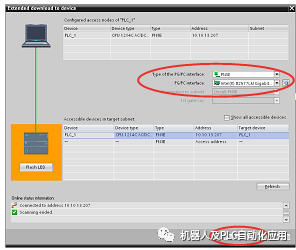
9. 選擇您正在使用的 PG/PC 接口(在此示例中為 PN/IE)和您 PC 上的以太網(wǎng)接口(在此示例中為 Intel 82577...)。如果在網(wǎng)絡(luò)上找到之前輸入的 IP 地址,請按“加載”下載到您的設(shè)備。如果沒有,請從“目標(biāo)子網(wǎng)中的可訪問設(shè)備”窗口中的可用列表中選擇正確的設(shè)備。如果設(shè)備在另一個子網(wǎng)上,并且在此窗口中不可用,則必須選中“顯示所有可訪問的設(shè)備”復(fù)選框。
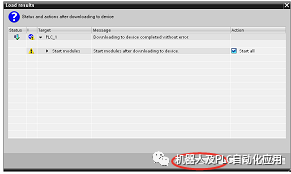
10.如果下載成功,將出現(xiàn)以下屏幕詢問PLC是否應(yīng)該啟動。按完成,PLC 將開始運行下載的空程序。
11.模塊配置完成,可以開始PLC編程了。
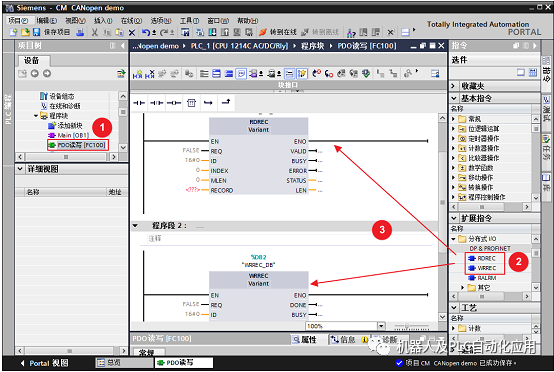
創(chuàng)建用于進(jìn)行PDO數(shù)據(jù)讀寫的FC功能塊:①在“程序塊”中添加FC100功能塊并命名為“PDO讀寫”;② 在“擴展指令”下展開“分布式IO”找到RDREC和WRREC指令;③分別將RDREC和WRREC指令拖入程序段1和程序段2中。
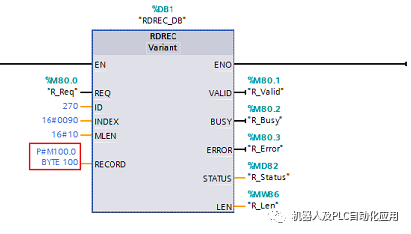
RDREC參數(shù)說明:讀取PDO數(shù)據(jù)
REQ 功能塊使能位 VALID TRUE代表新的數(shù)據(jù)記錄已接收且有效
ID CM模塊硬件標(biāo)識符 BUSY TRUE代表讀取數(shù)據(jù)的過程還未完成
INDEX 16#0090 ERROR TRUE代表在讀取數(shù)據(jù)的過程中產(chǎn)生錯誤
MLEN CANopen輸入數(shù)據(jù)大小(bytes) STATUS 功能塊狀態(tài)和錯誤信息
RECORD 讀取的數(shù)據(jù)存放的地址域 LEN 讀取數(shù)據(jù)的長度
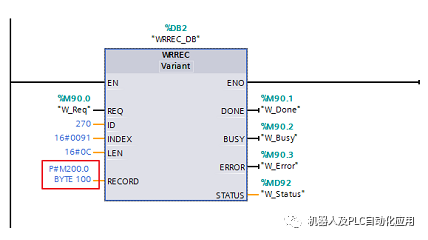
WRREC參數(shù)說明:寫入PDO數(shù)據(jù)
REQ 功能塊使能位 DONE TRUE代表數(shù)據(jù)已寫入CM模塊
ID CM模塊硬件標(biāo)識符 BUSY TRUE代表寫入數(shù)據(jù)的過程還未完成
INDEX 16#0091 ERROR TRUE代表在讀取數(shù)據(jù)的過程中產(chǎn)生錯誤
LEN CANopen輸出數(shù)據(jù)大小(bytes) STATUS 功能塊狀態(tài)和錯誤信息
RECORD 寫入的數(shù)據(jù)來源的地址域
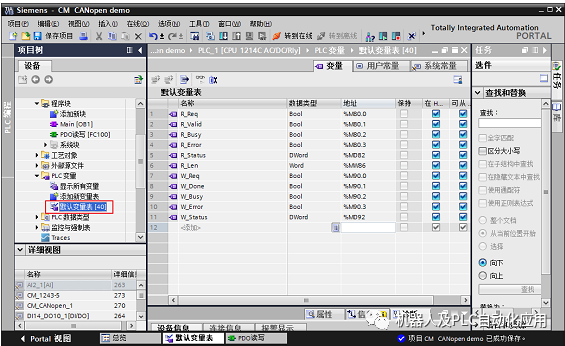
2. 創(chuàng)建PDO讀寫指令塊變量:打開“PLC變量”下的“默認(rèn)變量表”,分別添加PDO讀寫指令塊需要用到的參數(shù)變量:
3. PDO讀取數(shù)據(jù)指令塊的參數(shù)具體分配如下圖所示:
1) 讀取的數(shù)據(jù)存放于M區(qū)中起始地址為100,長度為100Bytes(需大于或者等于MLEN)的地址區(qū)間。MLEN表明了該區(qū)間的有效數(shù)據(jù)長度,即CANopen輸入數(shù)據(jù)大小。
2) 可以創(chuàng)建DB數(shù)據(jù)塊(例如DB3),RECORD定義為P#DB3.DBX100.0 BYTE 100,讀取的數(shù)據(jù)存入DB3塊中起始地址100,長度100Bytes 的地址區(qū)間。注意DB塊屬性中的“優(yōu)化的塊訪問”不要勾選。
4. PDO寫入數(shù)據(jù)指令塊的參數(shù)具體分配如下圖所示:
1) 寫入的數(shù)據(jù)來源于M區(qū)中起始地址為200,長度為100Bytes(需大于或者等于LEN)的地址區(qū)間。LEN表明了該區(qū)間中的有效數(shù)據(jù)長度,即CANopen輸出數(shù)據(jù)大小。
2) 可以創(chuàng)建DB數(shù)據(jù)塊(例如DB3),RECORD定義為P#DB3.DBX200.0 BYTE 100,寫入的數(shù)據(jù)來源于DB3塊中起始地址200,長度100Bytes 的地址區(qū)間。注意DB塊屬性中的“優(yōu)化的塊訪問”不要勾選。
5. 根據(jù)以上配置可以確認(rèn)PDO傳輸參數(shù)的地址映射如下表所示:
6. 數(shù)據(jù)轉(zhuǎn)換:由于CANopen和PLC分別使用的不同的數(shù)據(jù)格式,所以需要將PDO傳輸?shù)脑紨?shù)據(jù)轉(zhuǎn)換為可以直接進(jìn)行讀取和設(shè)定的用戶數(shù)據(jù):
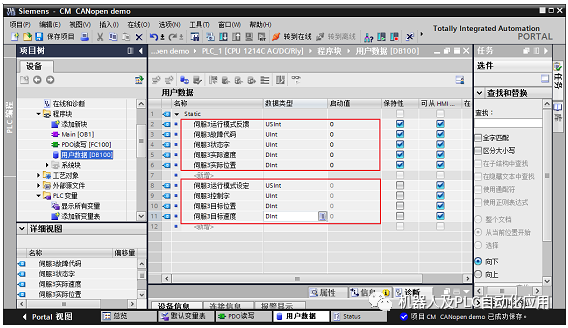
1) 創(chuàng)建用戶數(shù)據(jù)塊:創(chuàng)建全局?jǐn)?shù)據(jù)塊DB100,并在DB100中分別添加需要對伺服進(jìn)行讀取的反饋參數(shù)和需要對伺服進(jìn)行寫入的設(shè)定參數(shù)。
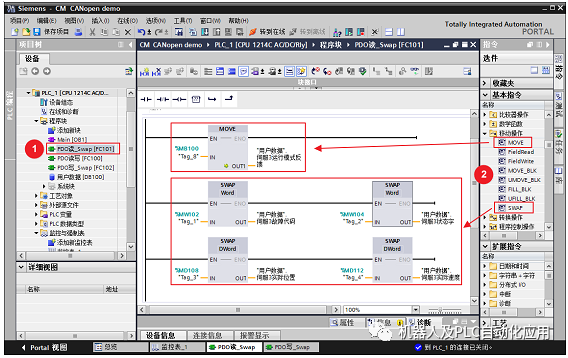
2) 創(chuàng)建PDO讀取數(shù)據(jù)轉(zhuǎn)換功能塊FC101:①在“程序塊”中添加FC101功能塊并命名為“PDO讀_Swap”;② 利用Swap指令和Move指令將PDO讀取的數(shù)據(jù)轉(zhuǎn)換為用戶數(shù)據(jù)。
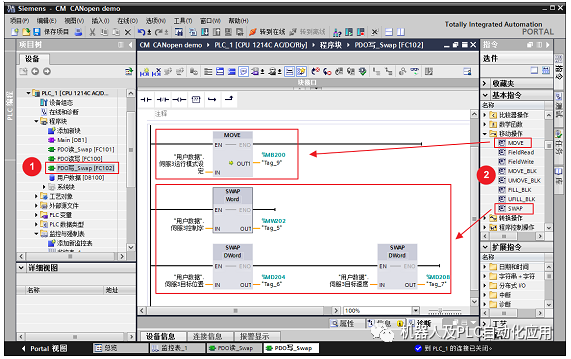
3) 創(chuàng)建PDO寫入數(shù)據(jù)轉(zhuǎn)換功能塊FC102:①在“程序塊”中添加FC102功能塊并命名為“PDO寫_Swap”;② 利用Swap指令和Move指令將用戶數(shù)據(jù)轉(zhuǎn)換為PDO寫入的數(shù)據(jù)。
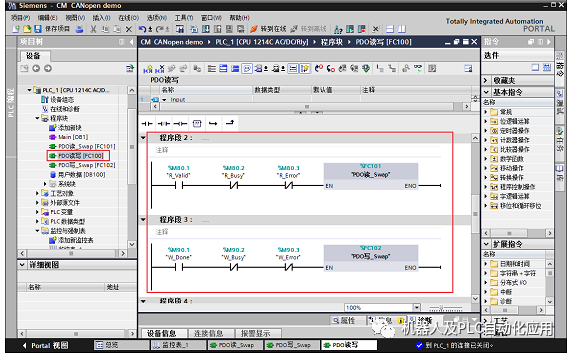
4) 在PDO讀寫功能塊中調(diào)用FC101和FC102: 打開FC100功能塊,在程序段1(RDREC)和程序段2(WRREC)之間插入新的程序段,在新的程序段中分別調(diào)用FC101和FC102如圖所示:
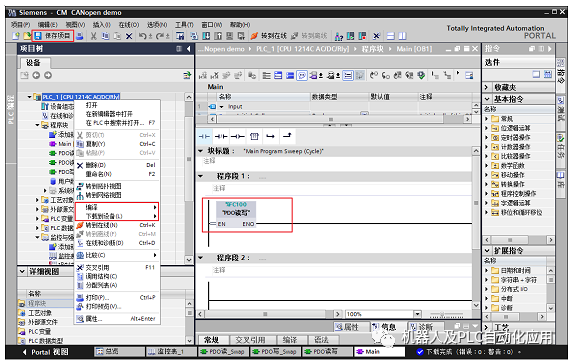
7. 在OB1中調(diào)用PDO讀寫功能塊FC100,保存配置并進(jìn)行編譯下載:
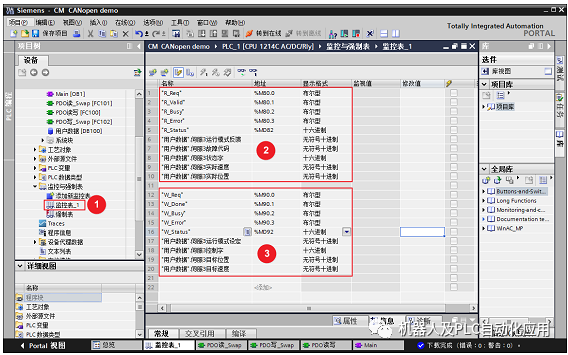
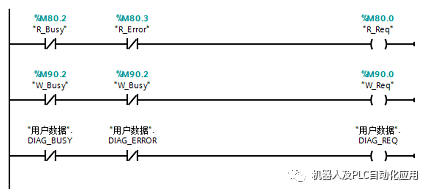
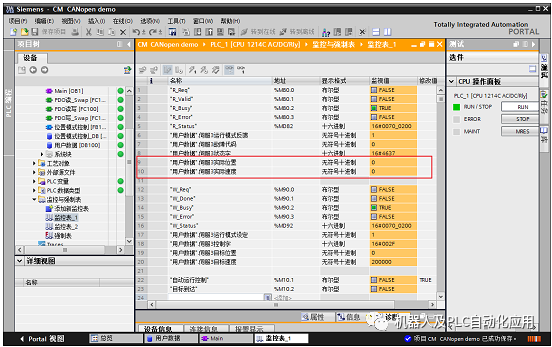
8. 創(chuàng)建監(jiān)控表:①在“監(jiān)控與強制表”中添加新的監(jiān)控表;②添加PDO讀取數(shù)據(jù)指令塊的對應(yīng)變量和用戶數(shù)據(jù)塊中的伺服狀態(tài)參數(shù);③添加PDO寫入數(shù)據(jù)指令塊的對應(yīng)變量和用戶數(shù)據(jù)塊中的伺服控制參數(shù)。
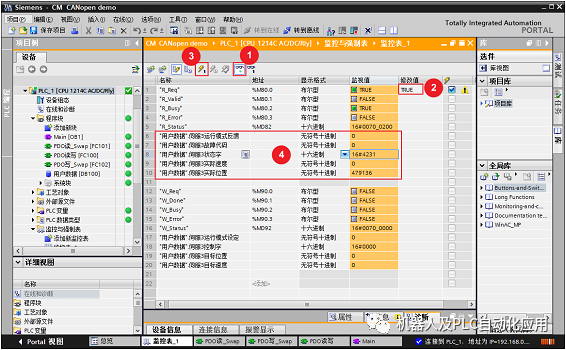
9. 在線進(jìn)行監(jiān)控:①點擊“監(jiān)控”圖標(biāo)進(jìn)入在線狀態(tài);②將R_Req的修改值置為TRUE;③點擊“立即修改”圖標(biāo)將修改值寫入對應(yīng)變量;④ 伺服狀態(tài)參數(shù)的對應(yīng)數(shù)據(jù)已經(jīng)被成功讀取,查看伺服通訊手冊可知狀態(tài)字16#4231代表伺服處于“Ready to Switch On”狀態(tài)。
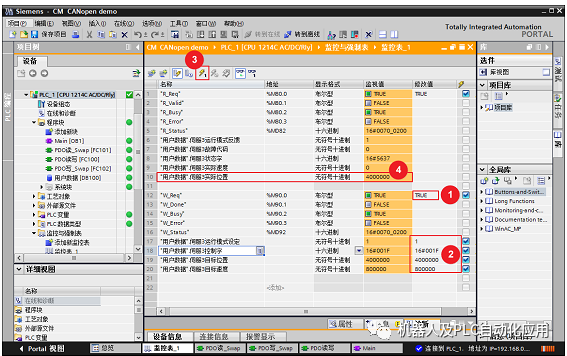
10. 絕對位置運動控制測試:① 將W_Req修改值置為TRUE;② 分別對伺服控制參數(shù)進(jìn)行賦值;③依次向控制字中寫入0x0006?0x0007?0x000F?0x001F,每次賦值后點擊“立即修改”圖標(biāo);④ 電機轉(zhuǎn)動一段時間后停止,此時讀取實際位置數(shù)據(jù)與目標(biāo)位置數(shù)據(jù)一致。
-----伺服運動控制例程 -------
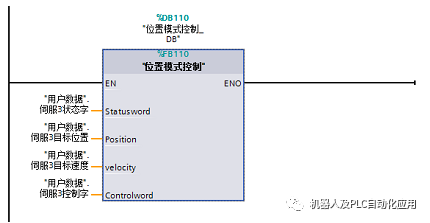
該部分以位置模式下的“絕對位置,立刻更新”控制方式為例,編寫對伺服進(jìn)行運動控制的簡單例程,供用戶在實際編程應(yīng)用中作參考。
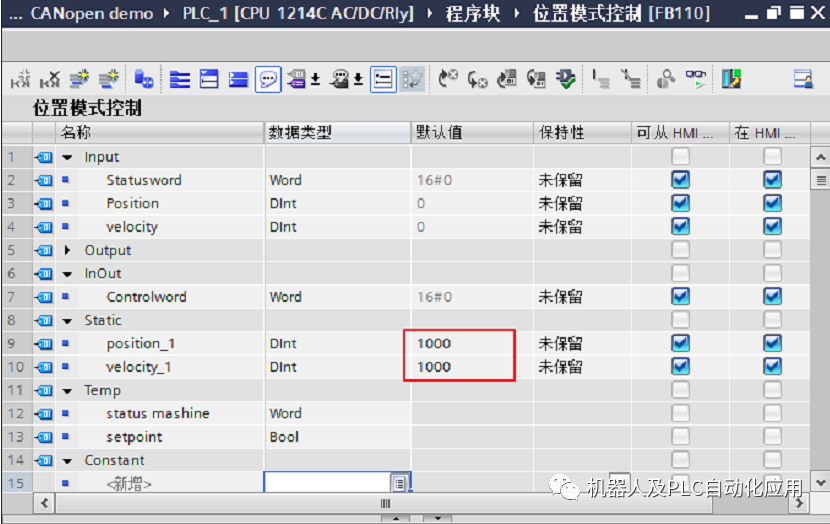
創(chuàng)建功能塊FB110并進(jìn)行變量聲明:①在“程序塊”中添加FB110 功能塊并命名為“位置模式控制”;② 在“變量聲明表”中添加以下變量:
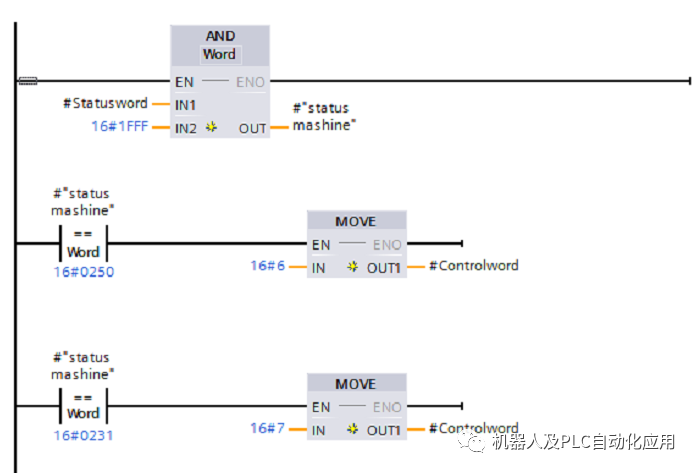
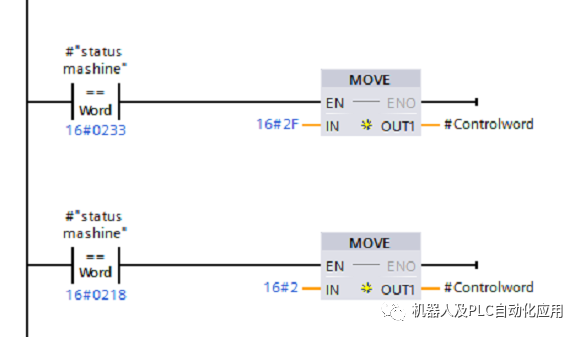
2. 在程序段1中編寫程序用于控制伺服上電后自動進(jìn)入“運行使能”狀態(tài):
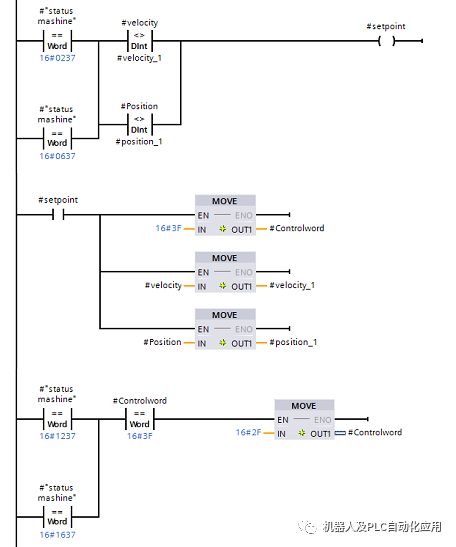
3. 在程序段2中編寫程序用于自動觸發(fā)“絕對位置,立即更新”方式下的位移指令:
4. 在OB1組織塊的程序段3中編寫程序用于控制PLC自動使能PDO讀寫和網(wǎng)絡(luò)診斷:
5. 在OB1組織塊的程序段4中調(diào)用FB110并賦予實參如圖所示:
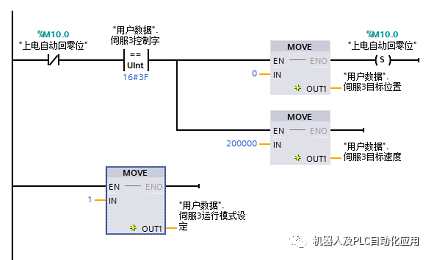
6. 在OB1組織塊的程序段5中編寫程序用于控制伺服上電后自動回零:
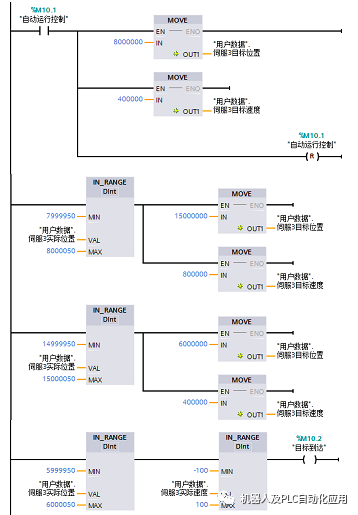
7. 在OB1組織塊的程序段6中編寫程序用于控制伺服自動進(jìn)行連續(xù)的正反轉(zhuǎn)位移指令:
8. 點擊“保存項目”并重新進(jìn)行編譯和下載。下載完成后對PLC和伺服重新上電,此時可以看到電機緩慢轉(zhuǎn)動一段時間后停止,此時通過PLC監(jiān)控表或者伺服HMI可以看到實際位置顯示為0:
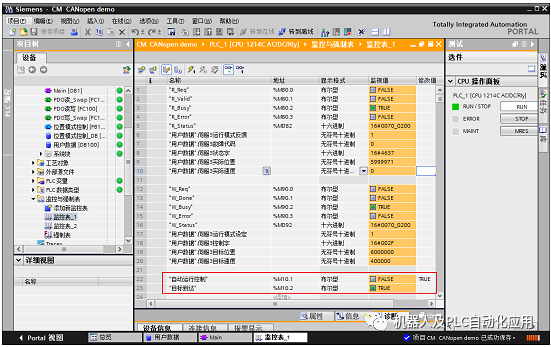
9. 在監(jiān)控表中添加“自動運行控制”和“目標(biāo)到達(dá)”變量,向“自動運行控制”中寫入修 改值TRUE,此時可以看到電機先以較慢的速度正向移動到8000000位置(第一段位移指令),然后以較快速度正向移動到15000000位置(第二段位移指令),最后以較慢的速度反向移動到6000000位置(第三段位移指令),此時“目標(biāo)到達(dá)”為TRUE。
提示:“目標(biāo)到達(dá)”為TRUE后再次向“自動運行控制”中寫入修 改值TRUE,電機會再次自動執(zhí)行以上三段位移指令。
--------------------待續(xù)------------------
審核編輯 :李倩
-
cpu
+關(guān)注
關(guān)注
68文章
11057瀏覽量
216380 -
AGV
+關(guān)注
關(guān)注
27文章
1434瀏覽量
42134
原文標(biāo)題:CM CANopenS7-1200 PLC的CANopen主站/從站模塊,使用的功能塊
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
開疆智能Devicenet轉(zhuǎn)ModbusTCP網(wǎng)關(guān)連接臺達(dá)從站通訊模塊配置案例

開疆智能Profinet轉(zhuǎn)Profibus網(wǎng)關(guān)連接EC-CM-P1 PROFIBUS DP從站通訊模塊配置案例
profibusDP主站轉(zhuǎn)profinet網(wǎng)關(guān)接ABB電機保護(hù)單元與1200plc通訊

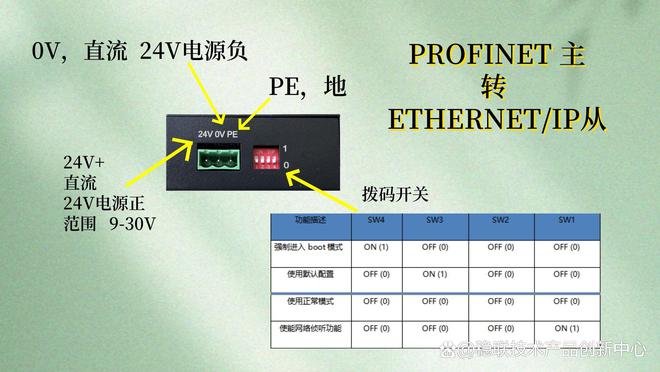
還在為工業(yè)網(wǎng)關(guān)的ETHERNET/IP從站配置和CANopen主站設(shè)置感到困擾?本文將為您詳細(xì)解析工業(yè)協(xié)議轉(zhuǎn)換的配置技巧
穩(wěn)準(zhǔn)狠!profinet主站轉(zhuǎn)ethernetIP網(wǎng)關(guān)絲滑操控傳感器與PLC通信
三格電子-EtherCAT從站轉(zhuǎn)ModbusTCP主站/從站網(wǎng)關(guān)
Profinet從站轉(zhuǎn)EtherNet/IP從站網(wǎng)關(guān)

Profinet通訊網(wǎng)關(guān)模塊之Modbus TCP從站轉(zhuǎn)profinet主站案例
新手必看!搞清楚Modbus主站和從站,讓你成為通信達(dá)人
【CANopen系列】CANopen從站為什么總不上傳PDO報文?

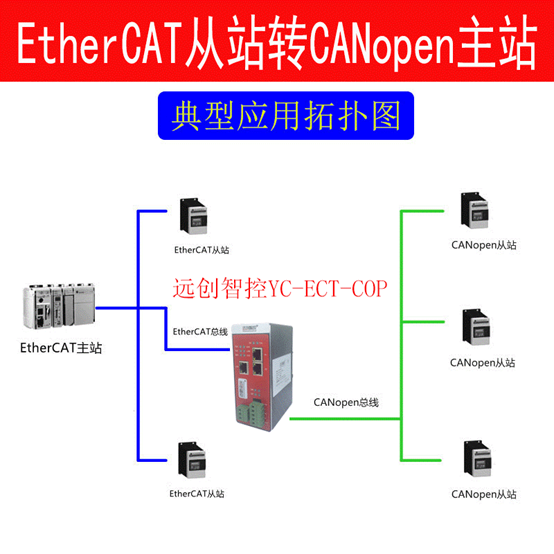
EtherCAT從站轉(zhuǎn)CANopen主站總線協(xié)議轉(zhuǎn)換網(wǎng)關(guān)配置詳情
EtherCAT轉(zhuǎn)Profinet主站協(xié)議網(wǎng)關(guān)(YC-PNM-ECT)
CANopen主站轉(zhuǎn)Profinet從站協(xié)議網(wǎng)關(guān)(JM-PN-COP)

EtherCAT從站轉(zhuǎn)CANopen主站協(xié)議網(wǎng)關(guān)(JM-ECT-COP)
EtherCAT從站轉(zhuǎn)CANopen主站總線協(xié)議轉(zhuǎn)換網(wǎng)關(guān)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論