") 單片機(jī)的通信協(xié)議該如何設(shè)計(jì)
單片機(jī)的通信協(xié)議該如何設(shè)計(jì)

通信設(shè)計(jì)中考慮協(xié)議的靈活性,經(jīng)常把協(xié)議設(shè)計(jì)成“不定長度”。
一個(gè)實(shí)例如下圖:銳米LoRa終端的通信協(xié)議幀。
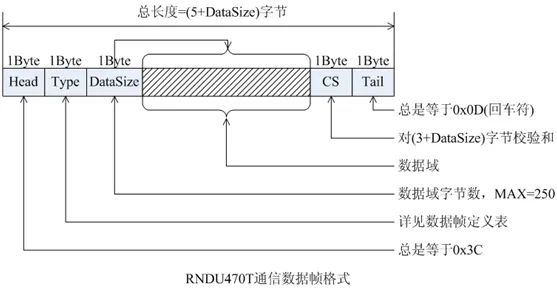
如果一個(gè)系統(tǒng)接收上述“不定長度”的協(xié)議幀,將會(huì)有一個(gè)挑戰(zhàn)--如何高效接收與解析。
為簡化系統(tǒng)設(shè)計(jì),我們強(qiáng)烈建議您采用“狀態(tài)機(jī)”來解析UART數(shù)據(jù)幀,并且把解析工作放在ISR(中斷服務(wù)程序)完成,僅當(dāng)接收到最后一個(gè)字節(jié)(0x0D)時(shí),再將整個(gè)數(shù)據(jù)幀提交給進(jìn)程處理。
該解析狀態(tài)機(jī)的原理如下圖所示:
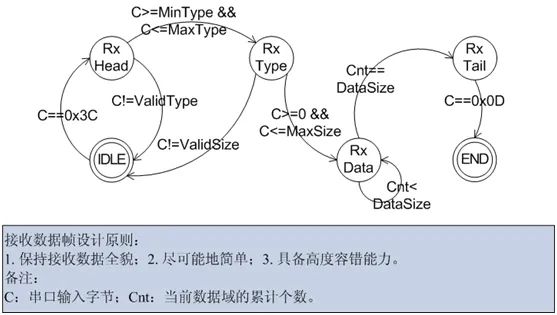
那么ISR處理這個(gè)狀態(tài)機(jī)來得及嗎?答案是:so easy!因?yàn)樗挥?個(gè)動(dòng)作,運(yùn)算量十分小:
比較接收數(shù)據(jù) -> 更新狀態(tài)變量 -> 存儲(chǔ)接收數(shù)據(jù),C語言僅3條語句,翻譯成機(jī)器指令也不超過10條。
代碼清單如下:
/*** @brief Status of received communication frame*/typedef enum{STATUS_IDLE = (uint8_t)0,STATUS_HEAD, /* Rx Head=0x3C */STATUS_TYPE, /* Rx Type */STATUS_DATA, /* Data filed */STATUS_TAIL, /* Tail=0x0D */STATUS_END, /* End of this frame */} COMM_TRM_STATUS_TypeDef;/*** @brief Data object for received communication frame*/typedef struct{uint8_t byCnt; /* Count of 1 field */uint8_t byDataLen; /* Length of data field */uint8_t byFrameLen; /* Length of frame */COMM_TRM_STATUS_TypeDef eRxStatus;uint8_t a_byRxBuf[MAX_LEN_COMM_TRM_DATA];} COMM_TRM_DATA;/*** @brief Data object for received communication frame.* @note Prevent race condition that accessed by both ISR and process.*/static COMM_TRM_DATA s_stComm2TrmData;/*** @brief Put a data that received by UART into buffer.* @note Prevent race condition this called by ISR.* @param uint8_t byData: the data received by UART.* @retval None*/void comm2trm_RxUartData(uint8_t byData){/* Update status according to the received data */switch (s_stComm2TrmData.eRxStatus){case STATUS_IDLE:if (COMM_TRM_HEAD == byData) /* Is Head */{s_stComm2TrmData.eRxStatus = STATUS_HEAD;}else{goto rx_exception;}break;case STATUS_HEAD:if (TYPE_INVALID_MIN < byData && byData < TYPE_INVALID_MAX) /* Valid type */{s_stComm2TrmData.eRxStatus = STATUS_TYPE;}else{goto rx_exception;}break;case STATUS_TYPE:if (byData <= MAX_LEN_UART_FRAME_DATA) /* Valid data size */{s_stComm2TrmData.eRxStatus = STATUS_DATA;s_stComm2TrmData.byDataLen = byData;}else{goto rx_exception;}break;case STATUS_DATA:if (s_stComm2TrmData.byCnt < s_stComm2TrmData.byDataLen){++s_stComm2TrmData.byCnt;}else{s_stComm2TrmData.eRxStatus = STATUS_TAIL;}break;case STATUS_TAIL:if (COMM_TRM_TAIL == byData){/* We received a frame of data, now tell process to deal with it! */process_poll(&Comm2TrmProcess);}else{goto rx_exception;}break;default:ASSERT(!"Error: Bad status of comm2trm_RxUartData(). ");break;}/* Save the received data */s_stComm2TrmData.a_byRxBuf[s_stComm2TrmData.byFrameLen++] = byData;return;rx_exception:ClearCommFrame();return;}
原文:
https://blog.csdn.net/jiangjunjie_2005/article/details/50619884
審核編輯:符乾江
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
單片機(jī)
+關(guān)注
關(guān)注
6067文章
44962瀏覽量
648975 -
通信協(xié)議
+關(guān)注
關(guān)注
28文章
1023瀏覽量
41052
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
Modbus 轉(zhuǎn) Profinet:工業(yè)通信協(xié)議的橋梁
1. 引言 在工業(yè)自動(dòng)化領(lǐng)域,Modbus 和 Profinet 是兩種廣泛使用的通信協(xié)議。Modbus 是一種串行通信協(xié)議,常用于連接工業(yè)電子設(shè)備,而 Profinet 是一種基于以太網(wǎng)的工業(yè)

Dali通信的工作原理 如何使用Dali通信協(xié)議
一、引言 Dali(Digital Addressable Lighting Interface,數(shù)字可尋址照明接口)是一種用于照明控制產(chǎn)品之間雙向通信的協(xié)議。通過Dali通信協(xié)議,可以實(shí)現(xiàn)對(duì)照
詳解REST API通信協(xié)議
的一環(huán)。 為了實(shí)現(xiàn)這一目標(biāo),我們采用了多種通信協(xié)議,包括MQTT、OPC UA、AMQP和REST API,它們共同構(gòu)成了智能通信的堅(jiān)實(shí)基礎(chǔ)。本期內(nèi)容,讓我們聚焦REST API通信協(xié)議,探索它如何在IIoT領(lǐng)域中發(fā)揮關(guān)鍵作用。

總線通信協(xié)議解析及應(yīng)用
在現(xiàn)代計(jì)算機(jī)系統(tǒng)中,總線通信協(xié)議扮演著至關(guān)重要的角色。它們定義了數(shù)據(jù)如何在處理器、內(nèi)存、輸入/輸出設(shè)備等組件之間傳輸。 總線通信協(xié)議的基本概念 總線通信協(xié)議是一組規(guī)則,它規(guī)定了數(shù)據(jù)在系統(tǒng)總線上的傳輸
常見串口通信協(xié)議 如何設(shè)置串口參數(shù)
串口通信是一種常見的通信方式,廣泛應(yīng)用于計(jì)算機(jī)、嵌入式系統(tǒng)和各種電子設(shè)備之間。串口通信協(xié)議主要是指在串行通信中,數(shù)據(jù)傳輸?shù)母袷胶鸵?guī)則。 常見串口通信
AUTOSAR通信協(xié)議解析 如何實(shí)現(xiàn)AUTOSAR通信
通信協(xié)議棧是一個(gè)復(fù)雜的系統(tǒng),它涵蓋了多種通信方式和模塊,以實(shí)現(xiàn)車內(nèi)ECU之間的高效、可靠的數(shù)據(jù)交換。以下是對(duì)AUTOSAR通信協(xié)議的解析及實(shí)現(xiàn)AUTOSAR通信的方法: 一、AUTOS
上位機(jī)通信協(xié)議詳解 嵌入式上位機(jī)設(shè)計(jì)流程
上位機(jī)通信協(xié)議詳解 上位機(jī)通信協(xié)議是指上位機(jī)(通常是指具有強(qiáng)大計(jì)算能力和數(shù)據(jù)處理能力的計(jì)算機(jī)系統(tǒng))與下位
串口通信協(xié)議解析 串口通信應(yīng)用實(shí)例
串口通信協(xié)議解析 串口通信協(xié)議是指規(guī)定了數(shù)據(jù)包的內(nèi)容,內(nèi)容包含了起始位、主體數(shù)據(jù)、校驗(yàn)位及停止位,雙方需要約定一致的數(shù)據(jù)包格式才能正常收發(fā)數(shù)據(jù)的有關(guān)規(guī)范。以下是串口通信協(xié)議的介紹: 基本概念
PLC控制系統(tǒng)的通信協(xié)議解析
在現(xiàn)代工業(yè)自動(dòng)化中,PLC控制系統(tǒng)扮演著至關(guān)重要的角色。它們不僅需要處理復(fù)雜的邏輯控制任務(wù),還需要與其他系統(tǒng)和設(shè)備進(jìn)行通信。為了實(shí)現(xiàn)這一目標(biāo),PLC系統(tǒng)必須遵循一系列的通信協(xié)議。 PLC通信協(xié)議
如何實(shí)現(xiàn)51單片機(jī)與PC機(jī)的串行通信
51單片機(jī)與PC機(jī)的串行通信是一種常見的通信方式,它允許單片機(jī)通過串行接口與PC機(jī)進(jìn)行數(shù)據(jù)交換。
PROFINET通信協(xié)議是什么
PROFINET通信協(xié)議是一種專為工業(yè)自動(dòng)化領(lǐng)域設(shè)計(jì)的基于以太網(wǎng)的實(shí)時(shí)通信協(xié)議。以下是對(duì)PROFINET通信協(xié)議的詳細(xì)解析,包括其定義、特點(diǎn)、體系結(jié)構(gòu)、工作原理、通信方式、應(yīng)用領(lǐng)域以及
dht11采用什么通信協(xié)議
DHT11是一款廣泛使用的溫濕度傳感器,它通過簡單的數(shù)字接口與微控制器或其他數(shù)字設(shè)備進(jìn)行通信。DHT11使用單總線通信協(xié)議,這意味著所有的數(shù)據(jù)傳輸都通過單一的數(shù)據(jù)線完成。這種通信方式簡單且成本低

簡單認(rèn)識(shí)UART通信協(xié)議
UART(Universal Asynchronous Receiver/Transmitter,通用異步收發(fā)傳輸器)通信協(xié)議是一種常見的串行通信協(xié)議,廣泛應(yīng)用于計(jì)算機(jī)、嵌入式系統(tǒng)、傳感器、無線通信





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論