 兆瓦級風力發電機的控制器進行了系統仿真
兆瓦級風力發電機的控制器進行了系統仿真

亞琛工業大學的研究人員在生成產品級代碼之前,對一臺兆瓦級風力發電機的控制器進行了系統仿真,并執行了全面的 SIL 和 HIL 測試。
風力發電機需要先進的控制策略,才能最大限度地提高功率輸出并降低結構部件上的機械負載。
模型預測控制 (MPC)是一種很有前景的風力發電機控制策略,它不僅可以處理多變量控制問題,同時可兼顧過程中的約束問題。
一些研究已經使用數值仿真來探索 MPC 在風力發電機中的應用。據我們所知,在風力發電機的 MPC 控制學術領域,我們的研究首次提供了來自兆瓦級風力發電機全尺寸現場測試的實驗 MPC 結果。
我們采用了快速控制原型 (RCP) 方法,在 MATLAB 和 Simulink 中對 MPC 算法進行建模和仿真,并在軟件在環 (SIL) 和硬件在環 (HIL) 測試中對其進行驗證。然后,我們將控制模型生成產品級代碼,用在 Bachman PLC 上,并在由 W2E Wind to Energy GmbH [6] 的同事設計和運行的 3 兆瓦風力發電機上進行了現場測試(圖 1 和 2)。
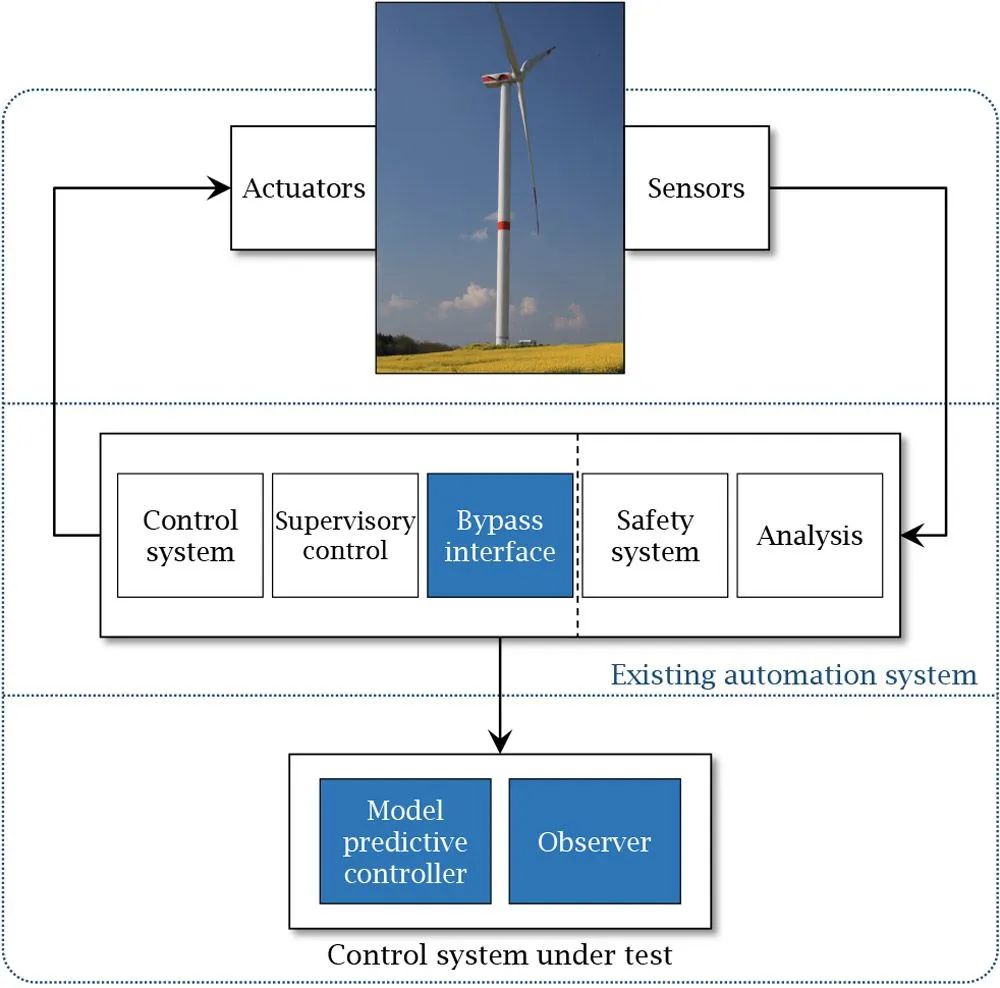
圖 2.風力發電機自動化系統的閉環結構及其主要組成。現有的自動化系統通過測試中的控制系統和旁路接口進行擴展。被控對象(頂部)展示了位于德國羅斯托克的 W2E-120/3.0fc 3 兆瓦風力發電機的原型。
風力發電機控制框架簡介
我們開發了風力發電機控制框架 (WTCF),為團隊的每位成員提供了一個一致的環境來共享活動模型、腳本和路徑。對于版本控制,我們通過 Simulink Projects 將框架與 Git 集成。
WTCF 的主模型中包括被控對象和控制系統的子模型。我們使用模型引用(model reference )分層組織設計并實現模塊化開發。該框架的文件夾結構映射了模型和子模型的層次結構(圖 3)。
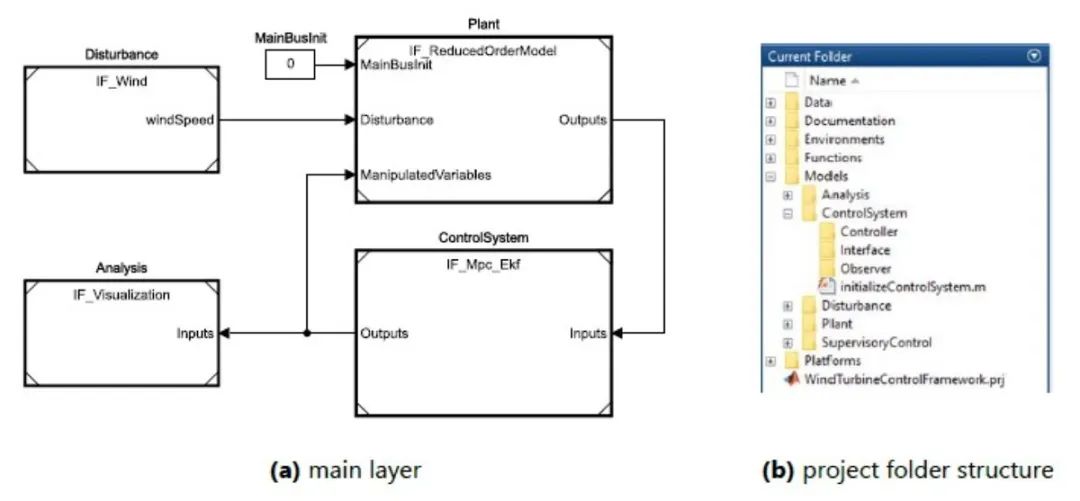
圖 3.風力發電機控制框架中的主模型 (a) 及相應的文件夾結構 (b)。(圖片來源:Dickler、Kallen、Zierath 和 Abel [1])
風力發電機和 MPC 算法建模
在我們的框架中,用非線性降階模型來表示風力發電機,該模型在初始系統仿真中作為被控對象模型,在 MPC 算法中作為內部預測模型。該
降階模型包括三個子模型:一個用于風力發電機傳動動力學的機械模型,一個用于塔架和槳葉動力學的機械模型,以及一個用于空氣動力學的模型(圖 4)。
我們使用常微分方程開發了兩個機械子模型,其參數值一部分由實際風力發電機確定,另一部分通過參數辨識的多體仿真確定。在降階模型中,我們使用了氣動力系數的靜態map圖,將風速與施加到風機機械子模型的力和力矩聯系起來。
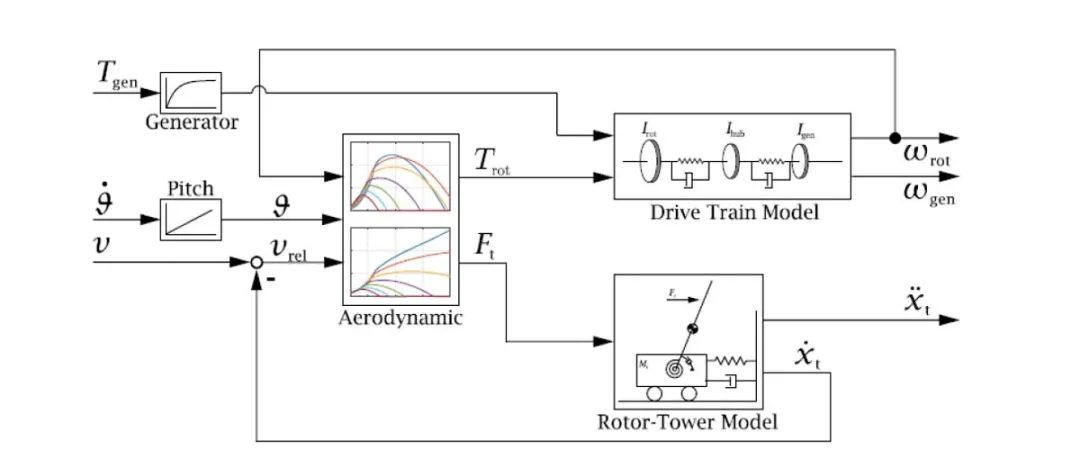
圖 4.風力發電機的非線性降階模型,包括空氣動力學的靜態map圖以及傳動系統和轉子-塔架動力學的子模型。(圖片來源:Jassman [4])
我們設計了 MPC 算法,以最大限度地提高功率輸出、讓系統運行在約束條件內,并降低由陣風或其他條件導致的動態機械負載。
該算法在 MATLAB 和 Simulink 中建模,將發電機轉速和功率作為受控變量,以最大限度地提高輸出。塔頂加速度代表機械負載,因此用作附加受控變量。
該算法使用兩個控制變量來實現其目標:風機的俯仰角速率和發電機扭矩。后者由風機的發電機-變換器系統處理,包括一個額外的、更快的控制回路。
運行系統仿真、SIL 測試和 HIL 測試
我們進行了閉環系統仿真,以驗證降階風機模型,并得出初始 MPC 算法參數,以用于 SIL 和 HIL 測試(圖 5)。
WTCF 使我們可以輕松地用更詳細的模型取代降階模型,包括使用 alaska/Wind 軟件開發的風機多體仿真模型 [7],以及使用 FAST 軟件開發的第二代模型 [8]。
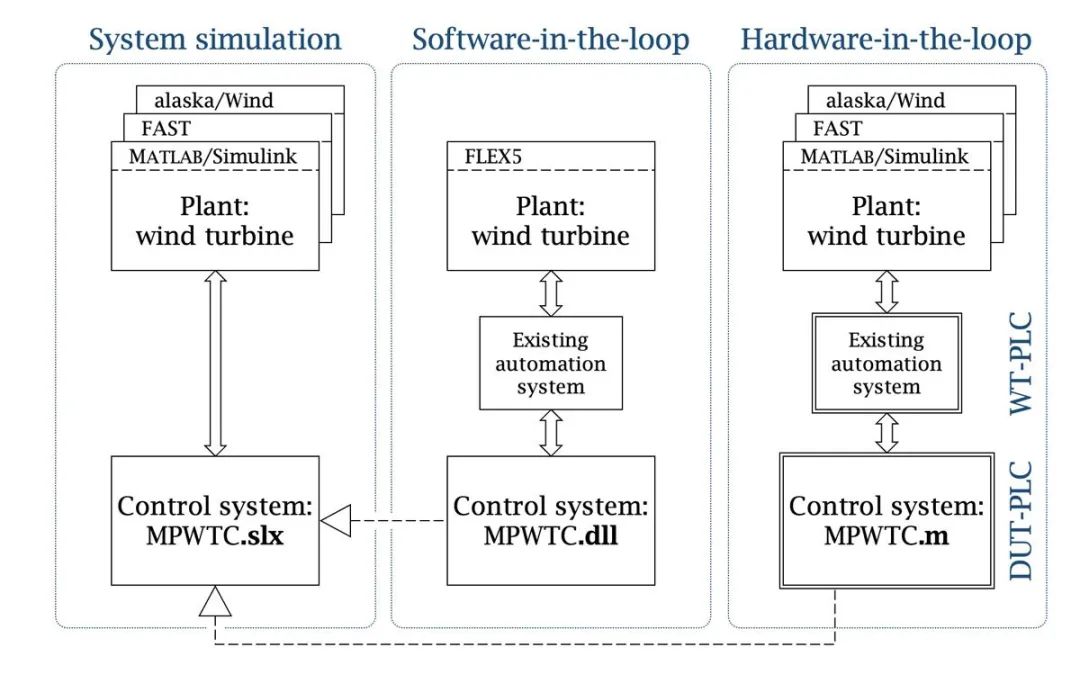
圖 5.系統仿真、SIL 測試和 HIL 測試設置。(圖片來源:Dickler、Kallen、Zierath 和 Abel [1])
使用 Embedded Coder,我們生成了控制系統的動態鏈接庫 (DLL),以針對現有自動化系統和對象模型運行閉環測試,該模型使用經認證可用于風力發電機行業的仿真工具 FLEX5 開發。FLEX5 和 alaska/Wind 對象模型均由 W2E 根據現場測試數據進行驗證 [10],結果表明,這些模型準確地反映了風力發電機的動力學特性。
我們運行了 SIL 測試來驗證 MPC 的編譯代碼能夠正常運行,評估 MPC 的魯棒性,并測試 MPC 與風力發電機現有自動化系統之間的集成,其中包括監控、安全系統和分析功能。
我們還運行了 SIL 測試,以評估 MPC 算法相對于常規 PID 控制器的性能。結果表明,當風機受到陣風影響時, MPC 算法在保持機械負載水平不變的情況下,比 PID 控制器保持了明顯更穩定的功率和發電機轉矩(圖 6)。這些結果證實了 MPC 具有同時處理多個控制目標的能力。
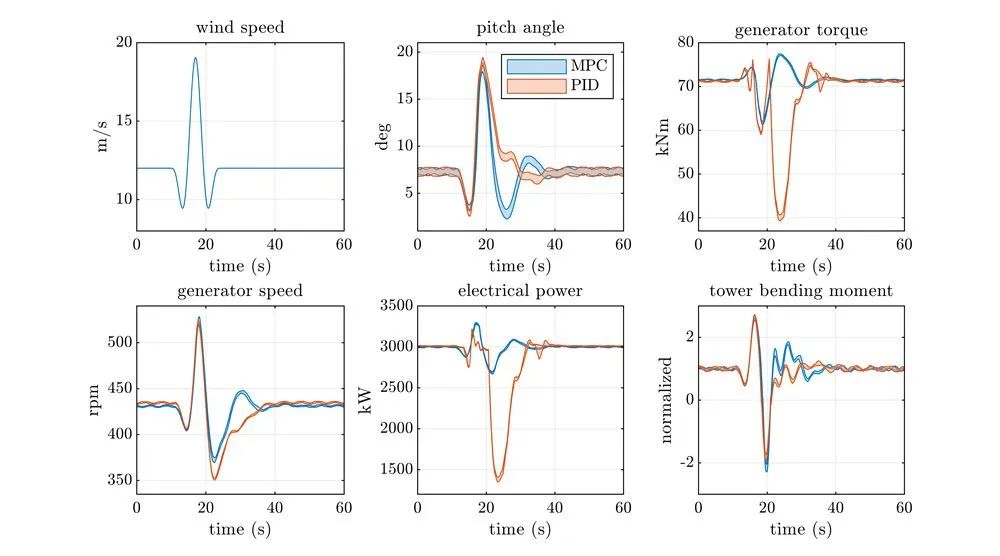
圖 6.IEC 61400 定義的極端工作陣風荷載情況下的 SIL 測試結果。藍色 = MPC 算法;紅色 = PID 控制器。(圖片來源:Dickler、Wintermeyer-Kallen、Konrad 和 Abel [5])
為了準備 HIL 測試,我們使用 Simulink Coder 和 M-Target for Simulink 從 Bachmann MH230 PLC MPC 模型生成代碼。在 HIL 測試期間,我們使用 PC 對風機對象進行仿真,重用了我們系統仿真中的降階 Simulink 模型或者 alaska/Wind 或 FAST 模型。這些測試使我們能夠在風力發電機的 PLC 上驗證 MPC 算法生成的代碼,并在包括實際風機自動化系統的硬件設置中驗證實現。
現場測試和后續步驟
憑借進行的系統仿真和全面的 SIL 和 HIL 測試,我們相信控制器將在實際風機上有相當出色的表現。在基于仿真的開發環境中成功地運行全面測試,使我們有信心在德國羅斯托克的 W2E 風力發電機上首次測試 MPC 算法。
首次測試的結果證實了我們的預期,因為 MPC 可以在不修改控制器的情況下在部分負載區域運行風力發電機。成功的現場測試是我們在 RWTH 和 W2E 的研究小組的一個重要里程碑,不僅驗證了 MPC 的設計和實現,也驗證了 WTCF。
現場測試為我們在全尺寸現場測試實際 3 兆瓦風力發電機的 MPC 系統建立了概念驗證,并彌合了多兆瓦級風力發電機 MPC 系統的控制設計和現場測試之間的差距。在測試期間,我們確定了控制器設計的幾個潛在改進領域。我們的近期計劃包括改進 MPC 算法來提高發電能力,同時通過增強 MPC 算法的魯棒性,進一步降低風機的疲勞負載和陣風帶來的極端負載。
在未來的研究中,我們計劃基于物理建模原理和機器學習算法開發更詳細的預測模型。這項研究將為考慮與小型風電場中電網兼容性和多物理風力發電機影響相關的其他控制目標開辟新的可能性。
致謝
我們要感謝參與 MPC 測試活動的 W2E Wind to Energy GmbH 的所有同事,感謝他們在實際風力發電機中調試 MPC 系統和現場測試方面提供的支持。我們還要感謝 Bachmann electronic GmbH 提供的技術支持,以及為進行現場測試和測試準備所提供的 MH230 PLC 單元。
關于作者
Dirk Abel 是亞琛工業大學自動控制研究所的負責人。Thomas Konrad 是能源系統工作組的負責人。Sebastian Dickler 和 Thorben Wintermeyer-Kallen 是風能研究小組的研究人員。
審核編輯 :李倩
-
控制器
+關注
關注
114文章
17071瀏覽量
183801 -
仿真
+關注
關注
52文章
4257瀏覽量
135627 -
發電機
+關注
關注
26文章
1685瀏覽量
69411
原文標題:風機現場測試中模型預測控制算法的開發和測試
文章出處:【微信號:MATLAB,微信公眾號:MATLAB】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
矩陣變換器——永磁同步發電機矢量控制系統
兆瓦超充已來,40kW模塊急需升級
高壓SiC針對電動汽車長途卡車運輸中的兆瓦級充電進行了優化

全球首臺20MW級蒸發冷卻半直驅永磁風力發電機成功下線

殼牌推出適用于卡車和船舶的兆瓦充電器-EAK零電感水冷制動電阻器-兆瓦級充放電
風力發電機有哪些類型?如何分類?
風力發電機由哪些結構組成?簡單分析
什么是風力發電機?它的工作原理是什么?
電弧光保護在風力發電機中的應用





 工商網監
工商網監
評論