 在沒有 MCU 的情況下實現兩軸機械臂控制器
在沒有 MCU 的情況下實現兩軸機械臂控制器
機械臂廣泛用于機器人應用中。它們可以做出類似于人手的動作。機器人手臂可以是一個獨立的應用程序,也可以是更大機器人系統的一部分。機械臂在工業中主要用于取放應用。它們也存在于移動安全攝像頭和玩具中。
機械臂通常由幾個連桿組成,這些連桿通過可以旋轉的關節連接起來。在這個項目中,我們將構建一個包含兩個旋轉關節的機械臂,一個用于 x 軸,另一個用于 y 軸。這些將由來自操縱桿的模擬信號控制。該電路將采用GreenPAK SLG46620 芯片、兩個 Tower Pro SG90 伺服電機和一個模擬操縱桿設計(圖 1 和圖 2)。
點擊查看完整大小的圖片

點擊查看完整大小的圖片
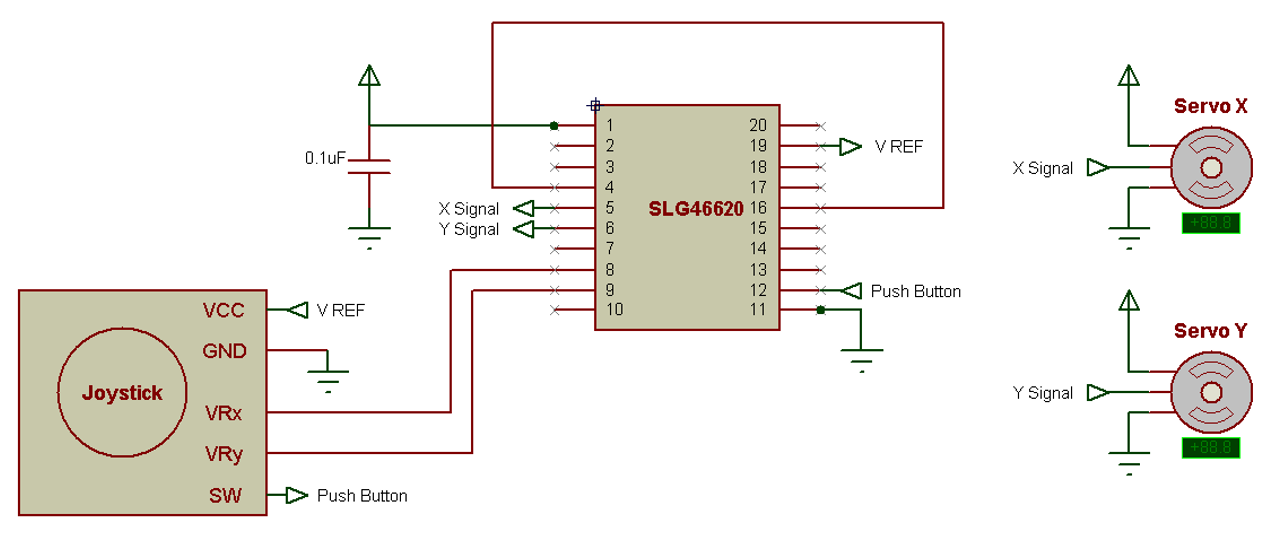
圖 2. 電路原理圖。(來源:瑞薩電子)
該項目不需要微控制器,因為 GreenPAK 芯片包含構建能夠獨立控制伺服電機的靜態 IC 所需的所有元素。
GreenPAK 芯片將執行系統的所有功能。它從操縱桿的 x 輸出接收模擬信號,該信號在內部被數字化并用作伺服電機的 PWM 信號。然后將輸入通道更改為從操縱桿的 y 輸出讀取,并重復該過程。模擬信號將每 10 ms 讀取一次,在 x 和 y 輸出之間交替。因此,每個信號每 20 ms 讀取一次,因此輸出頻率為 50 Hz。這適用于伺服電機的操作。
伺服電機
兩個 Tower Pro SG90 伺服電機(圖 3)將用于構建機器人手臂。電機需要一個 PWM 信號來控制其旋轉角度,從 0° 到 180° 不等。當引入 0.5 ms 脈沖寬度時,電機旋轉到 0°。當脈沖寬度等于 2.5 ms 時,電機旋轉 180°。因此,脈沖寬度必須在每 20 ms 0.5 – 2.5 ms 之間,以獲得 0° 和 180° 之間的角度。

圖 3. Tower Pro SG90 伺服電機。(來源:瑞薩電子)
模擬操縱桿
模擬操縱桿因其價格低廉且易于連接而廣泛用于機器人應用。操縱桿由兩個交叉放置的電位器組成(圖 4)。它提供三個輸出:x、y 和中間的按鈕。我們應用程序中的操縱桿將提供伺服系統的手動控制。
為了獲得適合 GreenPAK ADC 規格的范圍,操縱桿將使用芯片的 VREF,而不是連接外部分壓器。這將減少外部零件的數量。

圖 4. 模擬操縱桿模塊。(來源:瑞薩電子)
GreenPAK 設計
GreenPAK 設計是在免費的基于 GUI 的GreenPAK Designer 軟件中創建的,它是 Go Configure? 軟件中心的一部分(鏈接到設計文件)。該設計由幾個部分組成(圖 5)。
點擊查看完整大小的圖片
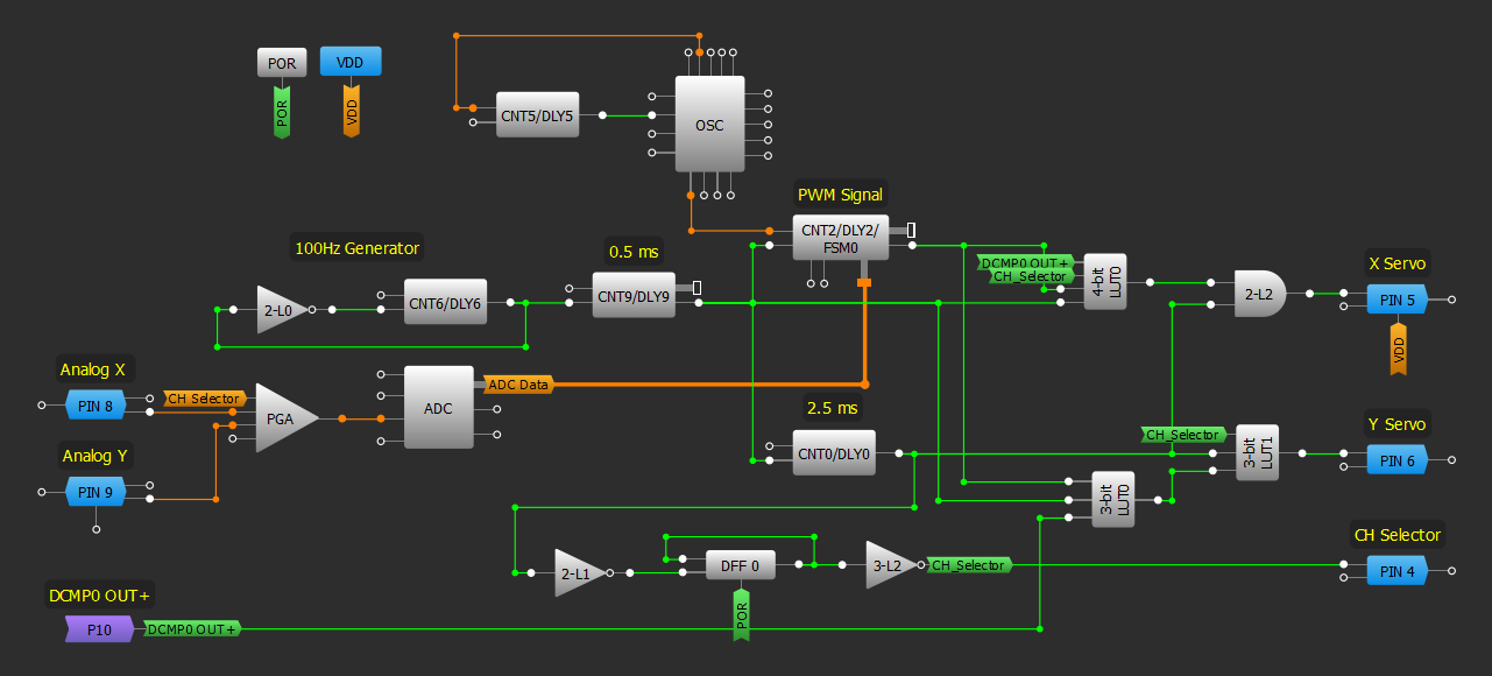
圖 5. GreenPAK 設計 - 矩陣 0。(來源:瑞薩電子)
模擬 MUX 根據定義的時間間隔接收來自兩個不同輸出的信號。100 Hz 的脈沖發生器每 10 ms 發出一個脈沖。在前 10 ms 接收 x 信號,在接下來的 10 ms 接收 y 信號。
Pin8 和 Pin9 配置為連接到配置為模擬多路復用器的 PGA 的模擬輸入。來自 Pin16 的信號在其兩個通道之間切換。當信號 CH Selector 設置為 HIGH 時,讀數來自 Pin8,當設置為 LOW 時,讀數來自 Pin9。模擬信號轉換為數字信號后,從 FSM0 中讀取。FSM0 從 ADC 模塊的輸出(ADC 數據)獲取其輸入。FSM0 配置為下降沿 DLY。
延遲時間=(計數器值+1)/時鐘。
時鐘 = 256/2ms = 128kHz
FSM0 的 CLK 管腳通過 EXT CLK0 連接到 CNT5 輸出以獲得 128 kHz,因此當從 ADC 接收到 255 的值時,輸出的脈沖寬度為 2 ms。因此,CNT5 的輸出周期為 7.8125 μs,CNT5 數據為 210。
2-L0 逆變器和 CNT6 定義了 100 Hz 發生器,它每 10 ms 發出一個脈沖,以便每 20 ms 向兩個伺服電機輸出 PWM 信號。發生器的輸出觸發 CNT9,它被配置為下降沿 DLY,延遲時間為 0.5 ms。CNT9 輸出觸發 FSM0 輸出一個寬度為 FSM 數據 + 0.5 的信號,該信號將在 0.5 和 2.5 ms 之間。這通過 LUT 傳遞到合適的伺服系統。
CNT0 用于在每個工作周期提供 2.5 ms 的脈沖寬度,作為將信號輸出到伺服電機(每個依次)以防止任何錯誤的最大允許時間范圍。
DFF0、2-L1、3-L2 用于控制輸入通道,其中每 10 ms 在 PGA 的通道 1 和 2 之間進行周期性切換。Pin6 外部連接到 Pin16,該 Pin16 鏈接到 PGA 的 CH 選擇器引腳。
4 位 LUT0、3 位 LUT0、3 位 LUT1 和 2-L2 構成解復用器,將 PWM 信號傳遞給請求的伺服電機(圖 6)。
點擊查看完整大小的圖片
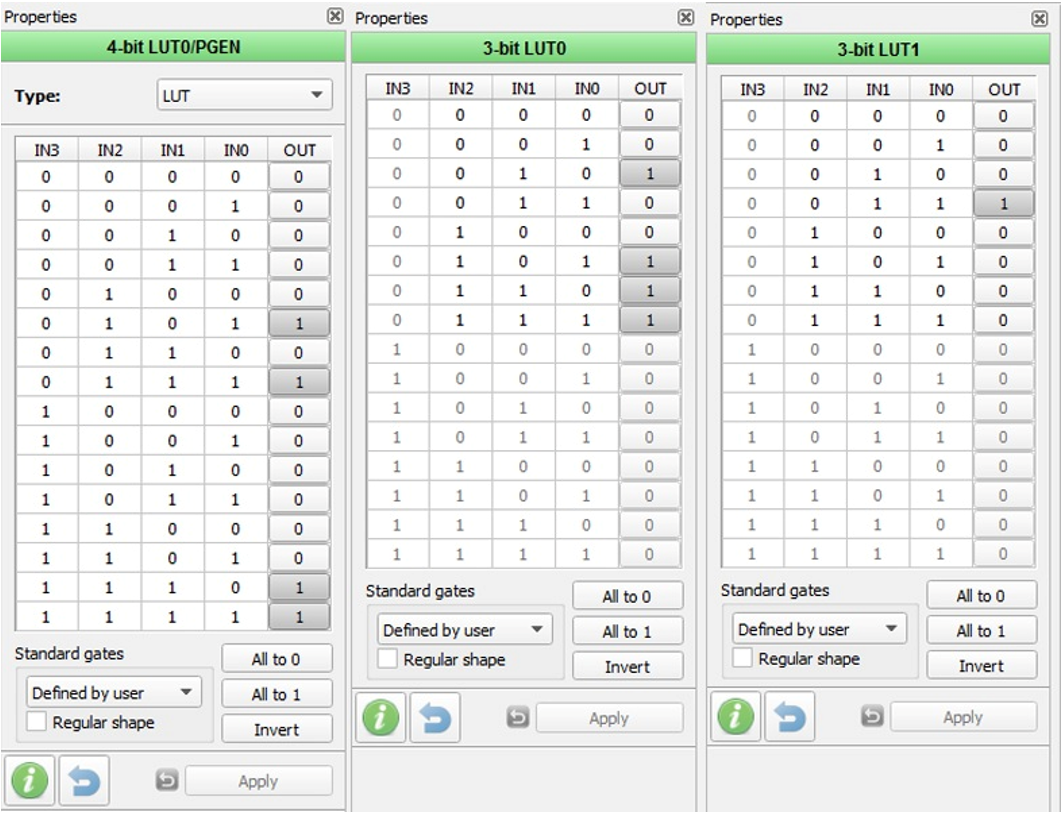
圖 6. LUT 配置。(來源:瑞薩電子)
當 CH Selector 信號為 HIGH 時,讀數來自通道 1 通過 Pin8,修改后的 PWM 信號通過 Pin4 傳遞到 x – 伺服電機。當 CH 選擇器設置為 LOW 時,讀數來自通道 2,信號傳遞到 Pin5,然后傳遞到 y - 伺服電機。
從周期開始經過 2.5 ms 后,通道隨著 CNT0 輸出的下降沿而改變,以在下一個周期開始時輸出脈沖(參見圖 7)。這為信號讀取和穩定性提供了充足的時間。
點擊查看完整大小的圖片
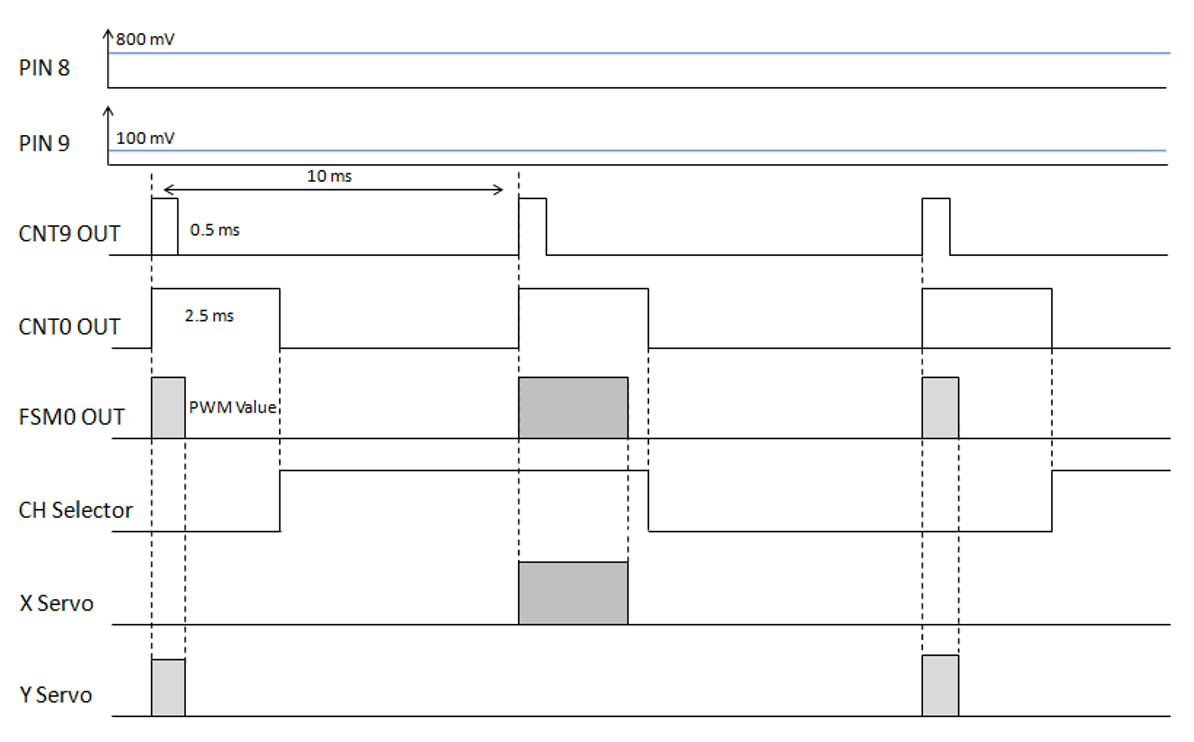
圖 7.時序圖。(來源:瑞薩電子)
為防止在信號較小(小于 40 mV)時 ADC 出現任何錯誤,DCMP0 用于將 ADC 值與寄存器 0 進行比較。如果值小于 9,角度將被視為 0°,輸出CNT9 將直接傳遞給請求的伺服電機。
操縱桿來自 GreenPAK 芯片內部的 VREF0,因此操縱桿讀取的信號在 ADC 的工作范圍內。VREF0 連接到 Pin19,其中源選擇器設置為 ACMP0,調整為 1200 mV。操縱桿包含一個可用于附加功能的按鈕。使用 CNT8 構建去抖動器,改進后的信號通過 Pin20 輸出。Pin12 配置為低壓數字輸入,因為操縱桿電壓為 1200 mV(圖 8)。
點擊查看完整大小的圖片
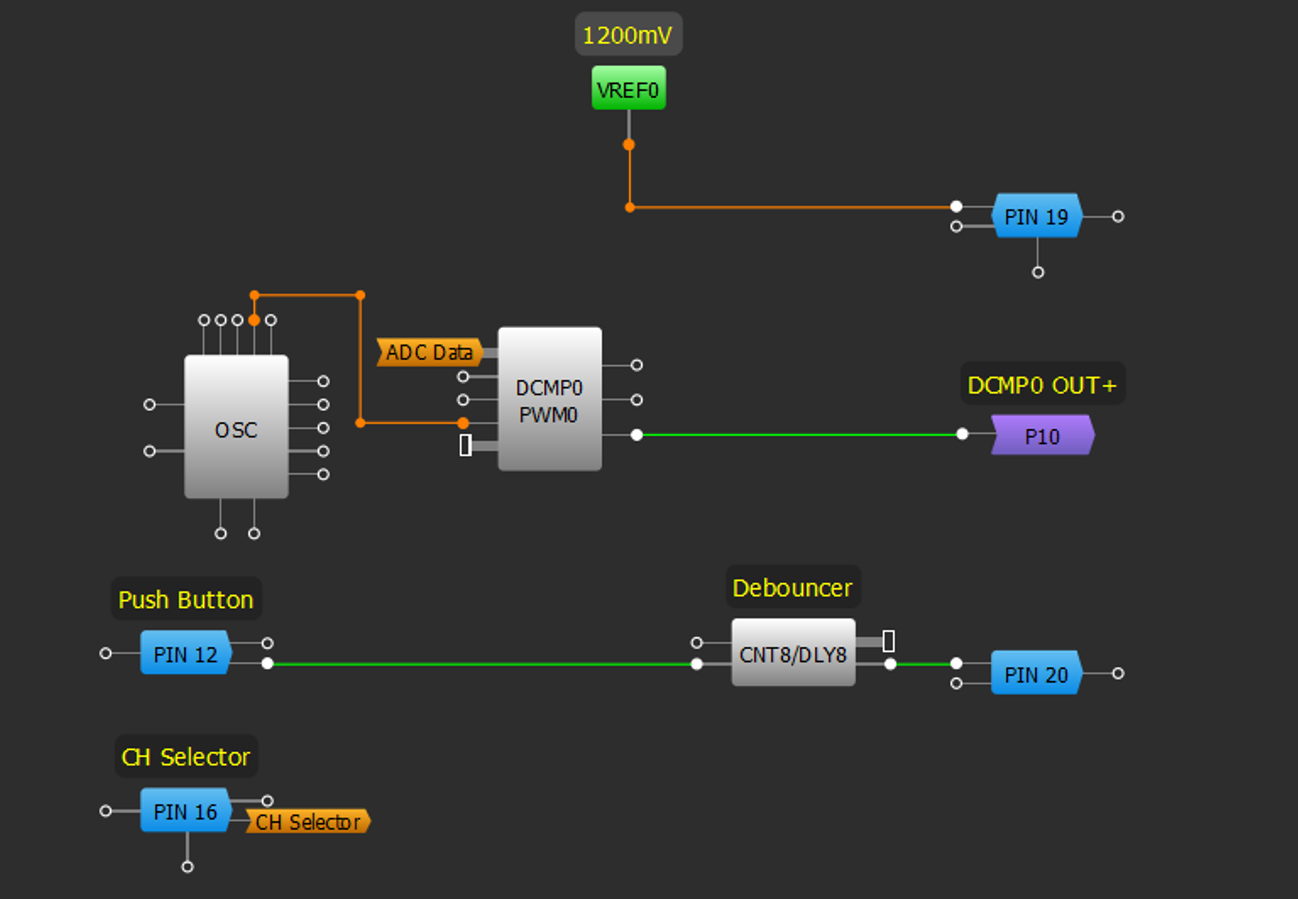
圖 8. GreenPAK 設計 – 矩陣 1。(來源:瑞薩電子)
為了測試設計,GreenPAK Designer 的信號向導用于將不同的信號應用于輸入(圖 9)并監控輸出(圖 10)。
點擊查看完整大小的圖片
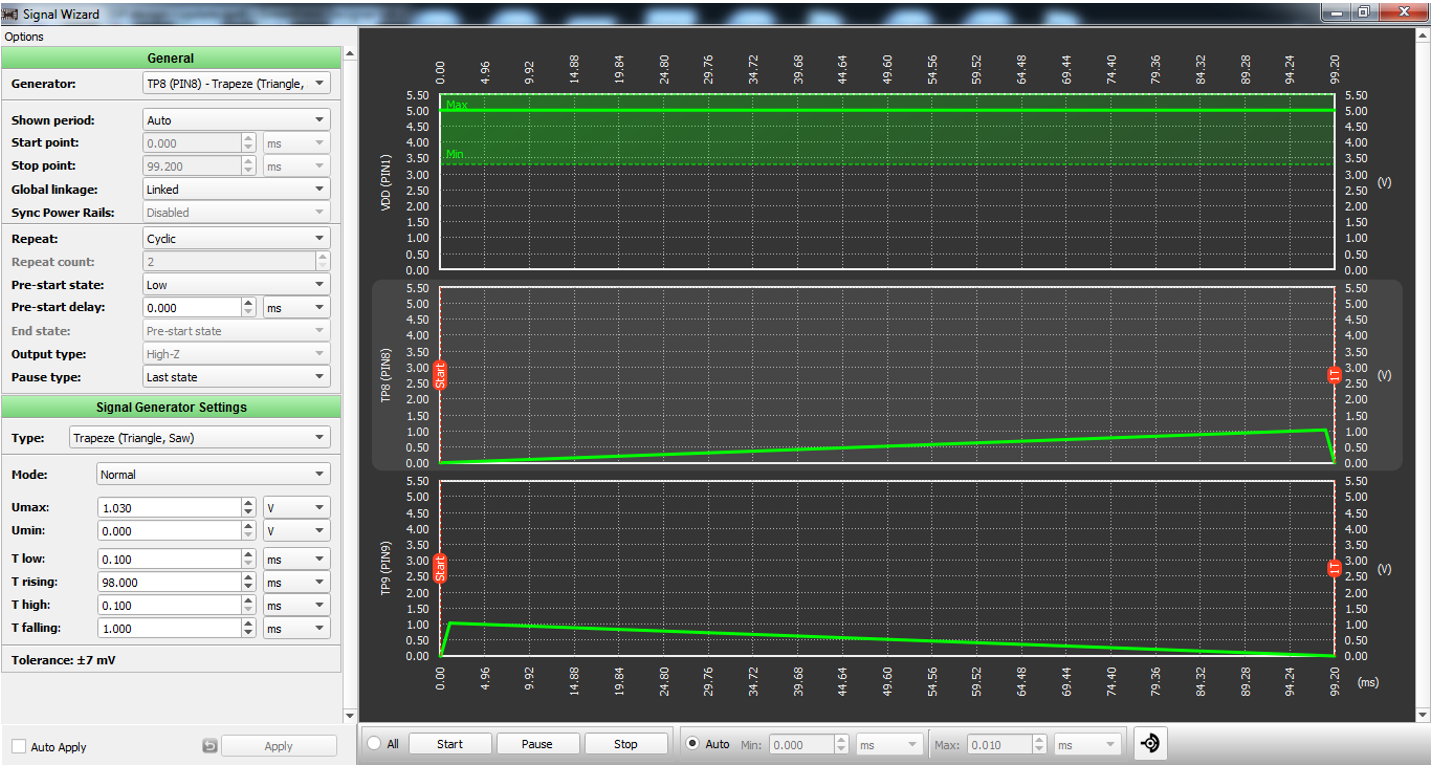
圖 9. 生成鋸齒波。(來源:瑞薩電子)
點擊查看完整大小的圖片
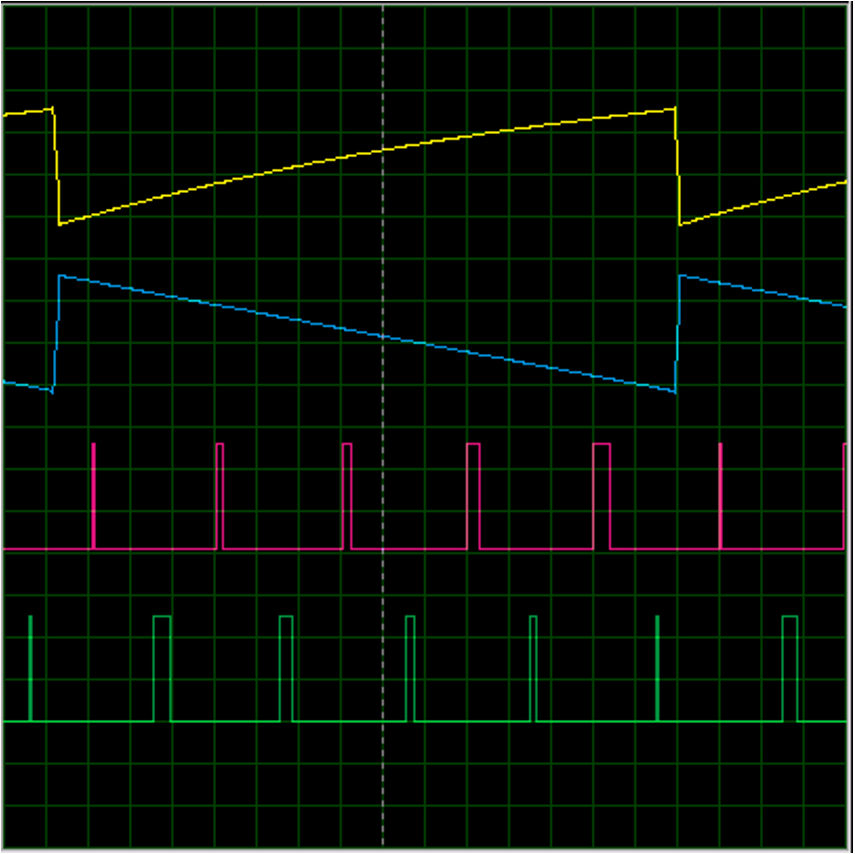
圖 10. Pin8(黃色)、Pin9(藍色)、Pin5(紅色)和 Pin6(綠色)。(來源:瑞薩電子)
以下視頻顯示了工作項目,也可在此處獲得。
結論
在本文中,我們使用 GreenPAK SLG46620 芯片構建了一個電路,該電路使用兩個通過模擬操縱桿操作的伺服電機來控制兩個關節 x 和 y 的機器人手臂。該芯片高效地將所有電路的重要元件集成在一個小空間內。不需要外部微控制器,并且只需要很少的外部元件。
通過連接多個芯片,這種設計可以擴展為構建自由度更大的機器人手臂。這樣的系統可以應用于許多不同的工業應用。
審核編輯 黃昊宇
-
mcu
+關注
關注
146文章
17423瀏覽量
353648 -
控制器
+關注
關注
113文章
16543瀏覽量
180161 -
機械臂
+關注
關注
12文章
528瀏覽量
24831
發布評論請先 登錄
相關推薦
如何使用PLC控制myCobot 320機械臂

在VDD1沒有供電的情況下,VDD2正常供電的情況下,AMC1200的輸出應該是什么狀態?
PCM4222如何通過PCMEN在不RST情況下控制PCM輸出控制?
plc什么情況下會導致程序丟失
想在RainMaker的例程加上BLE本地控制,如何在沒有wifi的情況下也能控制設備?
基于六維力傳感器的機械臂自動裝配應用

電機控制器驅動板, 遇到報desaturation故障的兩種情況怎么解決?
自然語言控制機械臂:ChatGPT與機器人技術的融合創新(下)

EtherCAT運動控制器在ROS上的應用開發案例(下)








 工商網監
工商網監
評論