 PythonRobotics-自主機器人導航
PythonRobotics-自主機器人導航
這個系列的文章是之前Python實現所有算法的兄弟篇,眼看著夏令營完事,我也要又開始學習日子了:
若干篇,大家可以看以前的文章
我思來想去,決定深耕機器人領域,又大又深。雖然現在的算法大部分都可以找到,但是沒有一個集成的項目來做,這個PR的項目首先是保證了可視化的操作,我想沒人不愛可視化吧。其次就是算法的齊全:
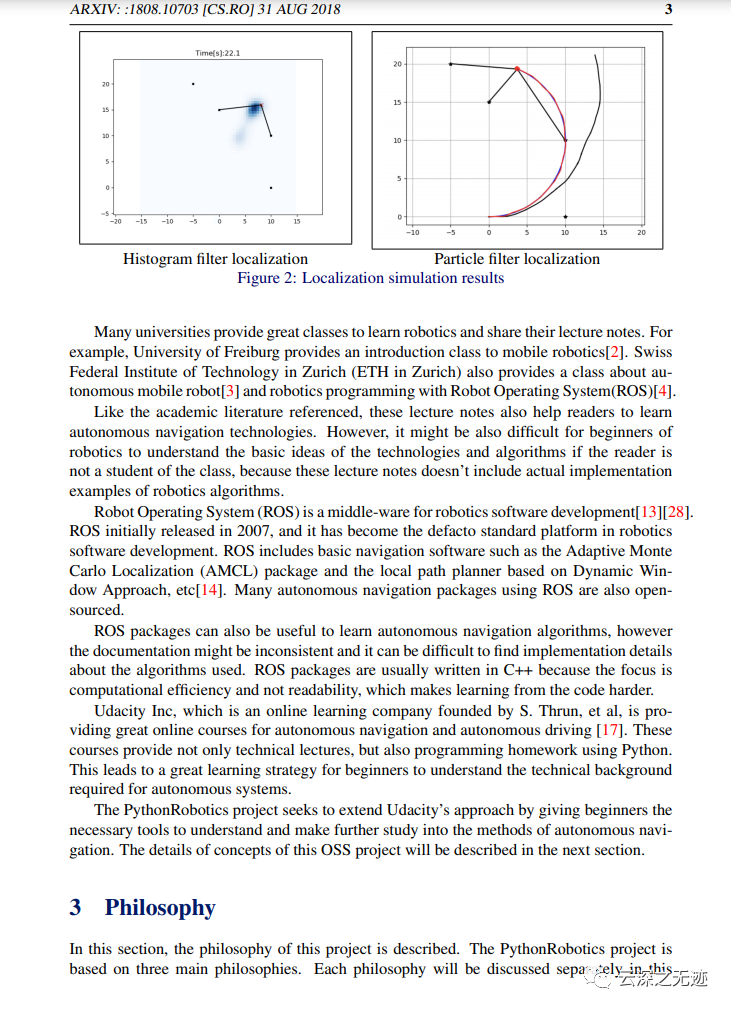
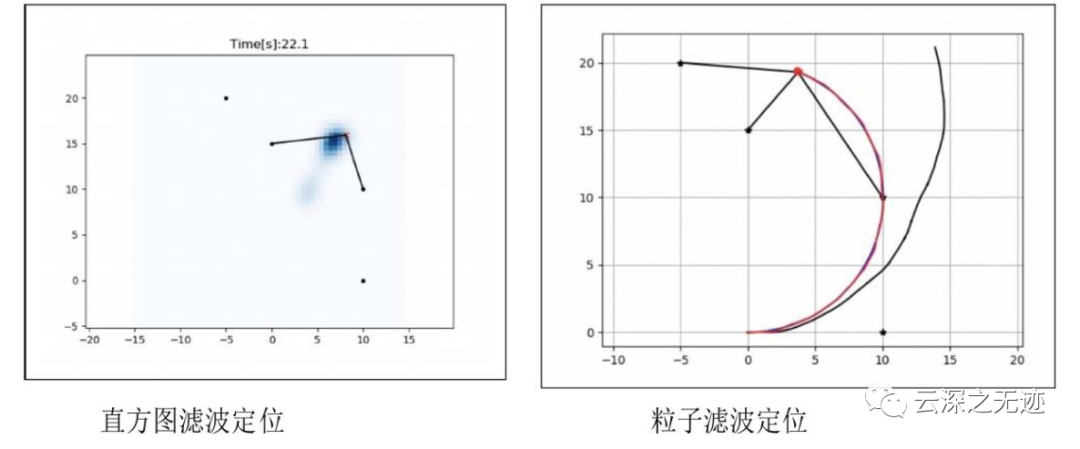
常見的定位算法
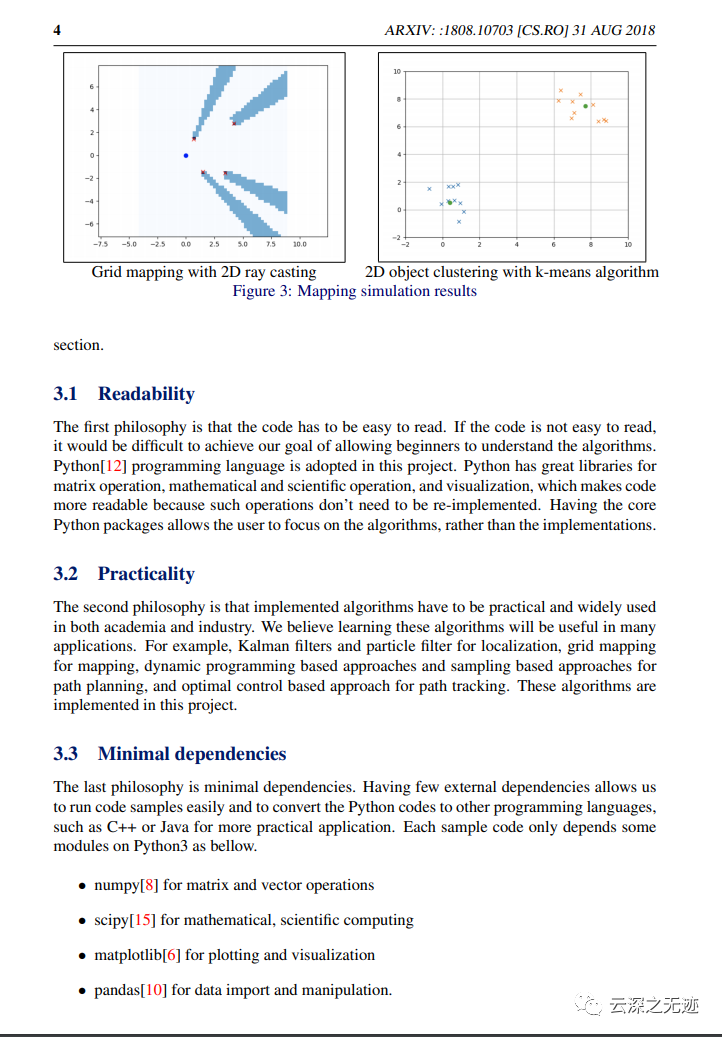
地圖繪制
點云配準
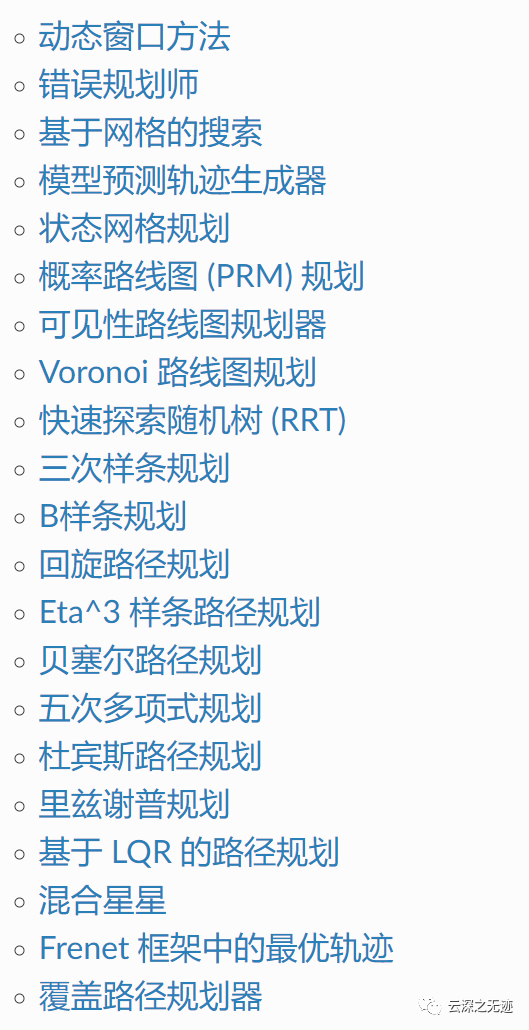
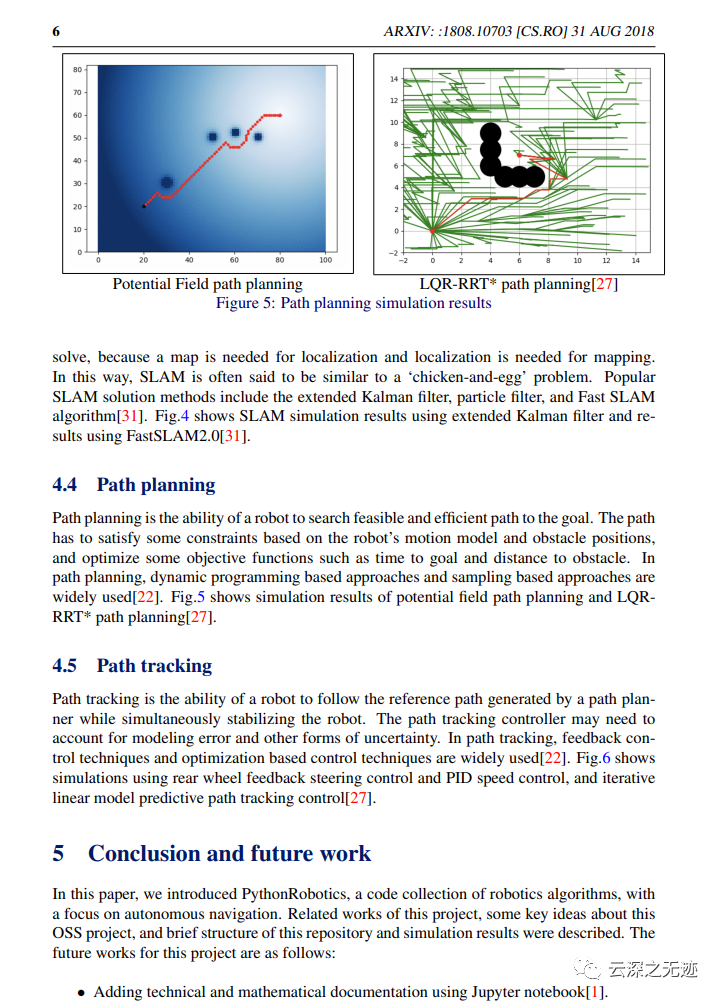
路徑規劃
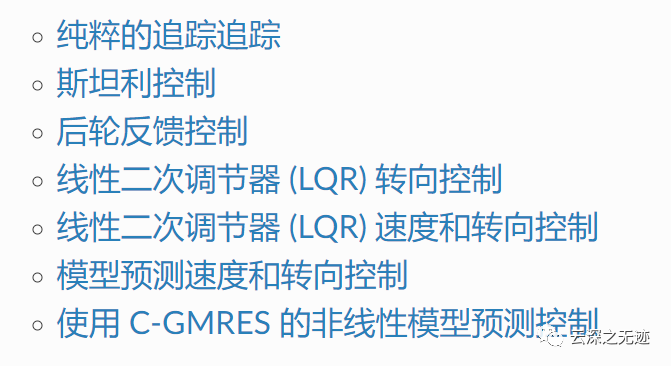
路徑追蹤
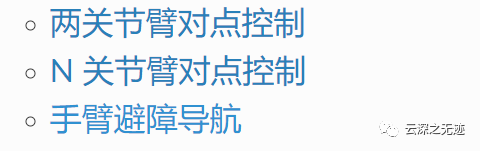
機械臂等等
對于代碼庫,作者還編制了一個doc
安裝庫以后,這里把依賴的庫安裝一下:
pip install -r requirements/requirements.txt
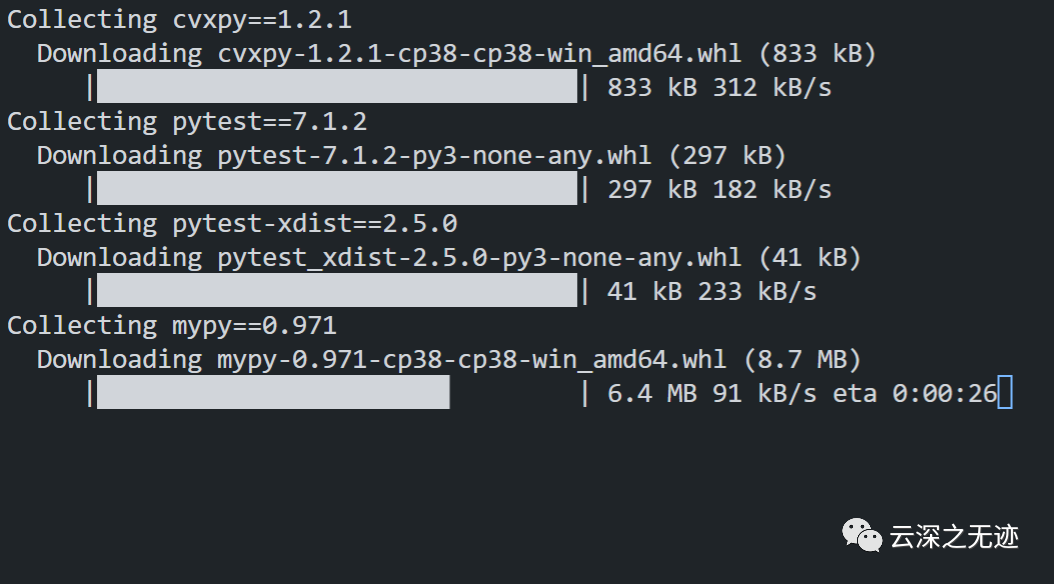
會把使用的全安裝
測試一下這個怎么樣,注意是使用Python的終端
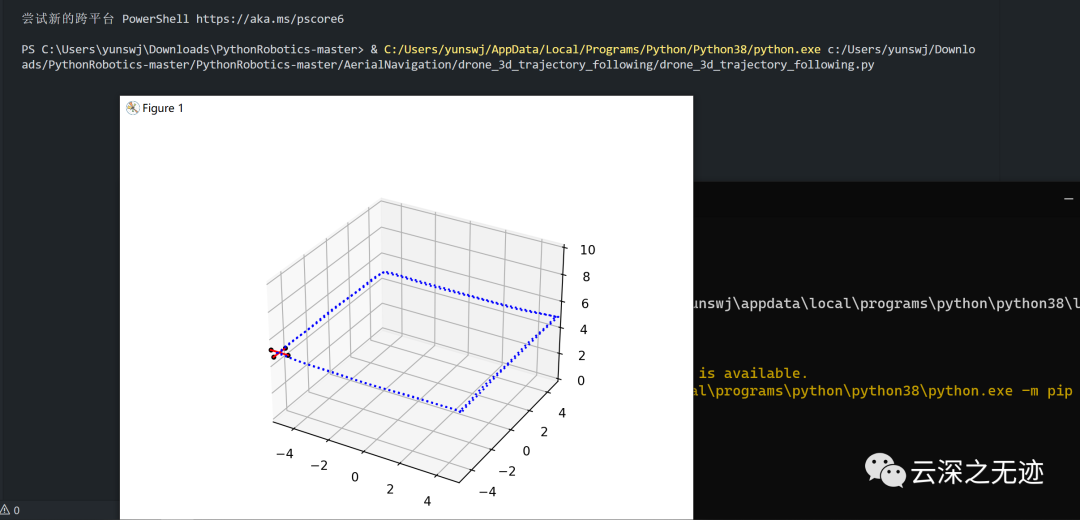
運行的很OK
除此之外,還搞了一篇論文,原文在最后:
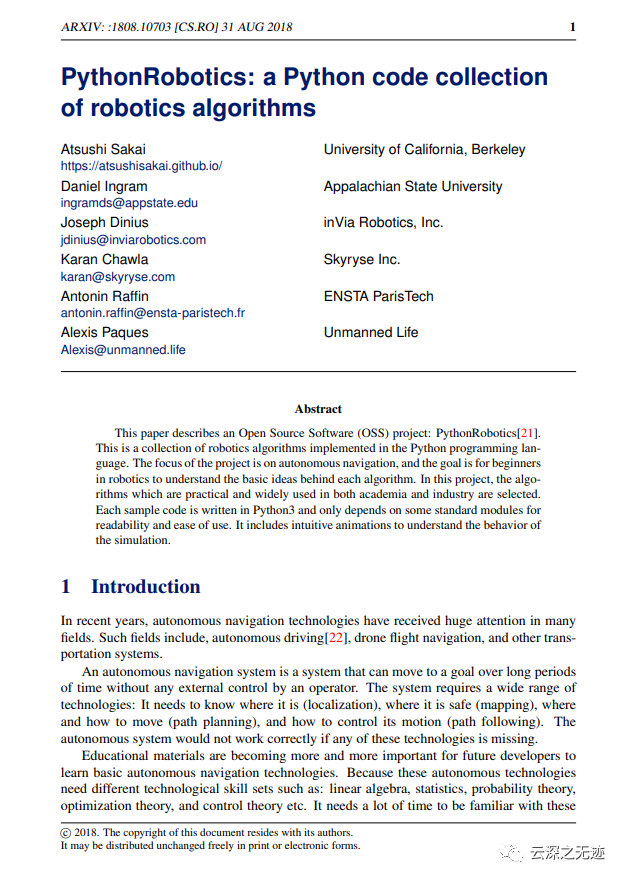
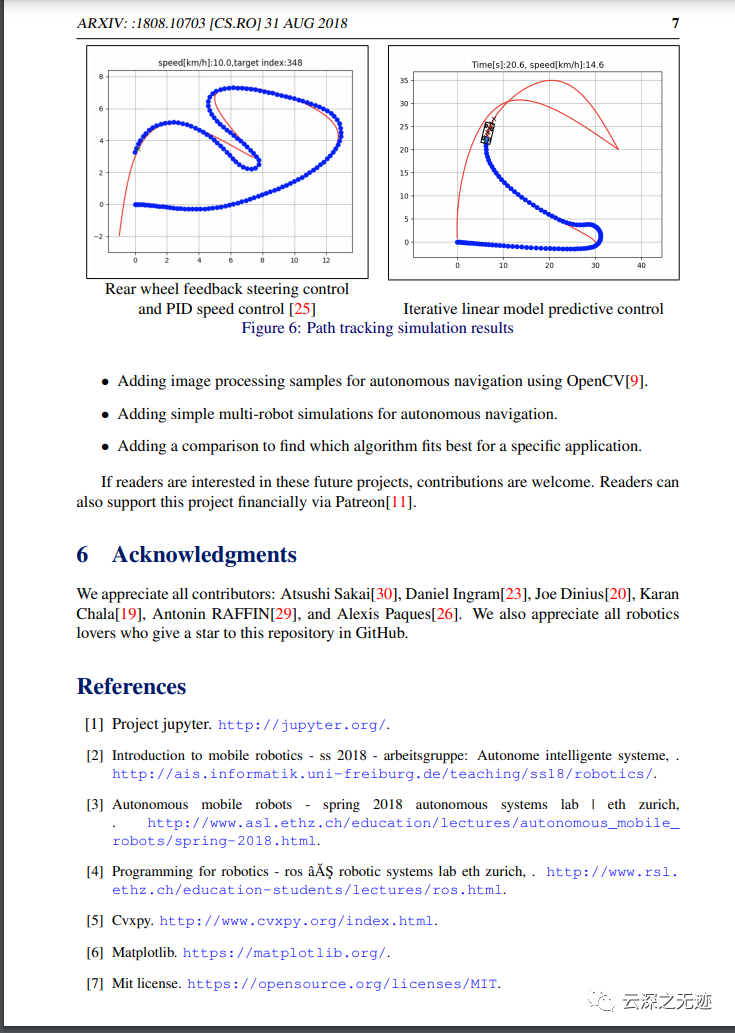
看不懂英文的意思?我給你翻譯一下,近年來自主的導航技術在很多的領域都大受關注,這個系統是指,在不受操作者控制的情況下,能夠長時間的向目標移動的系統,首先是需要知道自己在哪里,那些地方是安全的,去這個安全的地方該如何去,以及如何控制自己的運動。如果缺少任意一個,都是不可以的。可能太大白話了,定位,映射,路徑規劃,路徑跟隨。但是熟悉這些東西需要大量的不同的技能集合,線性代數,統計學,概率論,優化理論,控制理論等等。而且學習這些還得良好的教育資源,那么這個項目就是為了為這個美好的愿望來添磚加瓦,他有很多的模擬動畫,有助于讀者來了解之后的基本思想。
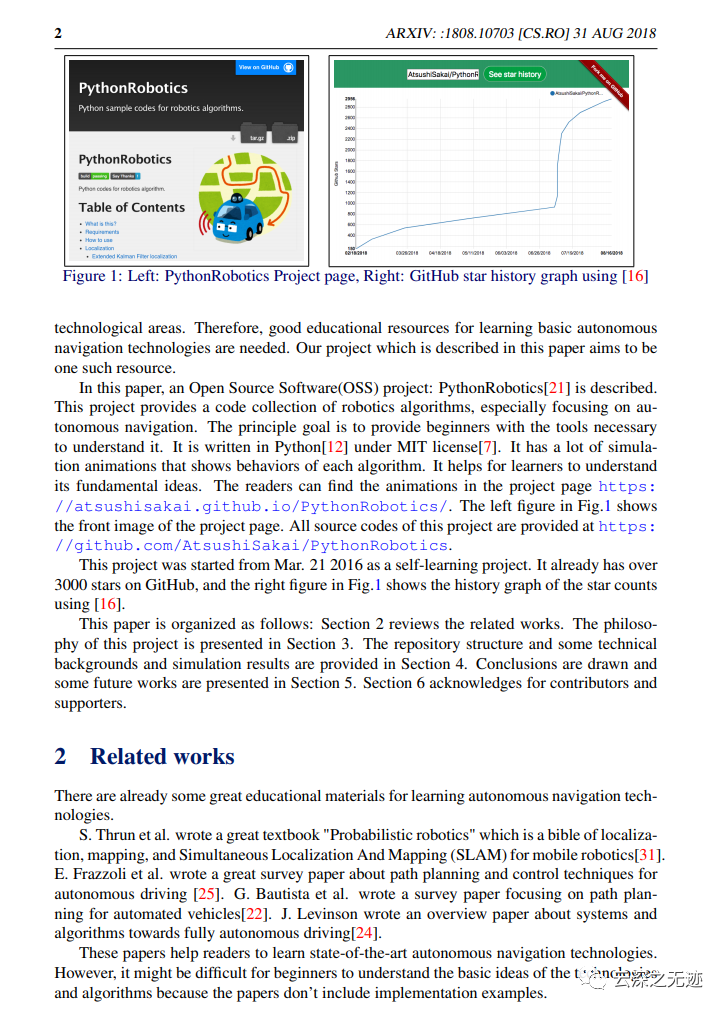
還是繼續說,雖然可以找到很多的資料,但是對于一個初學者還是不能很好的來了解算法的思路。
項目按照可讀性,就是代碼易于閱讀,實用性,算法必須具有實用性,就是在學術界和工業界得到廣泛的應用,最后就是最小的依賴關系,很少的外部依賴可以讓我們輕松的運行代碼的demo。這就是庫的三個重要特征。
在文章的后面我想寫一下這個庫的組織方式:
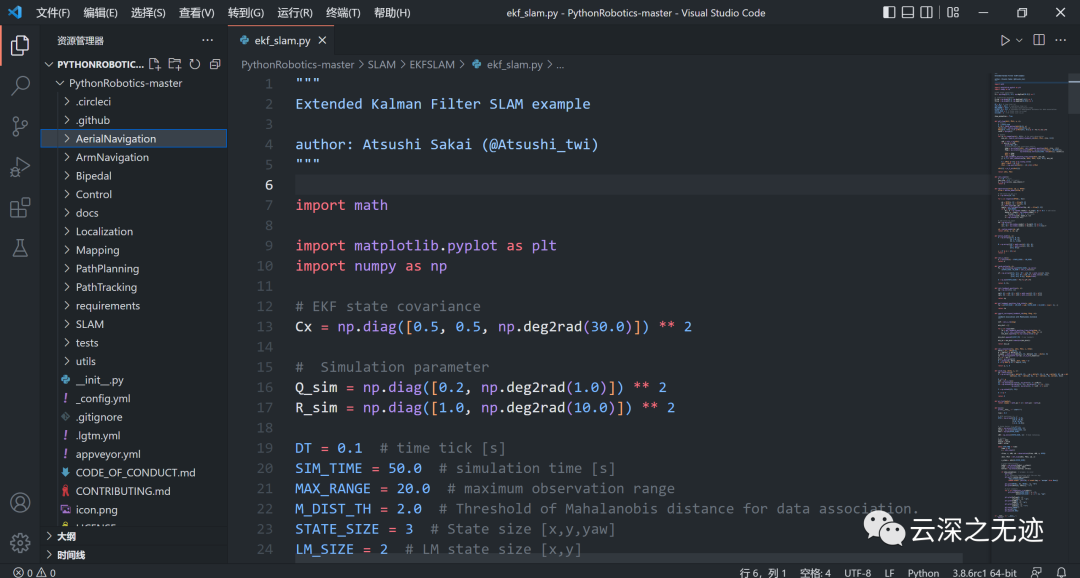
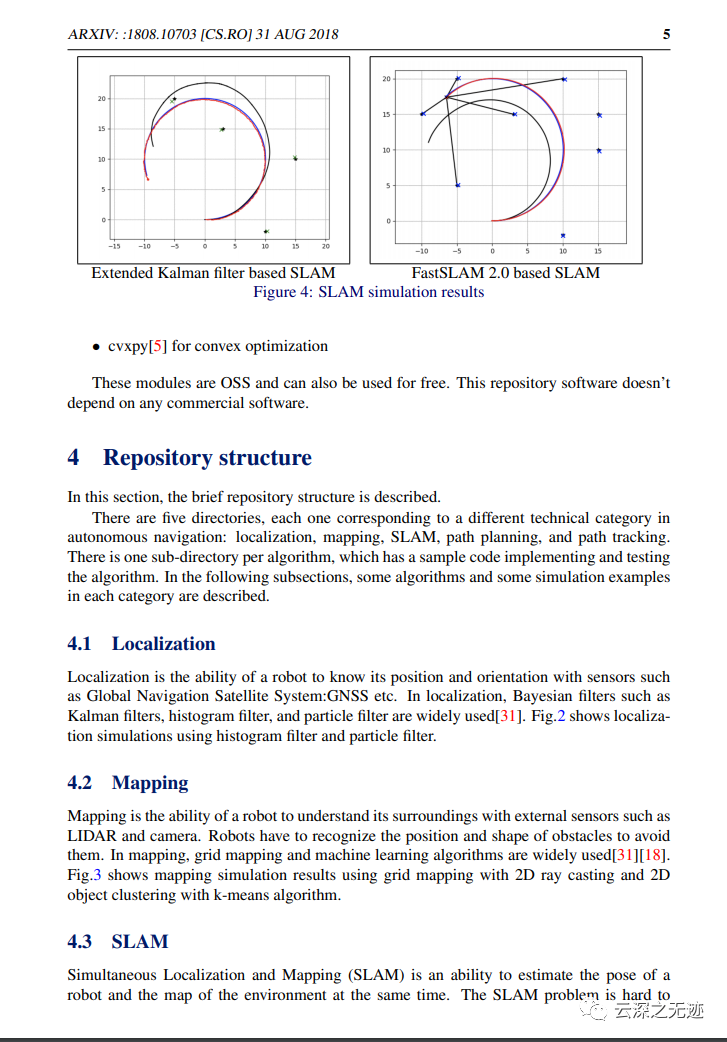
按照大的技術類別分為:定位,映射,SLAM,路徑規劃和路徑跟蹤。然后我會簡單的介紹一下這幾個的作用,定位是通過各種傳感器來確定自己的位置和方向的能力。映射也可以稱為測繪的能力,機器人需要了解環境,可以設別障礙物的位置和形狀,才能避開障礙物。SLAM是一種更加好的辦法,可以同時估計機器人的姿態和環境地圖的能力,但是它難以求解,因為定位需要地圖,映射需要定位,這樣看就好像是先有雞還是先有蛋的問題。路徑規劃是機器人尋找可行高效的路徑到達目標的能力,路徑必須要根據機器人的運動模型和障礙物位置滿足一些約束條件,并優化目標的時間和到障礙物的距離等一些目標函數。
現在就安裝這些庫就好,最后一個是一個優化的庫。
CVXPY 是一種用于凸優化問題的開源 Python 嵌入式建模語言。它可以讓您以一種遵循數學的自然方式表達您的問題,而不是求解器所需的限制性標準形式。
因為要不停的看各種API,劃詞翻譯這個瀏覽器插件也值得擁有~
概率機器人,這個書你看過嗎?如果看過的話,這個庫是練習的解決方案
https://github.com/pptacher/probabilistic_robotics
https://fanyi.youdao.com/
https://arxiv.org/ftp/arxiv/papers/1808/1808.10703.pdf
https://github.com/AtsushiSakai/PythonRobotics
https://www.cvxpy.org/
審核編輯 :李倩
-
機器人
+關注
關注
213文章
29568瀏覽量
211976 -
可視化
+關注
關注
1文章
1250瀏覽量
21702 -
python
+關注
關注
56文章
4825瀏覽量
86381
原文標題:PythonRobotics-自主機器人導航
文章出處:【微信號:TT1827652464,微信公眾號:云深之無跡】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
盤點#機器人開發平臺
詳細介紹機場智能指路機器人的工作原理
【「# ROS 2智能機器人開發實踐」閱讀體驗】視覺實現的基礎算法的應用
【「# ROS 2智能機器人開發實踐」閱讀體驗】+內容初識
復合機器人是通過什么導航方式?
研華科技加速智能自主系統與機器人應用發展
慣性測量單元傳感器在自主移動機器人的應用

機器人“大腦+小腦”范式:算力魔方賦能智能自主導航
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
移動機器人核心科技解碼:導航、感知與掌控力的深度剖析
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
【「具身智能機器人系統」閱讀體驗】1.全書概覽與第一章學習
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
安防巡檢機器人:守護安全的智能衛士






 工商網監
工商網監
評論