") 常用的標(biāo)定方法:九點標(biāo)定
常用的標(biāo)定方法:九點標(biāo)定
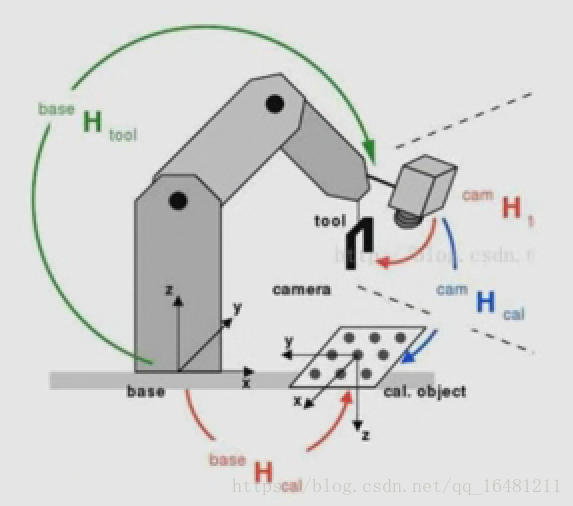
所謂手眼系統(tǒng),就是人眼鏡看到一個東西的時候要讓手去抓取,就需要大腦知道眼鏡和手的坐標(biāo)關(guān)系。如果把大腦比作B,把眼睛比作A,把手比作C,如果A和B的關(guān)系知道,B和C的關(guān)系知道,那么C和A的關(guān)系就知道了,也就是手和眼的坐標(biāo)關(guān)系也就知道了。
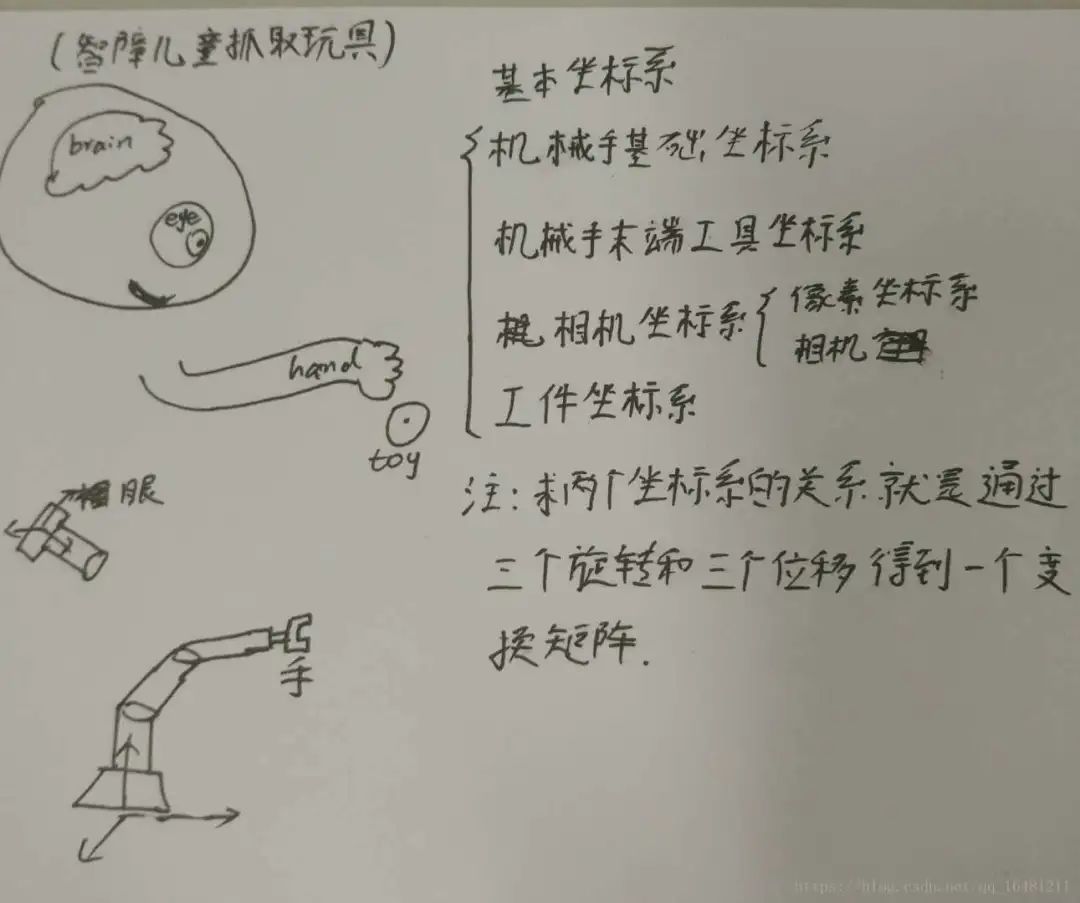
相機知道的是像素坐標(biāo),機械手是空間坐標(biāo)系,所以手眼標(biāo)定就是得到像素坐標(biāo)系和空間機械手坐標(biāo)系的坐標(biāo)轉(zhuǎn)化關(guān)系。
在實際控制中,相機檢測到目標(biāo)在圖像中的像素位置后,通過標(biāo)定好的坐標(biāo)轉(zhuǎn)換矩陣將相機的像素坐標(biāo)變換到機械手的空間坐標(biāo)系中,然后根據(jù)機械手坐標(biāo)系計算出各個電機該如何運動,從而控制機械手到達指定位置。這個過程中涉及到了圖像標(biāo)定,圖像處理,運動學(xué)正逆解,手眼標(biāo)定等。
常用的標(biāo)定方法有:九點標(biāo)定
九點標(biāo)定:
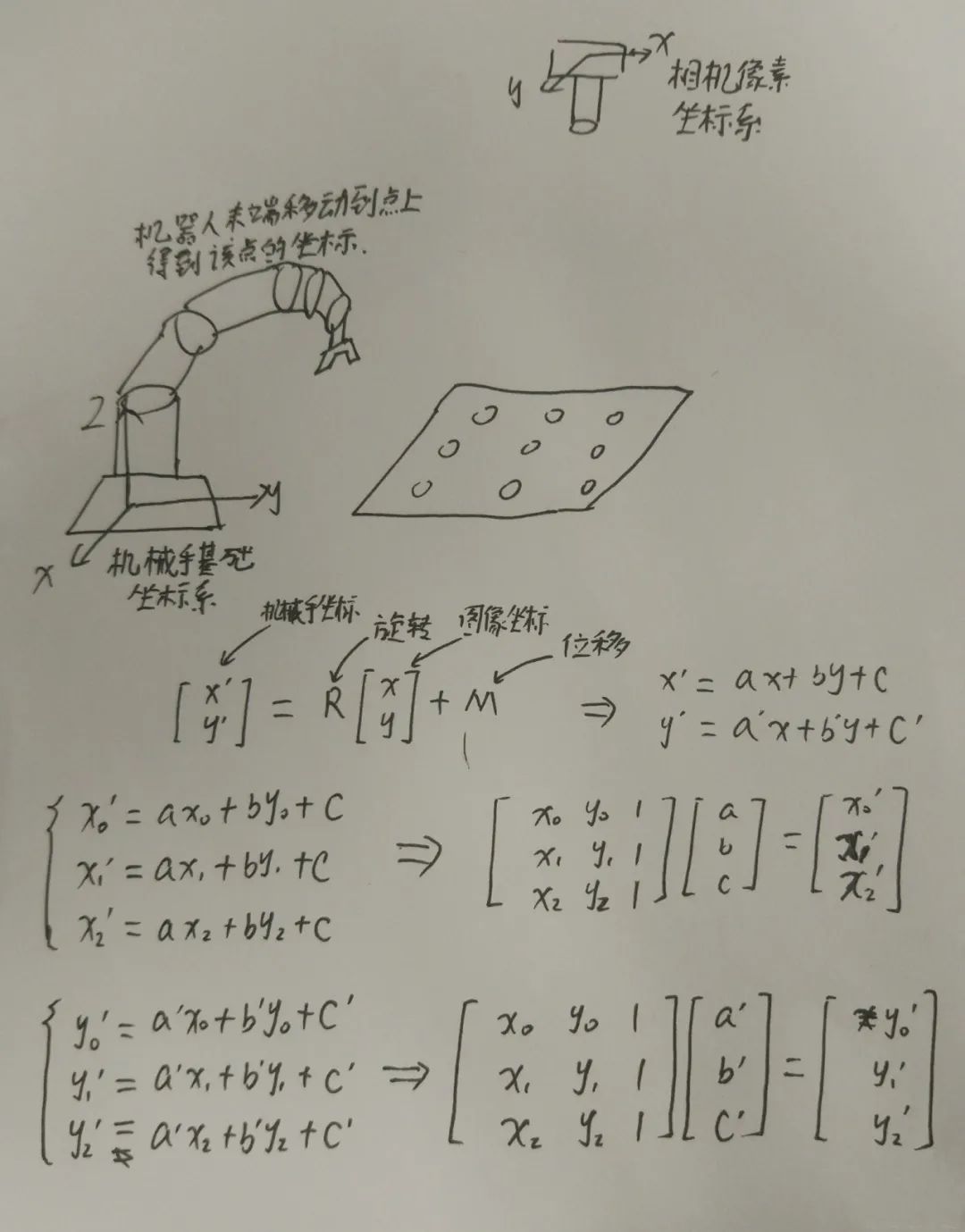
九點標(biāo)定直接建立相機和機械手之間的坐標(biāo)變換關(guān)系。
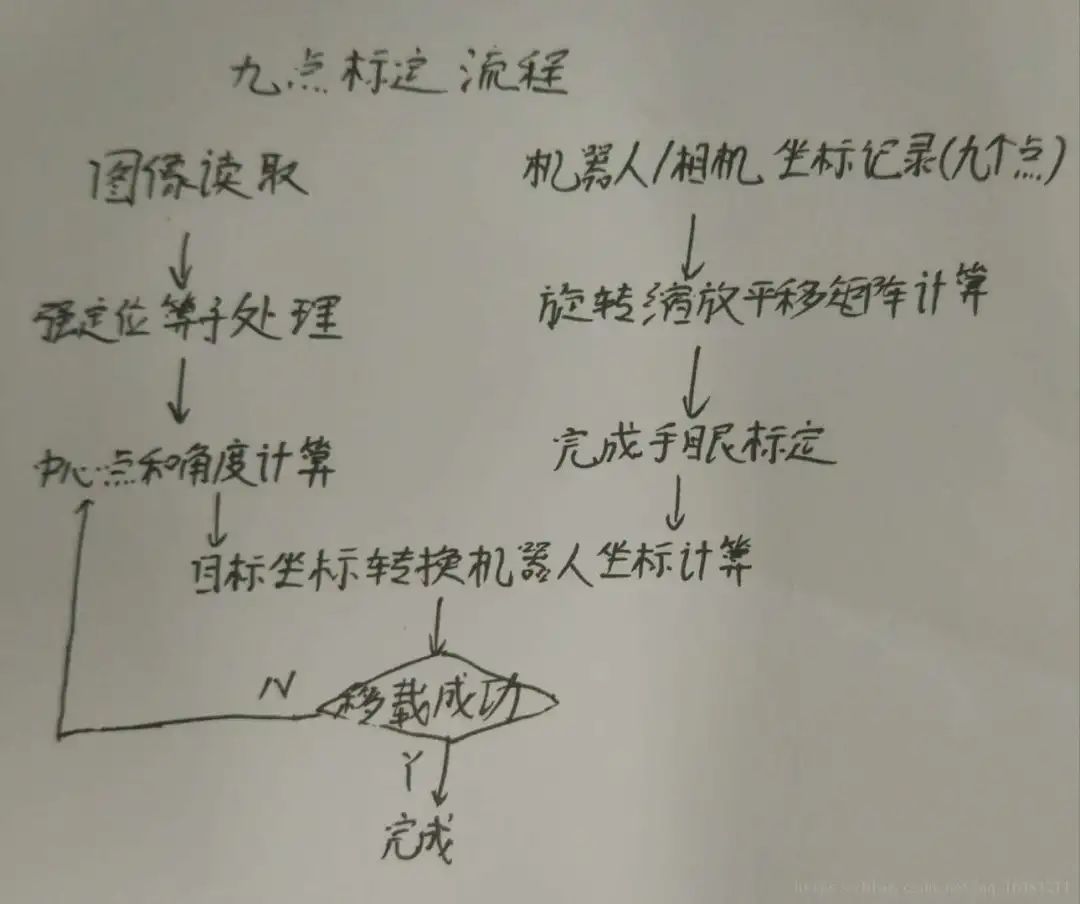
讓機械手的末端去走這就9個點得到在機器人坐標(biāo)系中的坐標(biāo),同時還要用相機識別9個點得到像素坐標(biāo)。這樣就得到了9組對應(yīng)的坐標(biāo)。
由下面的式子可知至少需要3個點才能求出標(biāo)定的矩陣。
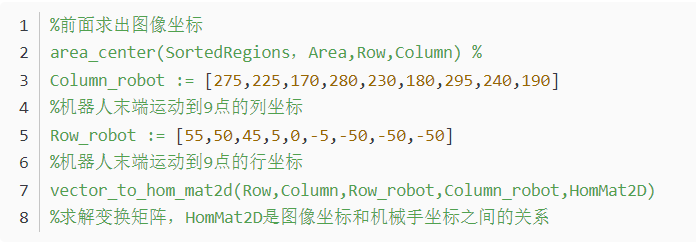
(1)、標(biāo)定,Halcon中進行9點標(biāo)定的算子
(2)、求解

一些特殊情況的解釋:
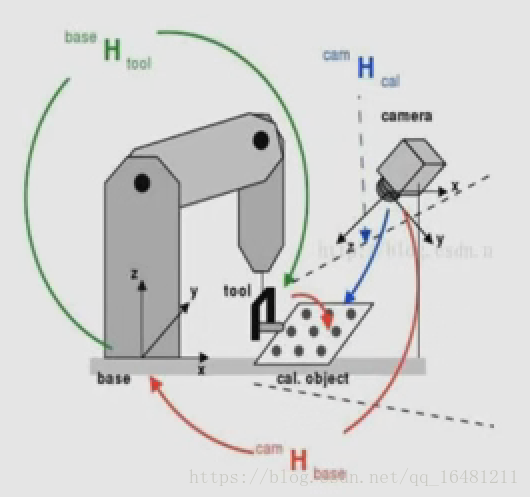
有些情況中我們看到相機固定在一個地方,然后拍照找到目標(biāo),控制機械手去抓取,這種就很好理解。我們也叫做eye-to-hand
還有一種情況是相機固定在機械手上面,這種情況的標(biāo)定過程實際上和相機和機械手分離的標(biāo)定方法是一樣的,因為相機拍照時,機械手會運動到相機標(biāo)定的時候的位置,然后相機拍照,得到目標(biāo)的坐標(biāo),再控制機械手,所以簡單的相機固定在末端的手眼系統(tǒng)很多都是采用這種方法,標(biāo)定的過程和手眼分離系統(tǒng)的標(biāo)定是可以相同對待的。我們也叫做eye-in-hand
審核編輯 :李倩
-
機器人
+關(guān)注
關(guān)注
213文章
29498瀏覽量
211570 -
機械手
+關(guān)注
關(guān)注
7文章
344瀏覽量
30211 -
標(biāo)定
+關(guān)注
關(guān)注
0文章
17瀏覽量
7595
原文標(biāo)題:九點標(biāo)定
文章出處:【微信號:機器視覺沙龍,微信公眾號:機器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
什么是非標(biāo)定制超聲波清洗設(shè)備?它有什么獨特之處?

陶瓷標(biāo)定板技術(shù)--宏誠光學(xué)
《聊一聊ZXDoc》之汽車標(biāo)定、臺架標(biāo)定、三高標(biāo)定

請問DLP4500套件進行投影標(biāo)定時棋盤格的長寬比是多少?
TIDA-00254使用SDK進行物體點云重建時在系統(tǒng)標(biāo)定時DLP不打光,怎么解決?
請問做反射式血氧飽和度測量時如何進行標(biāo)定呢?
ads1263的零點滿量程標(biāo)定命令有什么用處?
傳感器靜態(tài)標(biāo)定的主要步驟是什么
使用基于模型的標(biāo)定提高開發(fā)效率
基于CW32的儀表精度測量實現(xiàn)(三):標(biāo)定與校準(zhǔn)
基于DCC和張氏標(biāo)定的相機鏡頭畸變校正

請問PGA308EVM標(biāo)定時是否有禁用編程管腳?
康謀技術(shù) | 自動駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定

溫壓補償,提高氣體流量計標(biāo)定精度的關(guān)鍵!






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論