 CANopen的起源,CANopen從何而來?
CANopen的起源,CANopen從何而來?
1. CANopen的起源,CANopen從何而來?
德國Bosch公司于1983年研發CAN協議,用于汽車傳動系統的網絡通訊。之后稱為國際標準ISO11898,目前CANopen由非營利組織CiA(CAN in Automaion)進行標準的起草及審核工作,基本的 CANopen 設備及通訊子協定定義在 CAN in Automation (CiA) draft standard 301. 中。針對個別設備的子協定以 CiA 301 為基礎再進行擴充,如針對 I/O 模組的 CiA401 及針對運動控制的 CiA402。
2. CANopen硬件的優勢?
CAN協議最大的突出特點是錯誤檢測,限制和處理。當CAN設備檢測到總線錯誤時,會拒絕之前接收到的位序列,然后發送“錯誤幀”,其完全由CAN芯片本身處理,不需要人為編程。
支持多主站,類似Profibus DP,總線上每個設備都是主站,也是從站,免除了人為仲裁的過程,方便用戶開發。
報文短幀結構,CAN報文通常只有8個字節,數據幀非常短,在抗干擾能力上具有先天的優勢。解釋一下,為什么短幀結構抗干擾好?如果通訊報文長,發送一幀耗時也就長,假如遇到干擾,辛辛苦苦好不容發送了一條報文,結果因為干擾對方還沒有收到,只能嚎啕大哭。
成本低廉,CAN外設基本在現在主流芯片上都可以找到,20幾塊錢的MCU都支持CAN外設,有的還支持兩個CAN。這里有CiA的積極推廣作用。
3. CANopen軟件優勢?
CANopen主要有CiA在推廣,是非盈利組織,CANopen協議資料,網上一堆,任何人都可以下載到,我們常用的DS301(Draft Standand),DS402,CAN粉絲幾乎人手一本,猶如葵花寶典,一定要珍藏一本。
CANopen協議開發,開源項目非常多,CanFestival就是其中一個,我做過移植,在步科MT4414TE-CAN觸摸屏,用在8位單片機上,此源碼有點耗費資源,網上有很多基于MCU的精簡源碼。
開發完整的CANopen協議棧,是很艱辛的工作,想要做好非常難。難點就在于你對CANopen協議的理解上,比如EMCY,復位節點,是否需要“NO Initialization”,heartbeat,Node guard是否需要?如何處理?這條不能算是其優點。
4. 為什么如此多公司在推廣CANopen?
CANopen對于運動控制來說是一款優秀的通訊協議,采用了面向對象的一些設計思路,比如對象字典,過程數據對象(PDO),服務數據對象(SDO)等等。
CANopen在歐洲已成為最普通的協議,任何一家自動化公司都有CANopen的通訊接口,也成了低配。低配并不代表不好,只是說明其性價比更高。CANopen定義了完整的同步控制機制,使其成為主流的運動控制協議,除了在CAN總線上運行外,還被搬到了以太網上(CANopen over Ethernet),形成了著名的PowerLink,EtherCat工業以太網協議。
在這里多廢話幾句,所謂的運動控制總線標準,沒有多大意義,因為運動控制技術都掌握在各個廠商手里,每一個稍微大一點的廠商,都有自己的專用運動控制協議,如三菱的SSCNET,安川的MECHATROLINK,倍福的CANOPEN以及EtherCat,施耐德的CANopen,西門子的SiMotion,貝加萊的PowerLink,博世力士樂的SERCOS。
由于CANopen(可以看DS402,伺服控制標準)在運動控制的優勢,尤其是同步控制,不管幾流的廠商,在運動控制系統中,多多少少都加入了自己的東西,導致運動控制系統通常是封閉的,很少走互聯路線,事實上要做到互聯也非常困難。
二三流廠家,開發自己的CANopen協議,根據自己的需求,將其移至到不同的物理層上去運行,形成自己的運動控制系統,其性能優劣就在于其對CANopen協議的理解程度了。
基礎:CANopen世界里的九個晦澀概念
1. DCF
是CAN網絡的配置(Config)的數據存檔文件。其作用不大,在Codesys軟件里就有此選項。
2. EDS
電子數據表格,是描述一臺從站設備的屬性,參數的文件,是對從站設備對象字典的描述。比如一臺伺服驅動器,如果其內部參數(每個參數對應對象字典中的一個位置,由index,sub-index決定)沒有更改,其對應的EDS文件就不會更改。多說一句,不是所有的主控制器都需要使用EDS,比如Beckhoff就不需要,他需要你對CANopen DS301,DS402足夠熟悉,人工對齊配置;步科FD,JD伺服按照DS402標準制定EDS文件,用戶可直接配置,降低開發周期。
3. 復位節點
當設備遇到異常(如從站斷線后重連,使用M258測試步科FD伺服),主控會發送“復位節點”,步科的ED伺服復位節點,驅動器恢復出廠值,而且連CAN通訊參數也恢復成默認值。FD,JD伺服是除了CAN通訊參數外,其他配置參數恢復出廠值。
4. EMCY
緊急報文,從站如伺服,在斷電后會發送一條緊急報文,告訴主控其狀態,一般伺服斷電后,其電容電量能保證其發送該條報文。
5. 心跳,節點保護
配置心跳參數,設置心跳周期,心跳消費時間,這個消費者時間實際上是作為一個超時參數。主站收到一個心跳后,開始計時,如果在超時時間內沒有收到下一個心跳,則認為從站離線,并報告錯誤,按照用戶配置的錯誤處理方法處理。
網絡中的每個節點都可以配置心跳,主站可以監聽從站,從站可以監聽主站,從站還可以監聽從站。這里有一個生產者、消費者的概念,總線上的設備定義自己是心跳的生產者,還是消費者。生產者產生心跳,消費者監聽心跳,然后在捕捉到異常后做出對應的處理。
個人認為心跳作用不大,假設某個設備斷線,重連后復位節點,而此設備剛好是使用了原點功能的伺服呢?斷電上電后,原點位置改變。所以在一些客戶應用中,出現此情況,小伙子,你麻利的,趕快斷電重啟吧。
節點保護,其作用類似心跳,但可以讀取從站設備的CANopen通訊狀態(初始化,預操作,操作中,停止),屬于DS301的范疇。
6. DS301和DS402的區別
DS301就是一個通訊協議棧,DS402是建立在DS301的上層協議,屬于伺服類的控制協議,協議中規定好每個對象字典值得作用,比如0x6040,是控制字。DS402把一個伺服應該具有的功能都定義好了,開發廠家按照協議定義即可。
7. 對象字典
從軟件的角度來說,對象字典本質就是一些數據結構的集合。可以這么理解,把對象字典看做是一本書,CANopen設備的行為準則是要參考這本書的,不管它做什么,只要它的行為要參考對象字典,就必須先查閱字典,再決定要不要做。比如它什么時候發送TPDO,這個行為是需要查詢對象字典中對應于TPDO的傳輸類型以及Event timer。還有就是像PDO映射的原理,比如我要發送的數據,都是去查詢這本書,看下它那里寫的什么內容,然后我在把這部分內容以PDO的形式發送出去。
例如你的程序收到了一筆CAN報文,由于可以訪問對象字典的對象是SDO,首先要判斷它是SDO對象,那么你的程序就需要按照SDO中指定的索引和子索引去查找對象字典(一個排好序的數據結構集),找到相應的對象后按照SDO中的指令去操作這個對象,例如把一個值賦給字典中的變量。
8. SDO
這個很簡單,就是類似串口的一發一回模式,主站發送請求幀,從站回復應答幀。
大家看幾個例子就明白了。
To write the 1 byte data : 0xFD in the object dictionary of node 5, at index 0x1400, subindex 2, sends :
605 2F 00 14 02 FD 00 00 00
If success, the node 5 responds :
585 60 00 14 02 00 00 00 00
To write the 4 bytes data : 0x60120208 in the object dictionary of node 5, at index 0x1603, subindex 1, sends :
605 23 03 16 01 08 02 12 60
If success, the node 5 responds :
585 60 03 16 01 00 00 00 00
9. PDO
分為TX-PDO,RX-PDO。
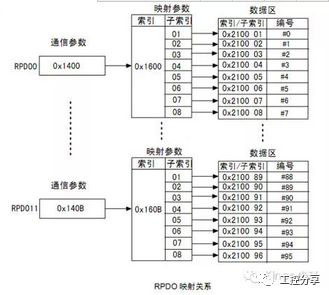
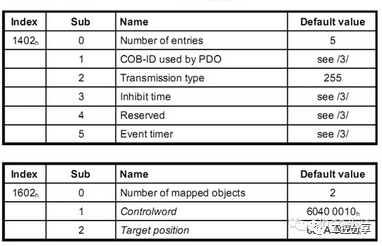
上圖,這就是PDO的配置過程,0x1402(接收PDO通訊參數),PDO使用的cob-id,傳輸類型,Inhibit time,EventTimer。
0x1602(映射對象),上例中映射為Controlword,Target position。
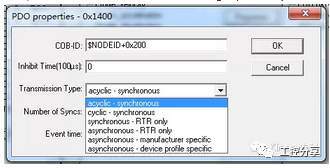
這里著重講一下Transmission Type,上述是codesys中支持的集中方式:
acyclic sync(數值為0):同步PDO,同步方式由具體設備協議定義
Cyclic sync(數值為1-240):同步PDO,每個N個SYNC周期后,發送PDO
Sync rtr(數值253):同步PDO,收到遠程幀請求后發送PDO
Async(數值253):異步PDO,收到遠程幀后發送PDO
最后兩個Async(254,255),都是設備廠家定義的,也是大家最常用的,當事件發生時發送。各個廠家在這里基本都是使用數據變化時發送方式,FD,JD伺服兩種方法是一樣的,都是數據變化發送。要注意設置“禁止時間”,降低CANOPEN通訊帶寬。
具體案例
主控制器寫target position,mode of operation給伺服,此PDO的cob-id為0x200 node id。傳輸方式為255或者254,禁止時間為100,也就是10ms。
審核編輯 :李倩
-
CAN
+關注
關注
57文章
2895瀏覽量
466911 -
伺服控制
+關注
關注
5文章
150瀏覽量
20953 -
運動控制系統
+關注
關注
0文章
93瀏覽量
14355
原文標題:為什么伺服控制中CANopen通訊這么火?
文章出處:【微信號:旺材伺服與運動控制,微信公眾號:旺材伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
協議大和解:ETHERCAT轉CANopen網關配置




使用ES32實現CANopen從機

EtherCAT轉CANopen配置CANopen側的PDO映射

EtherCAT轉CANOPEN:技術突破與未來展望!
CANOpen轉PROFINET網關連接低壓伺服系統
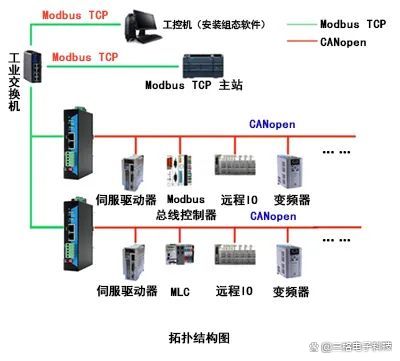
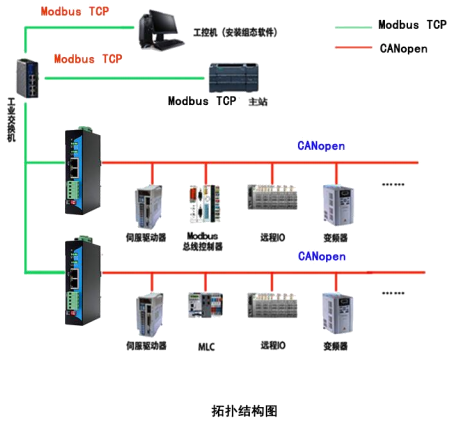
三格電子-MODBUS TCP轉CANOpen網關
Profinet轉CanOpen網關連接與CanOpen協議磁軌道實現高效連接

CANopen協議架構和應用原理
MODBUS TCP 轉 CANOpen
DeviceNet轉CANopen協議網關(DeviceNet轉CANopen)






 工商網監
工商網監
評論