") 想要降低無刷直流驅(qū)動成本和復雜度?
想要降低無刷直流驅(qū)動成本和復雜度?

本文作者瓜弟,長期從事新能源汽車主驅(qū)電機的軟件開發(fā)工作,專注于擴展卡爾曼觀測器、高頻注入等針對電機各項參數(shù)的識別算法的研究,對市面上各個廠商的電驅(qū)方案都有所了解。在本篇文章中,作者對Power Integrations(以下簡稱PI)公司的電機控制軟件開發(fā)套件進行了測評,其中包括了專業(yè)上位機軟件Motor-Expert 2.0和基于libTPCFOC_IPH_Curr_Recon_v01.00.000.a電機控制庫的下位機軟件。該軟件庫搭配PI BridgeSwitch功率器件,能夠?qū)崿F(xiàn)400V電壓平臺下的中小功率無刷電機驅(qū)動,適用于家用或商用的空調(diào)、風扇等,具有很廣闊的應(yīng)用場景。同時由于其功率器件的高度集成化,極大的降低了硬件成本和減少了PCB占用空間。下面是具體評測內(nèi)容。
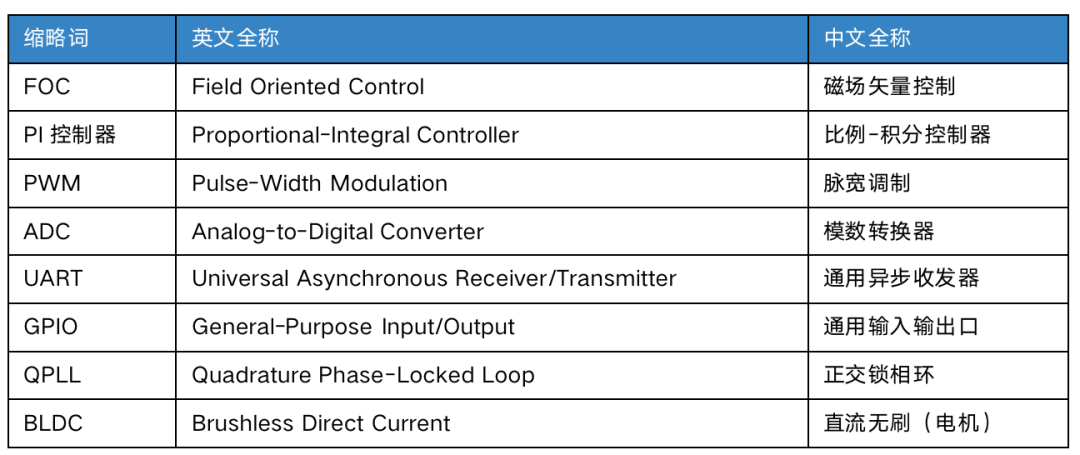
針對文中出現(xiàn)的縮略詞,為避免歧義,在此提前聲明:
開發(fā)套件功能一覽
首先,我們來看看本次測評對象PI電機控制軟件開發(fā)套件的具體組成。主要包括上位機軟件Motor-Expert 2.0和下位機軟件基于libTPCFOC_IPH_Curr_Recon_v01.00.000.a電機控制庫。 Motor-Expert 2.0是PI推出的一款嵌入C語言應(yīng)用程序、庫及控制GUI的軟件,使用BridgeSwitch無刷直流(BLDC)電機驅(qū)動器IC的設(shè)計人員,借助該軟件可對三相電機的運行性能進行精確的控制和調(diào)整。其與電機控制庫的通信協(xié)議是公開的,用戶在產(chǎn)品開發(fā)過程中可使用該上位機進行調(diào)試。根據(jù)說明文檔整理及軟件界面顯示,該上位機具備如下功能:電機狀態(tài)顯示、電機參數(shù)設(shè)置、電機控制指令設(shè)置、數(shù)據(jù)波形顯示(同一時刻最多四個信號)、控制臺等。 對于下位機軟件電機控制庫libTPCFOC_IPH_Curr_Recon_v01.00.000.a,我們根據(jù)說明文檔,能夠整理發(fā)現(xiàn)該軟件庫具備以下功能:
高可配置性,包括在運行過程中也可以進行配置,突出一個“靈活”
速度環(huán)控制、扭矩環(huán)(電流環(huán))控制
通過使用BridgeSwitch功率器件,對三相電流進行重建,實現(xiàn)三相無刷電機無感矢量控制
支持BridgeSwitch功率器件的錯誤總線功能。錯誤總線使用單線通信,可使三組半橋通過同一根信號線連接至單片機,向單片機傳送半橋的四個級別的欠壓、過壓、半橋過熱、驅(qū)動狀態(tài)、過流等故障信息,該功能極大的減少了單片機引腳的使用,確實優(yōu)秀,本人第一次見功率器件及驅(qū)動以總線形式傳遞故障信息
對功率器件的監(jiān)控、保護
數(shù)據(jù)記錄、回放功能,方便系統(tǒng)狀態(tài)診斷和系統(tǒng)參數(shù)調(diào)試
與上位機軟件的通信,方便進行電機控制和數(shù)據(jù)可視化
方便移植至其他單片機平臺。該軟件庫的Demo是基于XMC1400單片機,為Cortex-M0內(nèi)核,48MHz,所以對于大部分基于Cortex-M核的單片機都可使用,只是對于支持浮點計算的單片機,有點性能浪費;使用DAVE開發(fā)環(huán)境,編譯鏈為ARM-GCC,所以移植時需考慮編譯鏈匹配。
綜上所述,該電機控制庫具有完整的電機控制環(huán)路算法,在實際使用過程中,用戶只需要專注處理如下工作:單片機硬件適配、產(chǎn)品應(yīng)用層設(shè)計、產(chǎn)品參數(shù)配置。
明確套件功能后,我們的測評步驟也基本確定:首先使用XMC1400(單片機開發(fā)板)、DER-870(BridgeSwitch器件評估板)構(gòu)建電機控制硬件。然后對PI Demo程序(BridgeSwitch Three-Phase Sensorless FOC Code Library using Integrated Phase Current (IPH))進行硬件適配。再使用上位機軟件Motor-Expert 2.0進行電機控制環(huán)的參數(shù)調(diào)優(yōu)。最后,使用上位機軟件對電機狀態(tài)、相關(guān)數(shù)據(jù)波形進行顯示展示。
硬件環(huán)境搭建
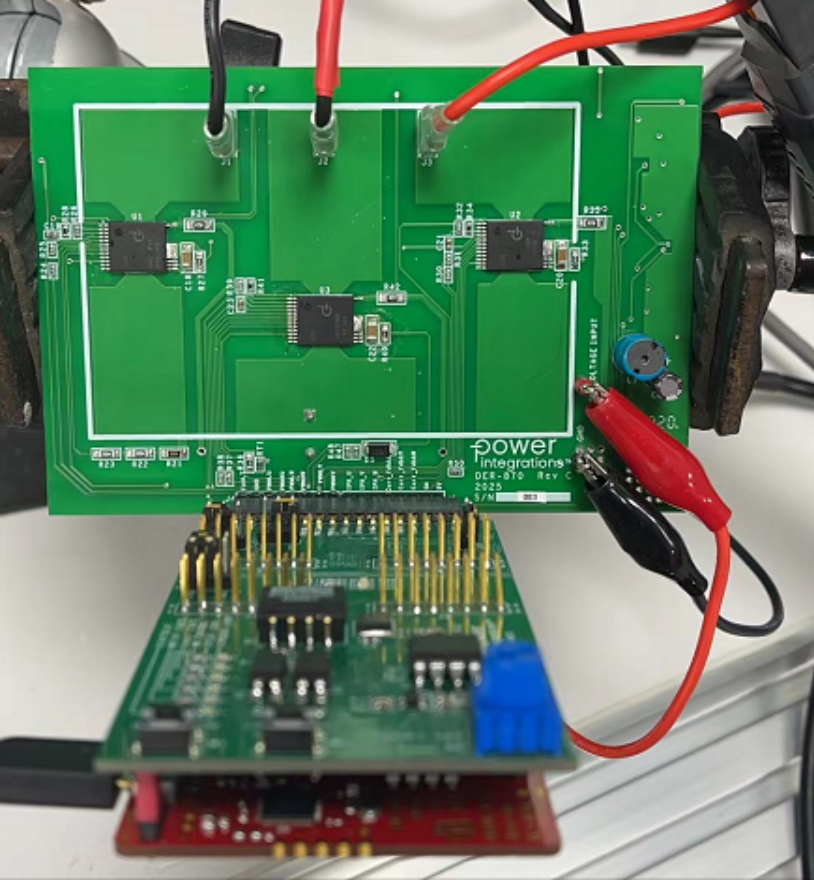
1. 逆變橋 逆變橋使用PI DER-870評估板,實物如下如所示:
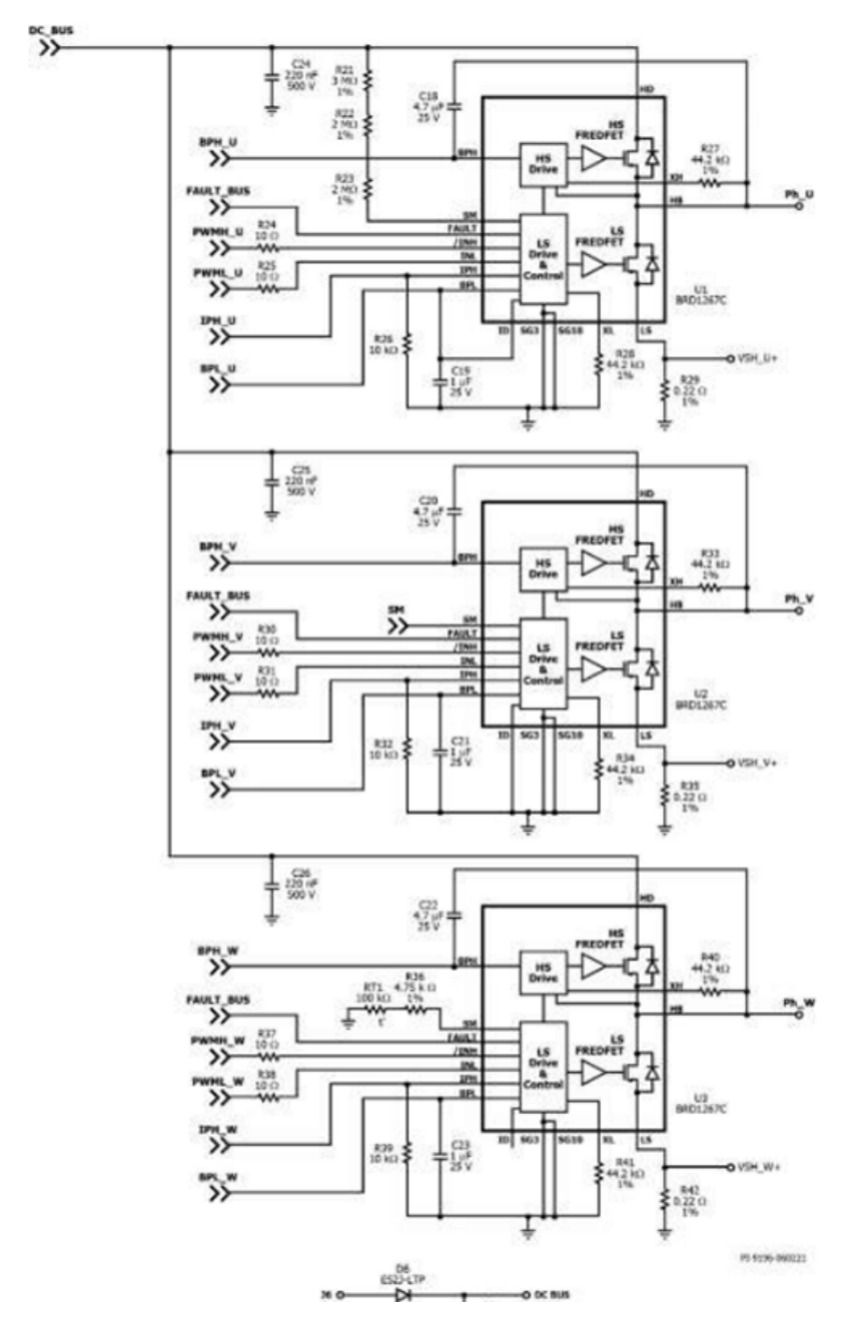
該評估板使用三顆BridgeSwitch BRD1267C 半橋器件,原理圖如下所示:
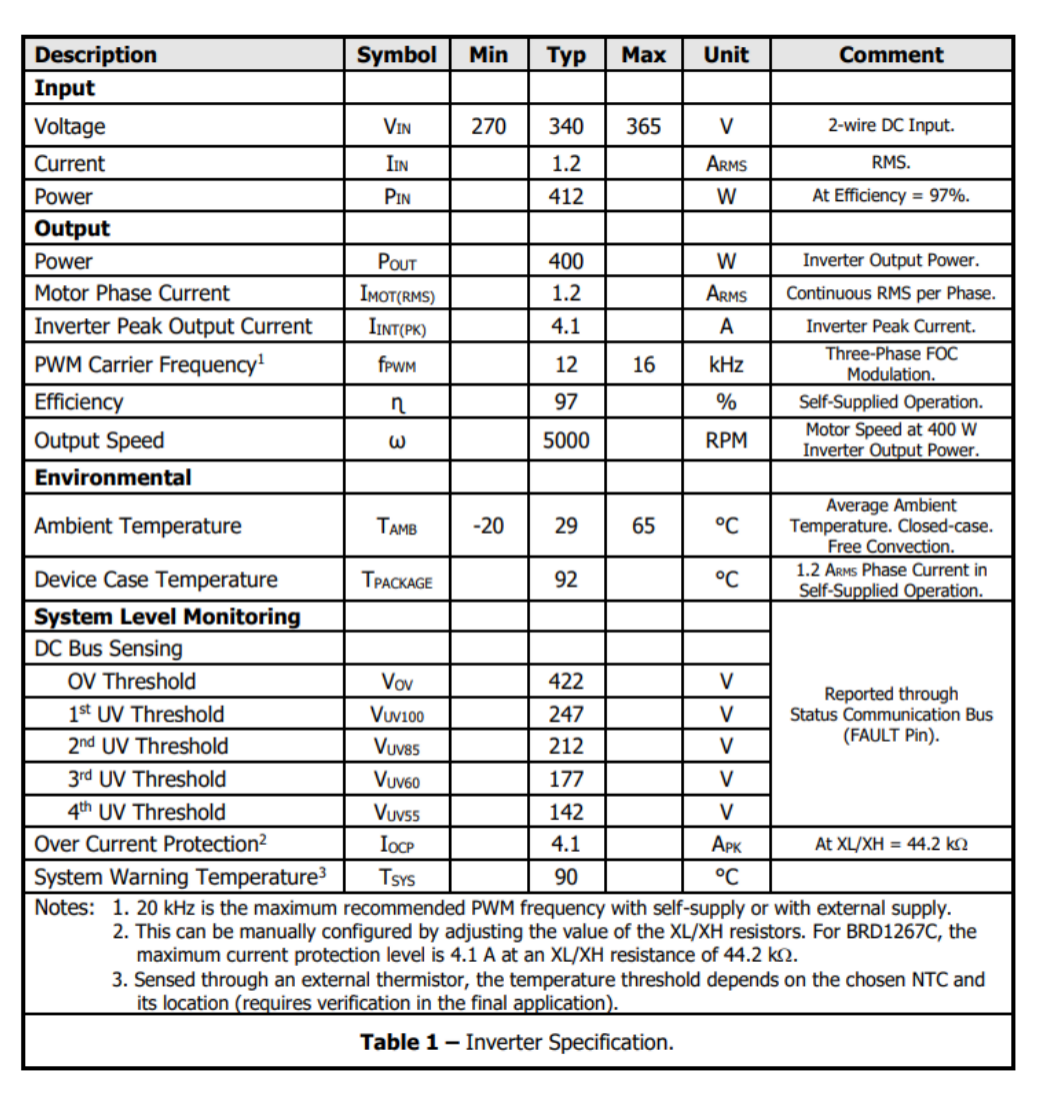
該評估板的主要外參數(shù)如下圖所示:
可以看出,該半橋的電路極其簡單,只需在外圍配置電阻、電容即可正常工作。該評估板背側(cè)另有額外的電流采集電路,試用過程中下未使用,故未列出其原理。結(jié)合原理圖、參數(shù)、Datasheet可知,該評估板的電氣接口定義如下:
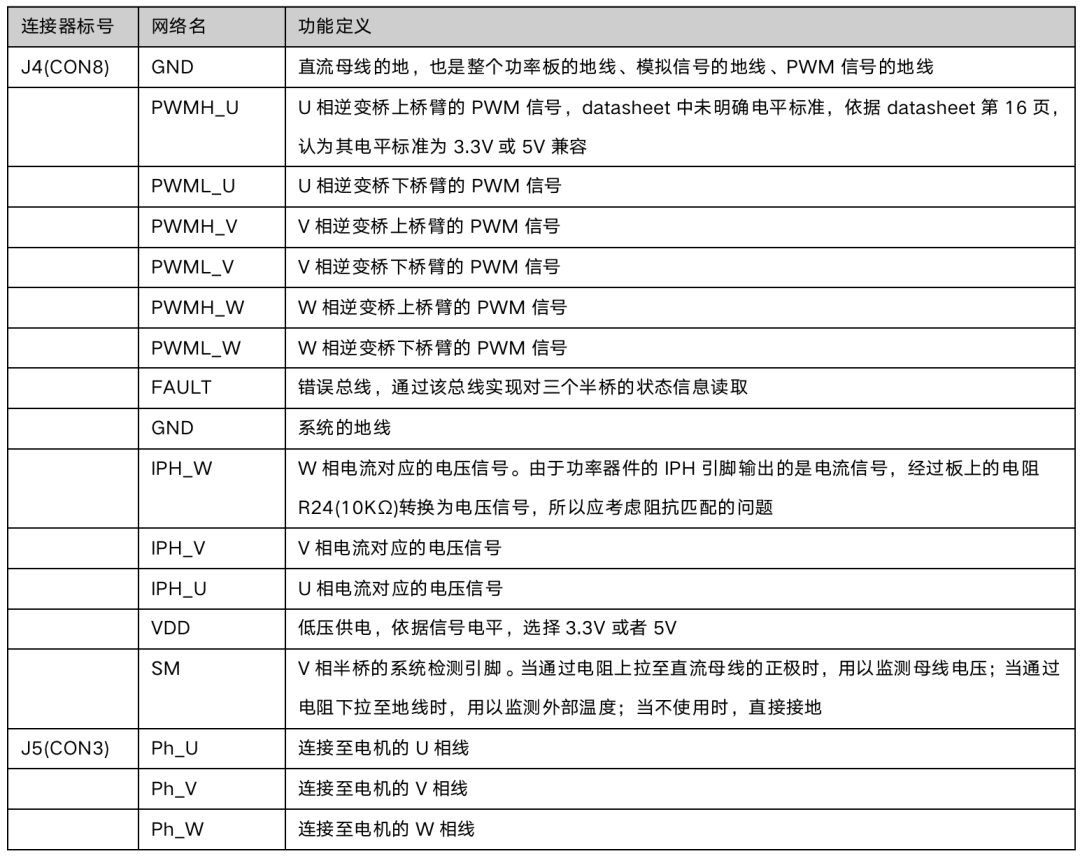
此外,該評估板的關(guān)鍵電信號主要包括:半橋功率器件,相電流與電流信號的對應(yīng)關(guān)系為400uA/A,電流信號轉(zhuǎn)電壓信號所使用的電阻值為10KΩ,對應(yīng)電壓信號為4V/A,該半橋最大輸出電流為0.7A,對應(yīng)最大輸出電壓為2.8V;半橋的上橋臂使用的PWM信號為低邏輯,即當該PWM信號為低時,對應(yīng)上的上橋臂導通;器件ID,逆變橋使用三個半橋功率器件,該三個半橋使用同一根FAULT_BUS信號與微控制器通信,因此需要設(shè)置每個半橋的通信識別ID,通過將半橋功率器件的ID引腳分別:連接至BPL引腳、懸空、連接SG引腳共三種方式來設(shè)置三個ID,微控制器具有默認的ID,因此無需設(shè)置。 2. XMC1400評估板
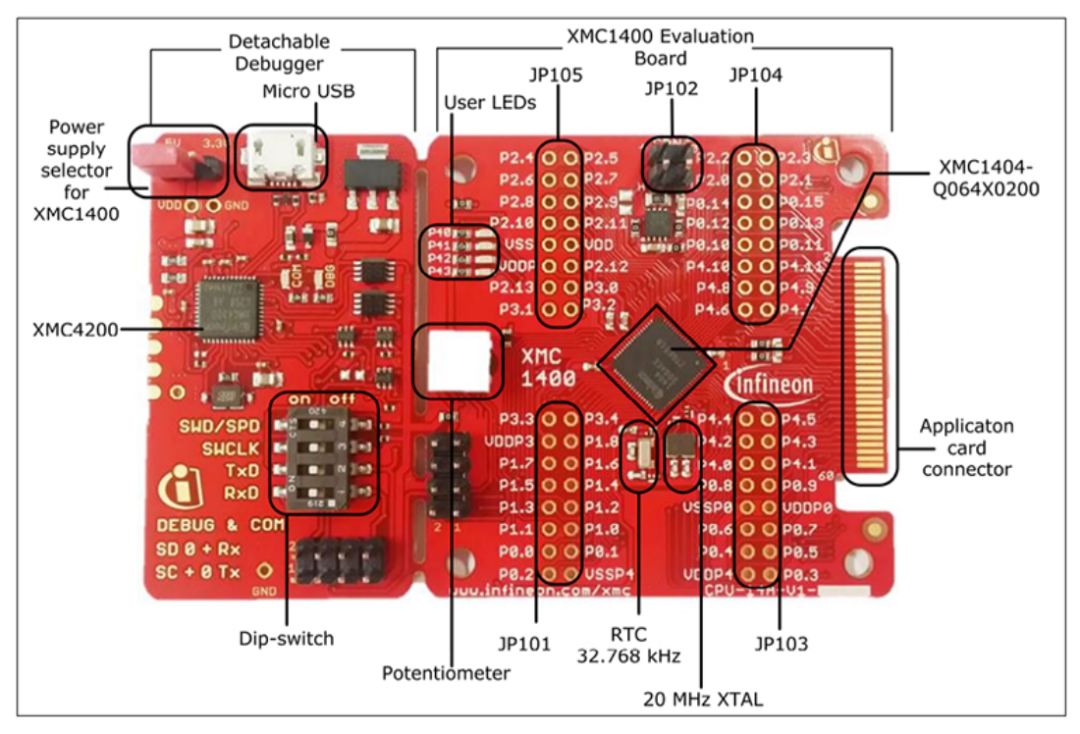
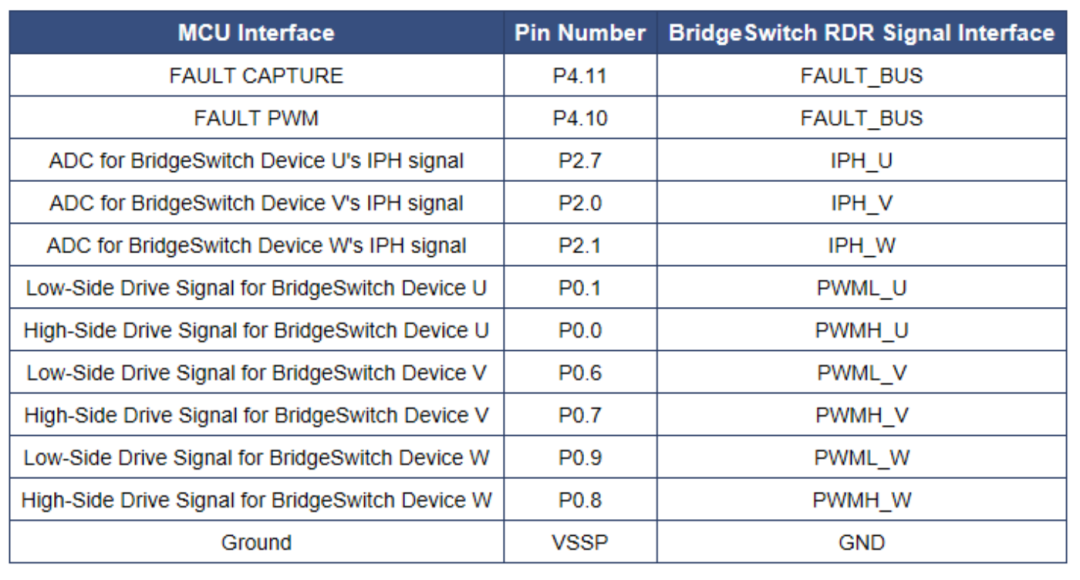
3. 連線 依據(jù)Demo文檔,接線關(guān)系如下:
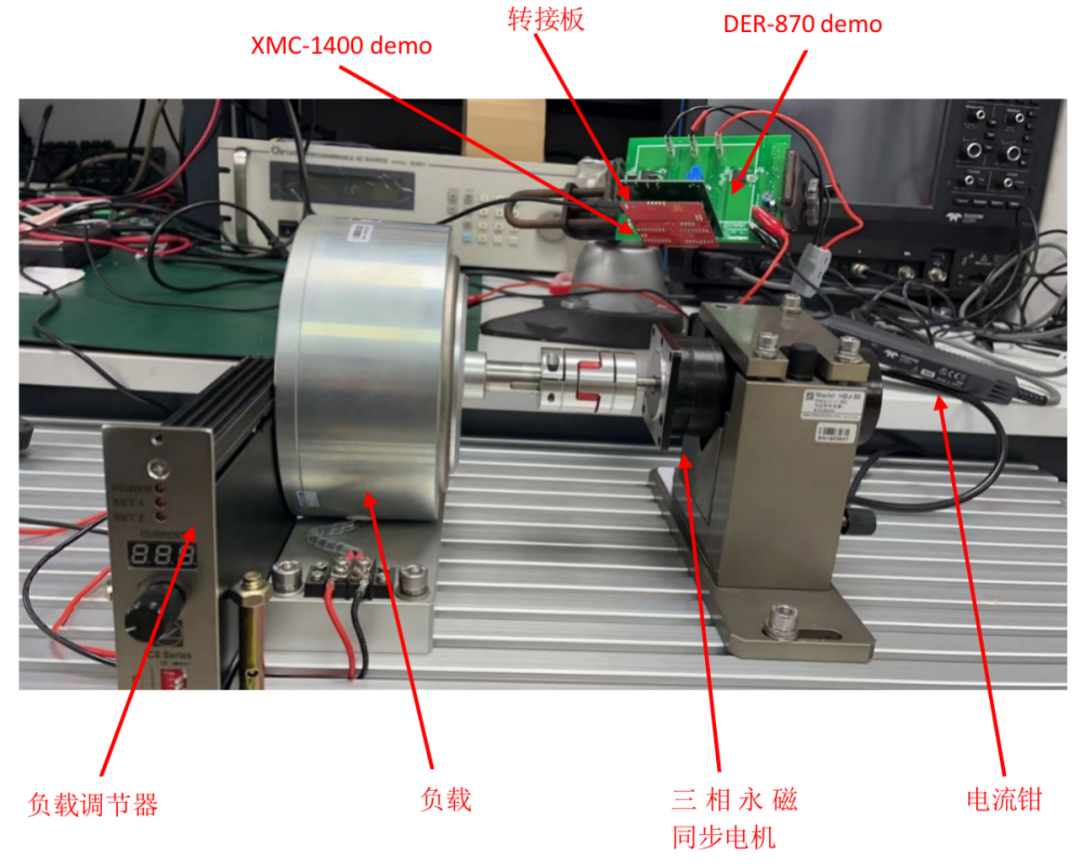
4.電機 電機連接如下圖所示:
電機控制軟件Demo分析
硬件環(huán)境搭建完成,讓我們來看看軟件部分。電機控制軟件Demo程序?qū)⒋a主要分為三層:硬件抽象層、電機控制算法層、電機控制應(yīng)用層。硬件抽象層包括錯誤總線驅(qū)動、PWM驅(qū)動、ADC驅(qū)動、UART驅(qū)動、GPIO驅(qū)動、看門狗驅(qū)動。電機控制算法層包括FOC、反饋信號處理、V/f(壓頻)控制、PI控制器、速度環(huán)、加速度控制、狀態(tài)觀測器、相電流重構(gòu)、電流環(huán)、錯誤總線監(jiān)控、狀態(tài)監(jiān)控。電機控制應(yīng)用層包括故障處理、電機控制、數(shù)據(jù)采集、與上位機軟件的通信。 第一步:電機啟動過程 此電機控制庫所使用的轉(zhuǎn)子位置觀測算法是基于磁鏈觀測算法,當電機轉(zhuǎn)速過低、電流太小(信噪比太小)時,將導致觀測器無法穩(wěn)定閉環(huán),故需要先將電機轉(zhuǎn)速開環(huán)條件下進行轉(zhuǎn)動,其啟動過程如下圖所示:
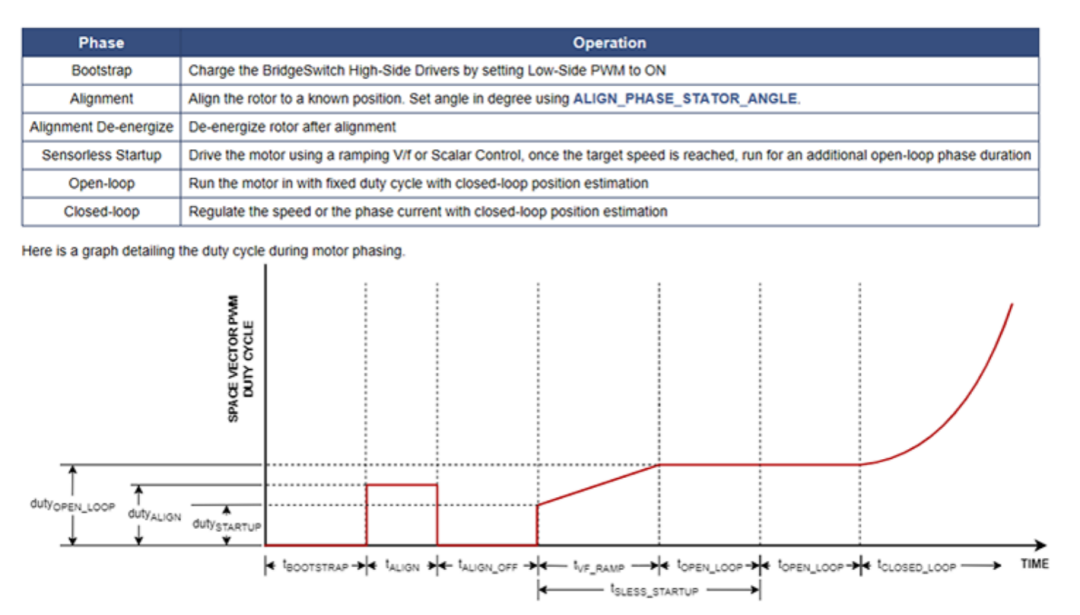
Bootstrap階段
在低成本的逆變電路中,對于逆變橋上橋臂的門級驅(qū)動普遍采用自舉電路,通過二極管、電容來維持上橋臂開通時所需要的的門級電壓。在上圖的Bootstrap階段,當?shù)谝粋€半橋的上橋臂關(guān)斷、下橋臂開通時,通過二極管對自舉電容充電,使得上橋臂在下一個PWM周期內(nèi)可以正常工作。
Alignment階段
此階段,通過給定一個方向恒定的電磁場,強行拉動電機轉(zhuǎn)子轉(zhuǎn)到該角度附近。
Alignment De-energize階段
上一階段后的一段空閑時間,猜測是用于等待轉(zhuǎn)子穩(wěn)定下來。
Sensorless Startup階段
此階段通過開環(huán)拖動,使電機轉(zhuǎn)速逐漸提高至設(shè)定的轉(zhuǎn)速值。
Open-Loop階段
控制器輸出固定的占空比信號,使電機轉(zhuǎn)速逐漸穩(wěn)定下來,預設(shè)置觀測器,用于下一階段的閉環(huán)控制。
Closed-Loop階段
基于上一階段的穩(wěn)定運行,使用磁鏈觀測的方法,進行電機轉(zhuǎn)子角度、轉(zhuǎn)速的閉環(huán)觀測、電流環(huán)、轉(zhuǎn)速環(huán)、應(yīng)用層等的正常運行。
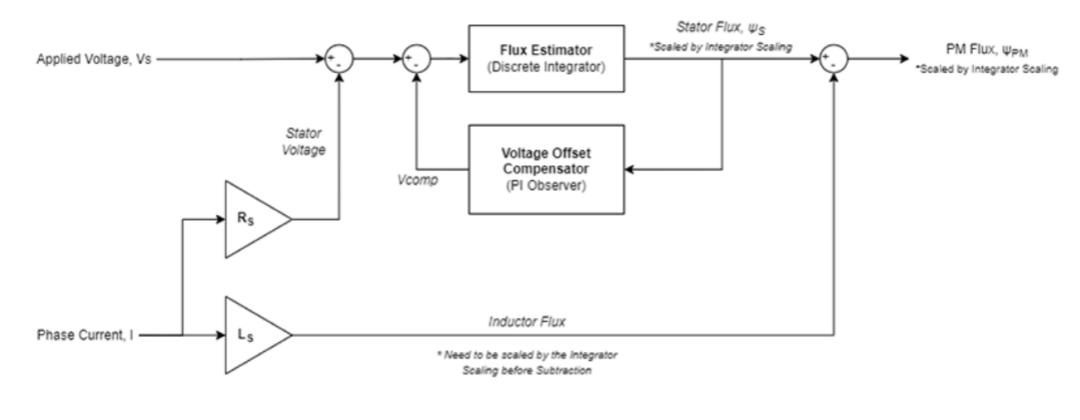
第二步:電機磁鏈觀測器
磁鏈觀測器原理如下圖所示。Vs即控制器的輸出電壓,減去電機電流×電機電阻,理想情況下,為電機的反電動勢+電機電感的電壓,通過該電壓計算得到總的磁鏈,并減去由電流+電感產(chǎn)生的磁鏈,即可得到電機轉(zhuǎn)子的磁鏈。由此可以看出,當電機轉(zhuǎn)速過小,將導致反電動勢過小,信噪比過小,影響觀測效果。同時可以看出,電機電感、電阻、永磁體磁鏈等參數(shù)也將影響觀測器的結(jié)果的準確性。
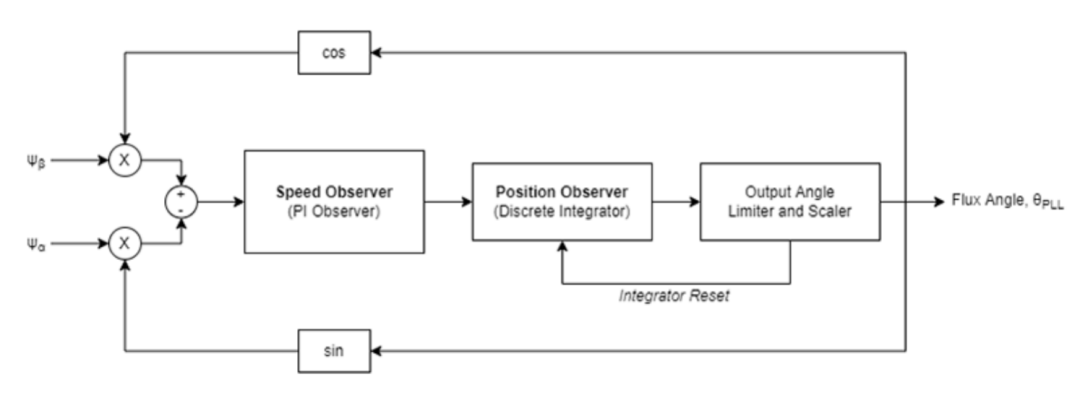
第三步:電機轉(zhuǎn)子位置觀測器 理論上,當?shù)玫睫D(zhuǎn)子的磁鏈矢量時,即可通過arctan()函數(shù)計算出電機轉(zhuǎn)子位置,但是實際中此方法計算得到的電機角度紋波毛刺過大,后需一個低通濾波器。此電機控制庫使用正交鎖相環(huán)QPLL對磁鏈矢量進行處理,即可得到低毛刺的轉(zhuǎn)子位置信號。
第四步:上位機軟件Motor-Expert 2.0 Motor-Expert 2.0軟件是PI公司針對其電機控制軟件設(shè)計的調(diào)試軟件,通過串口與目標控制器進行數(shù)據(jù)交互,完成參數(shù)配置、命令設(shè)置、數(shù)據(jù)回傳等功能。
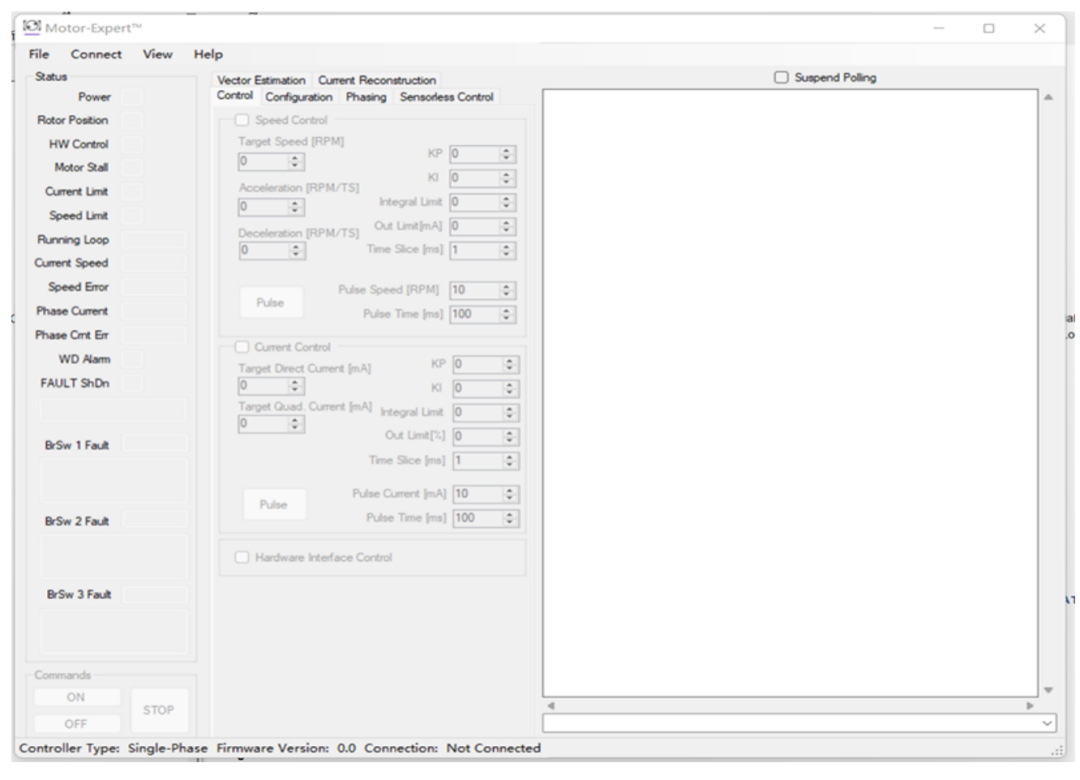
具體使用步驟如下: 1、在下位機內(nèi)燒寫電機控制軟件 2、連接通過USB連接下位機至PC 3、點擊上位機菜單欄‘Connect’,在彈出的對話框中,選擇對應(yīng)的串口號,只有選擇了正確的串口號,才能進行后續(xù)的操作 4、配置參數(shù):
點擊‘Configuration’
‘Motor Configuration’,電機旋轉(zhuǎn)方向,順時針或者逆時針,看需求選擇
‘Current Feedback’,逆變電路參數(shù)選擇,我使用的DER-870開發(fā)板使用的器件為BRD1267,轉(zhuǎn)換電阻為10000 Ohm
‘Motor Stall Monitoring’、‘Current Limit Monitoring’、‘Speed Limit Monitoring’等根據(jù)需要更改
‘Motor Parameters’,根據(jù)實際填寫母線電壓、電機電阻、電感
點擊‘Phasing’,此頁面的參數(shù)對應(yīng)電機的啟動過程參數(shù),當發(fā)現(xiàn)點擊無法啟動,或者啟動時過流,需調(diào)節(jié)此頁參
電流重建、磁鏈觀測器的參數(shù)可暫時使用默認參數(shù)
點擊‘Control’,分別進行電流環(huán)的參數(shù)調(diào)節(jié)、轉(zhuǎn)速換參數(shù)調(diào)節(jié),即可進行電機的恒轉(zhuǎn)速控制。
5、當電機可以較為穩(wěn)定的運行后,點擊‘Vector Estimation’,我遇到的主要是‘Stator Manitude Regular’下的積分項‘KI’參數(shù)過大,導致最終計算結(jié)果角度偏差過大,D軸電流過大,體現(xiàn)出母線電流過大,我將‘KI’參數(shù)減小,‘KP’參數(shù)加大之后,轉(zhuǎn)速不變的情況下,母線電流大幅度減小。
在電機實際啟動過程,先通過給定固定的矢量電流進行相位對齊,此時電機會轉(zhuǎn)動一個小角度,產(chǎn)生抖動,這是此類無感算法的特點。在電機開環(huán)拖動過程中,如果產(chǎn)生明顯抖動,需要調(diào)整開環(huán)拖動期間的PWM占空比參數(shù),有條件的,應(yīng)通過測試設(shè)備實時監(jiān)測電機轉(zhuǎn)速,對比設(shè)定的開環(huán)拖動參數(shù),判斷開環(huán)拖動狀態(tài)下是否發(fā)生電機轉(zhuǎn)子磁場矢量與電磁矢量之間節(jié)拍不一致(PWM參數(shù)太小時,電機轉(zhuǎn)子轉(zhuǎn)速小于電磁矢量的轉(zhuǎn)速)。在開環(huán)狀態(tài)到閉環(huán)狀態(tài),此時容易產(chǎn)生振動,需要減弱速度環(huán)的PI參數(shù),使其轉(zhuǎn)速環(huán)性能變軟。當閉環(huán)控制穩(wěn)定之后,即可進行轉(zhuǎn)速環(huán)指令的調(diào)整。
總結(jié)
本次測評,總體感受是上手很快,節(jié)約了很多時間。由于使用了官方Demo所使用的單片機開發(fā)板,整個Demo順利運行起來還是比較簡單,基本上是下班后讀讀官方的相關(guān)文檔,然后按照Demo文檔所述連接硬件,再連接上位機調(diào)參即可。由于我使用的電機電感比較小,所以在電流環(huán)的調(diào)節(jié)、磁鏈觀測器調(diào)節(jié)上占用了一定的時間。所收獲的經(jīng)驗就是理解軟件的基礎(chǔ)算法結(jié)構(gòu),有利于根據(jù)電機的運行狀況調(diào)節(jié)參數(shù)。
同時,由于PI BridgeSwitch功率器件典型工作電壓為340V,電壓等級為400V,最大擊穿電壓為600V,故在市電下,經(jīng)過一級簡單的整流濾波后,即可作為目標設(shè)備的功率供電,相比較傳統(tǒng)的方案,省去了DCDC電路,節(jié)省了成本。通過直接對市電進行整流后,使用此套方案,即可用在風扇、空調(diào)、油煙機等常見的家用電器之中,在產(chǎn)品尺寸、成本等方面都具有明顯的優(yōu)勢。
同時,也有一些建議,以期待更好的提升。由于基于磁鏈的觀測器,過于依賴反電動勢,對于極低速狀態(tài)下,無法穩(wěn)定運行,建議加入高頻注入觀測器、擴展卡爾曼觀測器等進行低速區(qū)的過渡。此外,建議上位機提供二次開發(fā)接口,作為子進程運行在客戶的應(yīng)用程序下。
審核編輯 :李倩
-
電機控制
+關(guān)注
關(guān)注
3569文章
1957瀏覽量
271655 -
電感
+關(guān)注
關(guān)注
54文章
6197瀏覽量
103917 -
功率器件
+關(guān)注
關(guān)注
42文章
1926瀏覽量
92419
原文標題:媒體報導 | 想要降低無刷直流驅(qū)動成本和復雜度?來看看這篇硬核測評!
文章出處:【微信號:Power_Integrations,微信公眾號:PI電源芯片】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
無刷直流電機RBF磁場定向控制及監(jiān)控系統(tǒng)設(shè)計
【電機】了解無刷直流電機BLDC
無刷直流電機是什么?它有什么特點?
探索 MS37549 直流無刷馬達驅(qū)動方案的奧秘
探索無刷直流電機驅(qū)動方案的技術(shù)應(yīng)用
探索艾比勝 MS39233 無刷直流馬達驅(qū)動方案的奧秘
MS37549:無刷直流馬達驅(qū)動方案背后的技術(shù)原理和應(yīng)用優(yōu)勢
無刷直流電機驅(qū)動器注意事項和選擇指南

無刷直流馬達驅(qū)動IC:便攜式醫(yī)療電子設(shè)備中的關(guān)鍵組件
業(yè)務(wù)復雜度治理方法論--十年系統(tǒng)設(shè)計經(jīng)驗總結(jié)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論