 易派電子科技毫米波雷達,智慧停車位雷達模塊應用
易派電子科技毫米波雷達,智慧停車位雷達模塊應用

隨著經濟的快速發展,城市的車輛越來越多,這就導致了許多城市基礎設施建設已經遠遠跟不上交通的增長速度,尤其是停車設施不足,給居民出行帶來了極大的阻礙。
根據近年來的數據顯示,我國的新建停車位發展較為緩慢,而全國汽車保有量確在逐年升高,這就造成停車缺口越來越大,車多位少成為停車難的根本原因。
在這樣的背景下,智慧停車領域的新技術、新產品的異軍突起,在一定程度上可以填補停車位的不足、利用率不高以及到處亂停導致交通擁堵的幾大短板,對提升城市整體運行效率有著很大的助力,這無疑是一個巨大的市場空間。
傳統的地磁檢測器的工作原理:根據車輛在停車位上會改變周圍磁場,當汽車停留在停車位時,檢測器就通過檢測停車位周圍的磁場變化來判斷車輛是否停留在停車位上,但是在復雜的環境下,這樣的檢測模式極其容易發生重復檢測或者誤檢、漏檢的情況。
易派電子科技毫米波雷達模組,不僅能檢測到停車位上是否有車,還能檢測車輛的運動軌跡。這都大大提高了檢測的精準度,在一定程度上彌補了傳統地磁單模檢測器檢測精度不高、誤檢、漏檢的不足。
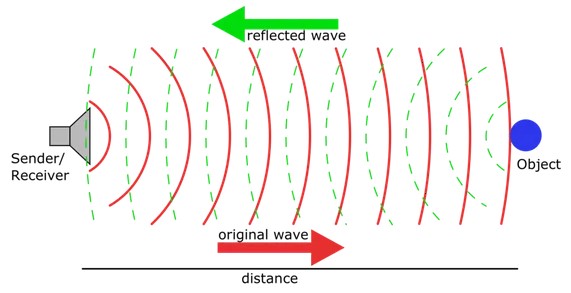
雷達系統通過調制波形和方向性天線來發射電磁能量到空間的特定區域以搜索目標。在搜索區域內的物體(目標)會反射部分能量(雷達發射信號或回波)回到雷達,然后這些回波被雷達接收機處理,以提取目標的信息,例如距離、運動軌跡、速度、以及方向等。
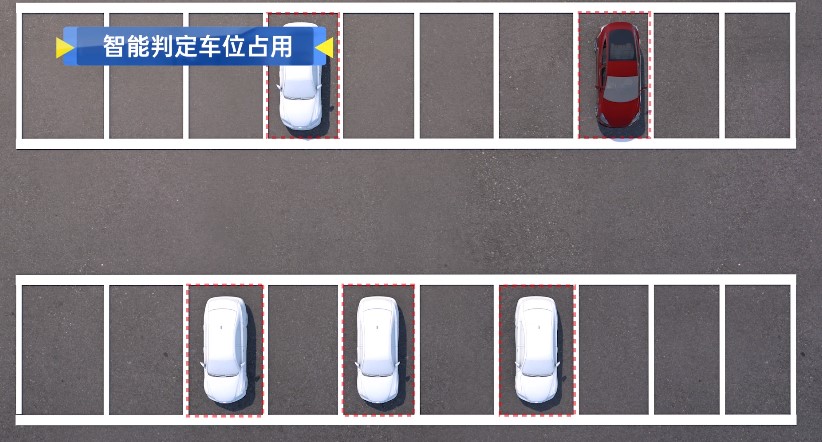
雷達傳感器可與地磁傳感器結合使用,以提高停車位檢測模塊的準確率。雷達傳感器模塊可以準確檢測停車位占用和空閑狀態,并將檢測結果傳輸到相關的智能停車系統和管理平臺。
雷達傳感器具有功耗低、抗干擾能力強、易于集成開發等優點,不受溫度、光線、振動、磁場等環境影響,可全天候全天時工作。
易派電子科技雷達模塊,集成雷達收發,中頻電路及內置雷達天線等,再搭配一些外圍硬件電路即可構成完整雷達傳感器,可嵌入燈具、家電及各種電子產品內,可實現人體、汽車以及各種運動目標的感應探測。
雷達感應模塊穩定性較強,不受外界環境干擾,車位雷達感應,自動檢測車位上是否有車輛駛入車位,泊位占用信息進行實時采集。記錄車輛駛入車位、離開車位時間,以及停車時間。檢測泊位狀態,實時上傳泊位占用情況,相關停車時間也會通過網絡實時傳送到后端平臺。
運用時空信息、匹配和預測等算法,對車輛進行準確的跟蹤,得到車輛對象的運動軌跡,并保存車輛對象的軌跡信息。利用車位引導屏從管理平臺獲取關聯區域相關車位檢測器檢測信息,實時更新區域余位信息,實現空位引導。

在車輛駛入停車場以后,駕駛員可以根據區域引導屏的余位信息和箭頭指示自由選擇一個自己想要前往的停車大區域,待停車結束后,駕駛員可直接開走車輛,車停費自動在手機上扣款,輕松的完成整個停車過程。
審核編輯黃昊宇
-
雷達
+關注
關注
50文章
3117瀏覽量
120056 -
智慧停車
+關注
關注
1文章
165瀏覽量
10899
發布評論請先 登錄
ADAS和防撞系統中的毫米波雷達方案

毫米波雷達信號的傳輸特性
毫米波雷達的基頻和調制技術 毫米波雷達在機器人導航中的應用
毫米波雷達與超聲波雷達的區別
毫米波雷達與激光雷達比較 毫米波雷達在自動駕駛中的作用


毫米波雷達感應Demo






 工商網監
工商網監
評論