 如何在ADAS應用中成功使用NI AWR設計環境平臺
如何在ADAS應用中成功使用NI AWR設計環境平臺
大多數交通事故的發生是由于駕駛人員的錯誤,高級駕駛輔助系統(ADAS)通過提出各種各樣的問題,包括碰撞避讓、胎壓過低,來警醒和輔助駕駛人員,被證明可減小傷亡。
ADAS使用的雷達技術主要聚焦在頻率76-81GHz。這些雷達需要面對各種各樣的應用、工作條件和目標檢測的挑戰,以提供特定駕駛人員輔助功能所需要的可靠覆蓋范圍(距離)和視場(角度)。
本文給出了為下一代智能汽車開發毫米波雷達系統和天線陣列技術背后的挑戰性技術,用實例闡述了如何在ADAS應用中成功使用NI AWR設計環境平臺,特別是Visual System Simulator (VSS)系統設計軟件內的雷達設計功能。
ADAS技術
目前,制造商基于視覺傳感器技術和工作于24GHz與/或77GHz的雷達系統來實現這些系統。視覺系統檢測道路標識,處理其他的可視化道路信息,但是容易受到降水特別是霧與雪導致的性能下降的影響,也容易受距離的影響。
另一方面,遠距離雷達(LRR)支持多種功能,能輕松處理30到200 米的距離,近距離雷達(SRR)能檢測低于30米的距離。支持LRR的77GHz頻段(76-81GHz)預期將為未來的汽車同時提供近距離和遠距離檢測。圖1給出了近/中和遠距離雷達的詳細參數。
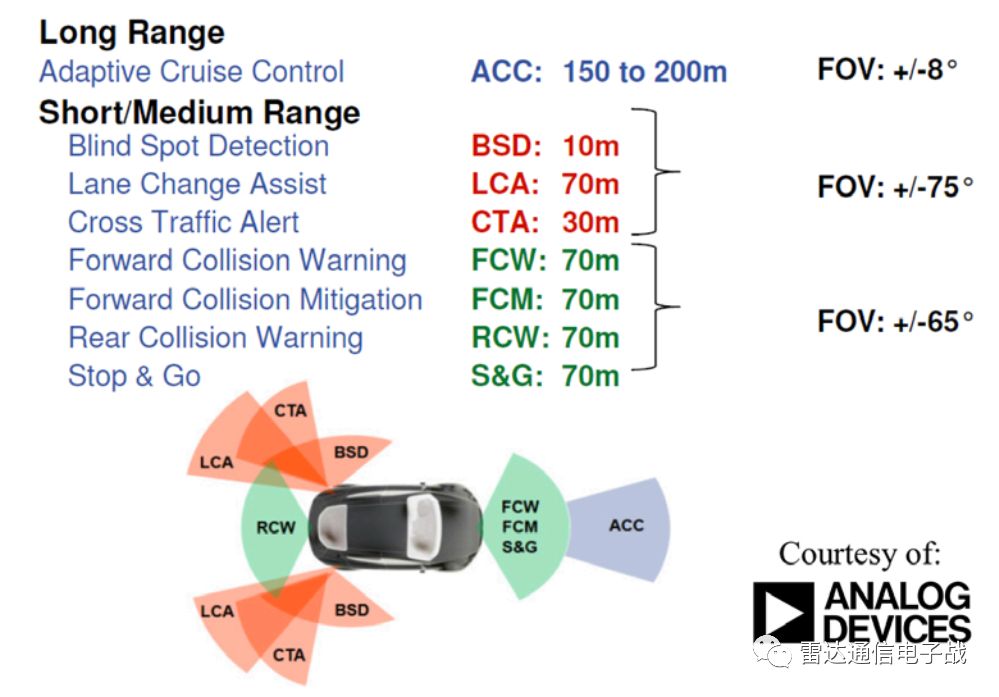
77GHz頻段的技術優點包括:天線較小(只有目前24GHz的三分之一)、允許的發射功率較高,更重要的是可以得到較寬的帶寬,從而獲得較高的目標分辨率。雷達調制技術、天線波束控制、系統結構以及半導體技術的進步,促使人們在未來ADAS汽車中快速選擇毫米波雷達。
為了應用好這些技術,雷達開發者需要與射頻有關的系統設計軟件,以支持具有射頻前端元件詳細分析的雷達仿真,包括非線性射頻鏈路、高級天線設計以及信道建模。在雷達原型機進行昂貴地建造與測試之前,電路與電磁(EM)分析的協同仿真提供了真實系統性能的準確描述。
NI AWR設計環境平臺集成了這些關鍵的雷達技術,為輔助要處理與ADAS電子有關的及其復雜的物理層和電氣設計數據的工程設計團隊提供必要的自動化。ADAS支持包括:
.雷達系統的波形設計、基帶信號處理和參數估計,具有雷達測量的特殊分析,也具有射頻元件和信號處理的綜合行為模型。
.收發信機射頻/微波前端的設計,具有針對印制板(PCB)和單片微波IC(MMIC)/RFIC設計的電路級分析和建模(分布傳輸線、有源和無源器件)。
.平面/3D 電磁分析,用于描述天線和天線陣列、無源結構、復雜互連以及外殼的電氣行為。
.仿真軟件和測試儀表的互聯。
雷達結構和調制類型
對于自適應巡航控制(ACC),為了處理高速公路上的多目標場景,目標測距和速度測量要同時進行,要求既有高分辨率又有準確性。目前的ACC系統使用相對熟悉的波形,具有較長測量時間(5-100ms)。與之相比,未來針對安全應用的開發,如避免碰撞(CA)或自動駕駛(AD),要求具有更高的可靠性(極低的虛警率)和極快的反應時間。
對汽車雷達系統的重要要求包括:ACC的最大探測范圍近似為200m,測距精度大約1m,速度分辨率2.5km/h。為滿足這些系統要求,已實現了各種波形調制技術和結構,包括連續波(CW)發射信號或經典的具有超窄脈寬的脈沖波形。
對于固定的高分辨率測距系統而言,與脈沖波形相比CW雷達系統的主要優點是測量時間相對較低和計算復雜。文獻中常見的兩類CW波形包括線性頻率調制(LFMCW)和移頻鍵控(FSK),移頻鍵控技術至少使用兩種不同的離散頻率。表1比較了不同雷達結構及其優缺點。
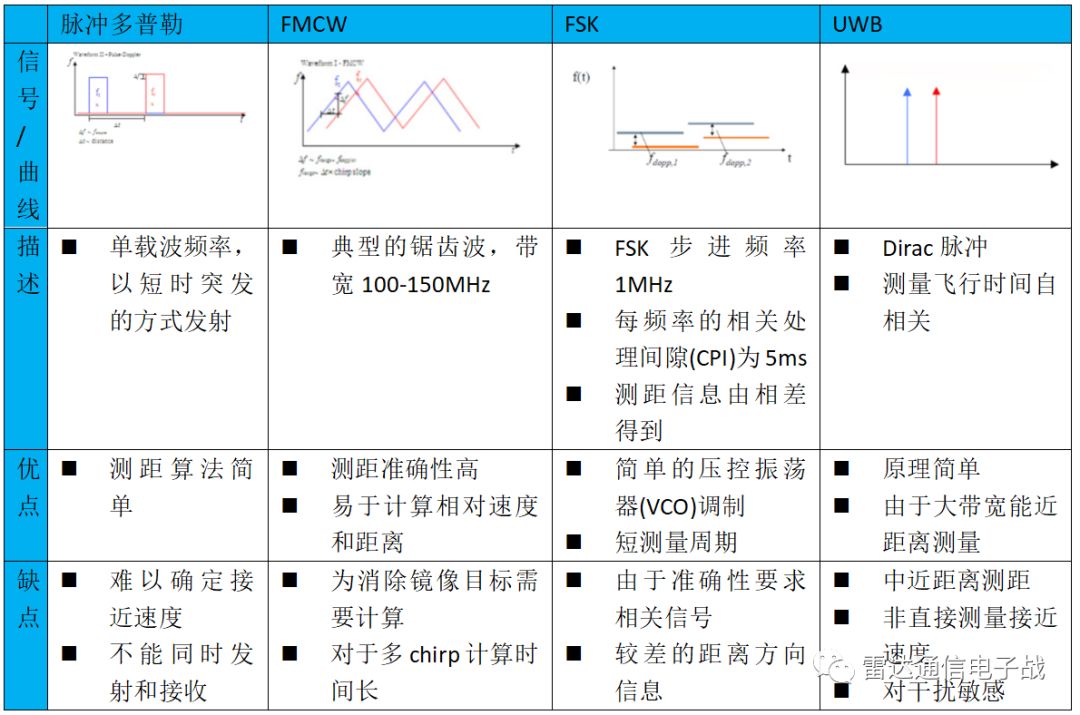
對于ACC應用,同時進行測距和相對速度的測量極其重要。LFMCW和FSK可滿足這些要求。LFMCW需要多個測量周期和數學計算以解決模糊性,而FSK測距精度則差了點。結果,一種將LFMCW和FSK結合在一起稱為多頻移鍵控(MFSK)的單波形信號令人們極其感興趣。
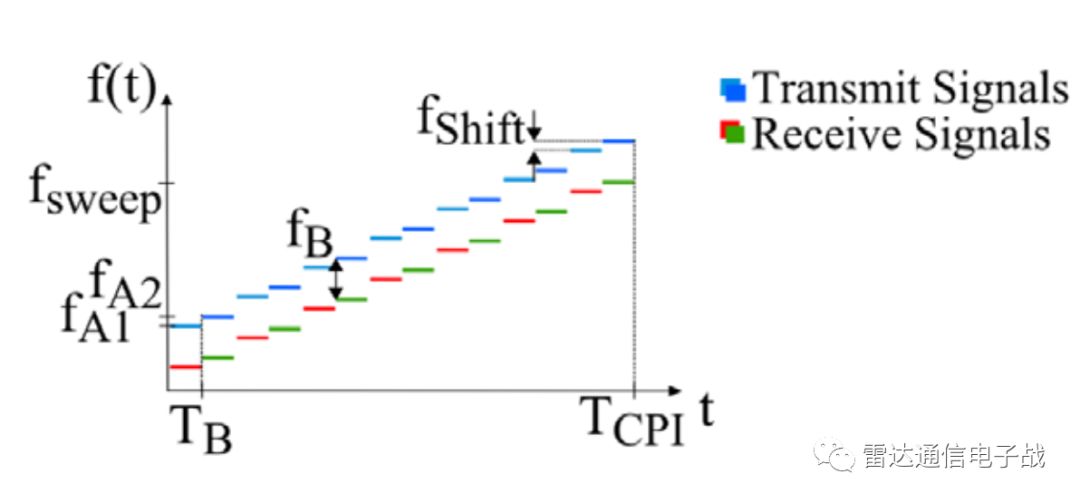
MFSK是專為汽車應用雷達開發的,包含兩個或更多具有交替頻移以及一定帶寬和持續時間的發射頻率,如圖2[1]所示。
如前所述,脈沖雷達也被廣泛應用于汽車雷達系統。相對速度的確定可以用相關發射機和接收機測量包含多普勒頻移的脈沖之間相位變化來獲取。對于多普勒(PD)雷達,測距仍然依靠信號的傳播時間。為了同時進行測距和相對速度的測量,脈沖重復頻率是一個重要的參數。
VSS軟件專用于RF系統設計
VSS軟件是一種射頻、無線通信和雷達設計的解決方案,提供為準確描述當今先進的雷達系統信號產生、發射、天線、T/R開關、雜散、噪聲、干擾、接收、信號處理和信道模型設計挑戰和分析需求所必須的射頻和數字信號處理(DSP)部件的仿真和詳細建模。
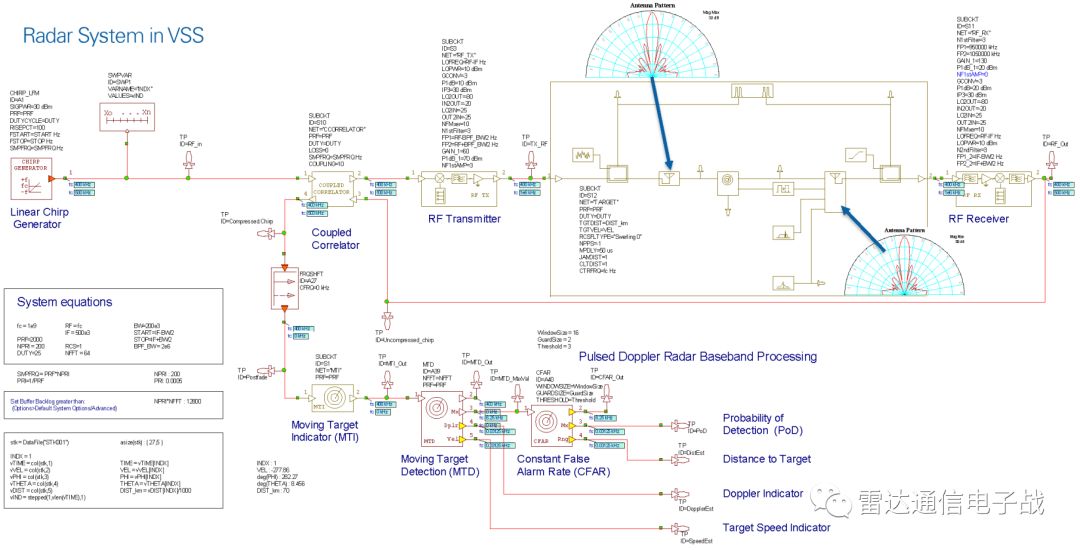
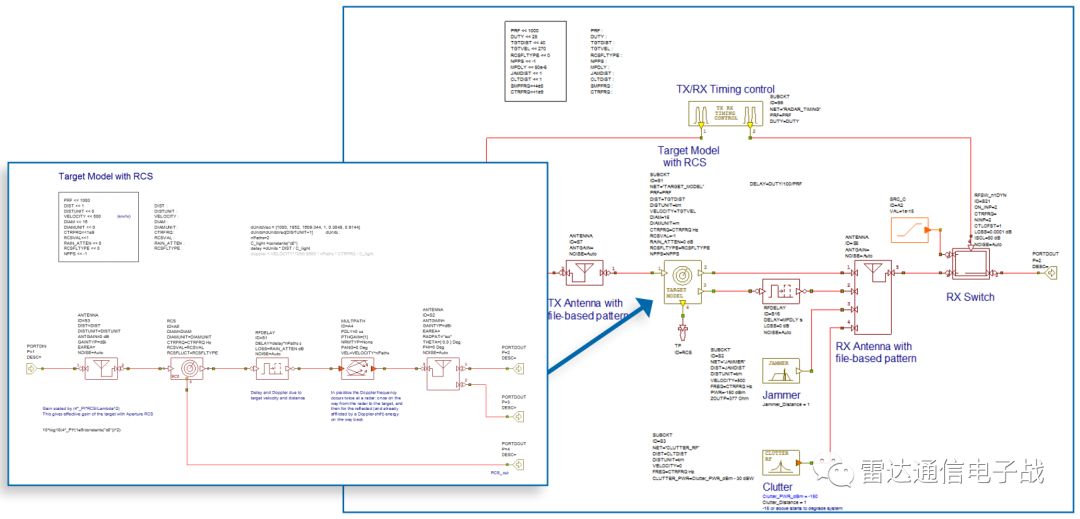
圖3給出了一種可行的ACC雷達結構、調制框圖、信道建模和測量配置的VSS工作空間示例。該工作空間包含多普勒(PD)雷達系統設計,具有用于仿真的信號產生、射頻發射、天線、雜散、射頻接收、動目標檢測(MTD)、恒虛警(CFAR)處理器、信號檢測等。
Chirp信號的電平為0dbm,PRF=2kHz,占空比25%。目標模型根據多普勒頻率偏移和目標距離定義,到達角(THETA/PHI)根據數據文件規定,隨著時間變化,產生多普勒頻率和信道延遲以描述不同速度和距離的目標反射信號。可以包含雷達雜散模型,其功率譜密度形狀也可以改變。在本例中,雜散的幅度分布設為瑞利型,雜散的功率譜設為Weilbull概率分布。
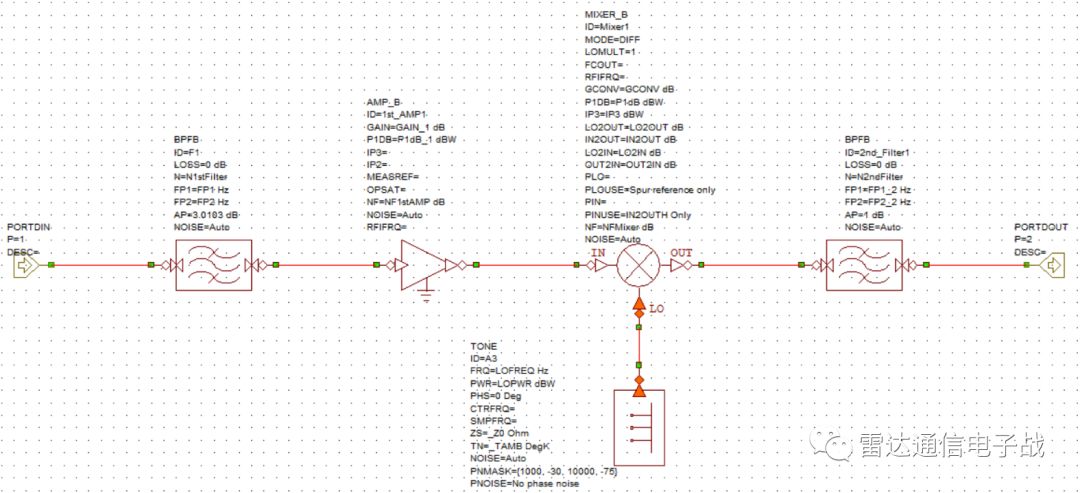
圖4中的射頻發射機包括振蕩器、混頻器以及濾波器,其增益、帶寬和載頻基于系統的要求或射頻團隊提供的實際硬件性能進行設定。同樣,射頻接收機包括振蕩器、混頻器、放大器和濾波器,其增益、帶寬和載頻基于系統的要求進行設定。
為了更有效檢測運動目標,使用了MTD。MTD基于PD雷達的高性能信號處理算法。一組多普勒濾波器或FFT算子覆蓋了所有可能期望的多普勒頻移,而且在CFAR處理中使用了MTD的輸出。在本特例中,提供了檢測率的測量和CFAR。
雷達信號波形必須在時域在接收機輸入端進行測量。因為目標返回信號通常受雜散、干擾或噪聲的影響,在時域進行檢測是不可行的。MTD用來在頻域實現多普勒和距離檢測。在MTD模型中,與目標測距和多普勒頻率相應的數據被集中起來。然后,使用CFAR處理器基于檢測和虛警概率設置判決門限,如圖5所示。
這種相對簡單的設計可用作不同PD應用的模板。雷達信號是脈沖重復頻率(PRF)、功率和脈寬(占空比)的函數。這些參數可以根據不同的情形進行改變。在仿真中,雷達信號可以被任何通過數據文件讀入器定義的信號替換。
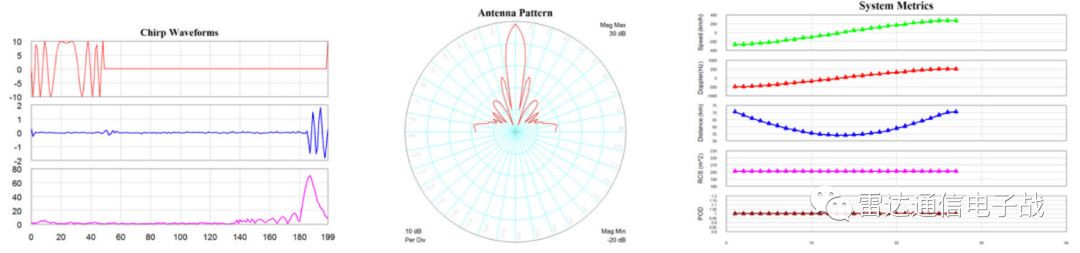
圖6示出了幾種仿真結果曲線,包括發射和接收chirp波形、天線方向圖和幾種系統測量,如相對速度和距離。在仿真中,到目標的距離掃描反映了接近并經過靜止雷達的汽車導致多普勒頻率從負值變為正值(紅色曲線),在目標經過雷達時相對距離為0。在用于ACC的汽車雷達中,速度和距離信息用于警告駕駛員或采取糾正的動作(例如剎車)
多波束
典型ACC啟停系統需要多個近程和遠程雷達傳感器檢測周圍的車輛。較短的測距雷達一般覆蓋到60m,角度覆蓋達±45°,允許檢測可能并入當前車道的相鄰車道。較遠的測距雷達覆蓋到250m,角度±5°到±10°,以檢測同一車道的前方更遠的車輛。
為支持多范圍測距和角度掃描,模塊制造商如Bosch、DENSO和Delphi開發并將多范圍、多探測功能集成進能力增強、成本敏感的傳感器,使用了多通道發射機(TX)/接收機(RX)結構。這些不同的范圍可以采用多波束/多范圍雷達利用諸如FMCW、天線陣列設計的數字波束成形等雷達技術來實現。
天線
基于FMCW雷達驅動多天線陣列的ACC系統多模型雷達如下圖所示。這種具有數字波束成形的多波束、多范圍雷達同時工作在24GHz和77GHz,利用兩個開關陣列天線實現長距離測距和窄角度覆蓋(150m,±10°)、短距離測距和寬角度覆蓋(60m,±30°)。
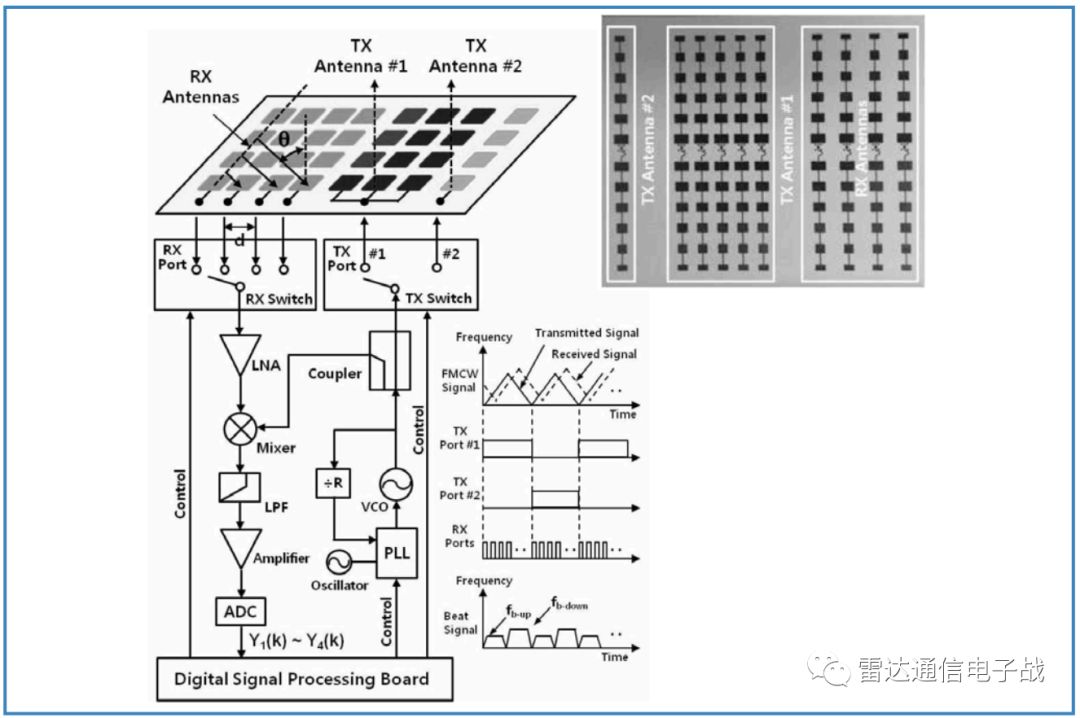
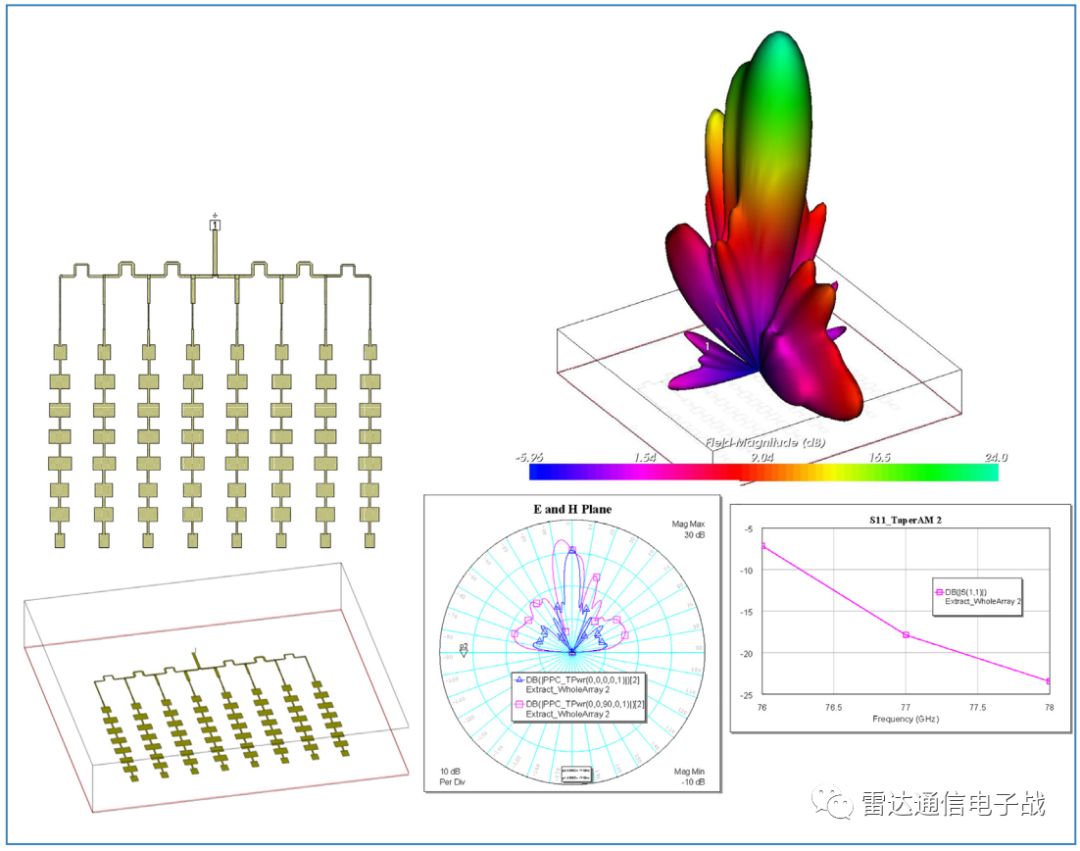
本例說明了多個天線陣列系統的使用,用于這類系統需要的接收機中,這些陣列包括長距離窄角度檢測(77GHz)的多個(5X12單元)串行饋電的貼片陣列(SFPA)和用于短距離、寬角度檢測的單個SFPA(為24GHz設計的1X12單元)和四個(1X12)SFPA。
雷達性能受天線技術的影響極大,必須考慮特定應用的增益、波束寬度、范圍和物理尺寸。在本示例雷達中的多個固定TR/RX天線陣列對于范圍、角度和副瓣抑制進行了優化。貼片天線相對易于設計與制造,在裝配到陣列中的性能也很好,使總增益和指向性增加。
矩形貼片天線設計的性能受天線的長、寬、電介質厚度和介電常數的影響。單個貼片的長度控制了諧振頻率,而寬度控制了輸入阻抗和輻射方向圖。增加寬度會減小阻抗。然而,將阻抗減小到50歐姆通常需要非常寬的貼片天線,這會占用許多寶貴的空間。
較大的寬度也可增加帶寬,基底的高度較大也可增加帶寬。較低的基底介電常數數值控制了邊緣場,導致較寬的邊緣,因此能得到較好的輻射。減小介電常數也會增加天線的帶寬。較低的介電常數值也會增加效率。
設計單個貼片天線或陣列,可以使用設計軟件利用EM分析準確仿真和優化性能。NIAWR設計環境平臺包括AXIEM 3D平面和AnalystTM 3D有限元方法(FEM) EM仿真器。這些仿真器不僅仿真天線的近場、遠場輻射方向圖、輸入阻抗和表面電流等性能,也能直接與VSS軟件協同仿真,自動將天線仿真結果并入到總雷達系統分析中,不需要在EM仿真器和系統設計工具之間手動輸出/輸入數據。
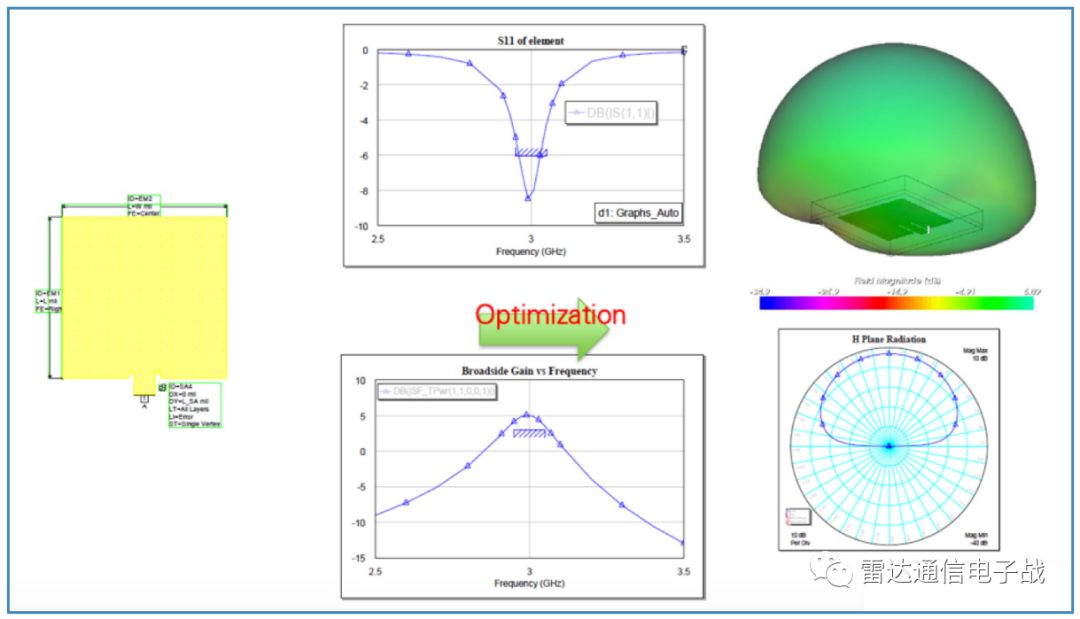
AXIEM和Analyst仿真器都能輸入用戶定義的天線物理屬性如貼片寬度、長度以及電介質的屬性如材質和基底厚度,生成電氣響應。AXIEM仿真器特別適合于貼片天線分析(如上圖),而Analyst仿真器最適合于3D結構如同軸饋線結構或有限介質(當近似為PCB邊緣時會影響天線的性能)的建模。下圖給出了結合有饋線的貼片天線陣列。
為了確定產生所需要電氣響應的物理屬性,天線設計者可使用AntSynTM天線分析和優化模塊。AntSynTM軟件使用戶能規定天線的電氣要求和物理尺寸約束,軟件探索設計配置的集合,基于專用的遺傳優化和EM分析確定最優結構。
生成的天線幾何尺寸可以被導入專用的平面或3D EM仿真器如AXIEM或Analyst仿真器,用于驗證或進一步分析/優化。
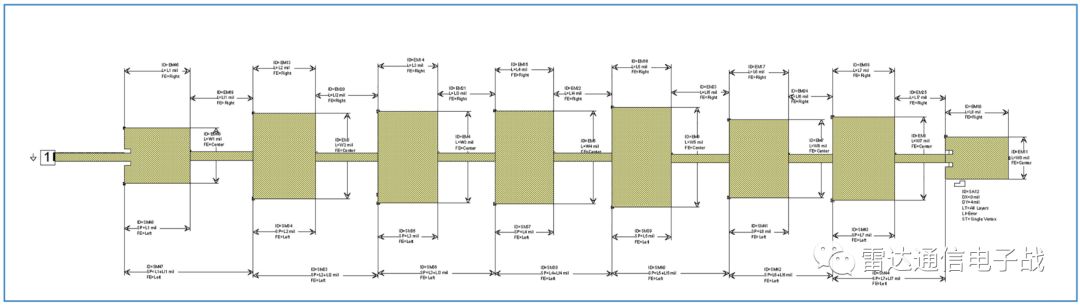
可以將簡單的單元如微帶貼片組合起來很容易地構成平面單元陣列結構。貼片可以串聯配置成上圖所示的1x8貼片陣列,每個單元通過傳輸線“可調”部分串聯連接。在該AXIEM項目中,每個陣列單元的長度和寬度以及連接的傳輸線可以用變量來定義,允許對總體陣列性能優化。
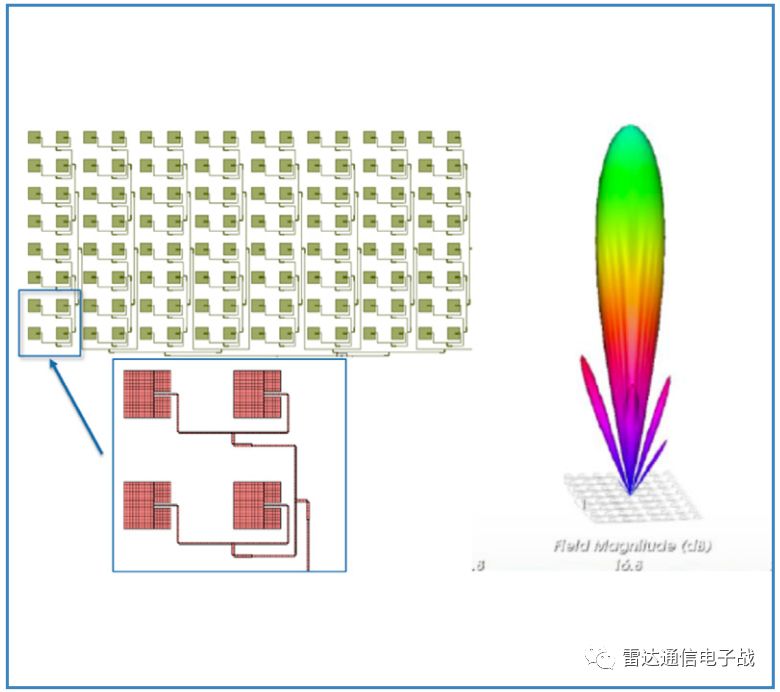
1x8陣列可以進一步擴展為8x8的高增益固定波束陣列,如下圖所示,為[2]所報道的8x8陣列的復制。(7GHz 8x8陣列,具有N*λ/2饋電,λ/2<間距<λ)
在VSS軟件內,陣列可以用專用相控陣模型表述為系統行為模塊,使設計者能規定陣列結構(單元數、單元間距、天線方向圖、受損的單元、增益漸變等等),用于所需要性能如增益和副瓣等陣列需求的高級別理解。對于天線陣列團隊來說,對于大規模陣列(上千個單元)和開發基本需求的系統設計者,這種方法是最佳的。
也可以用AXIEM或Analyst仿真器進行詳細的物理層陣列建模。在AXIEM或Analyst仿真器中,可以指定獨立的饋電端口,如果是饋電網絡,也可以指定單饋電網絡(圖:8x8貼片陣列的仿真,近似為2.3x2.5cm)
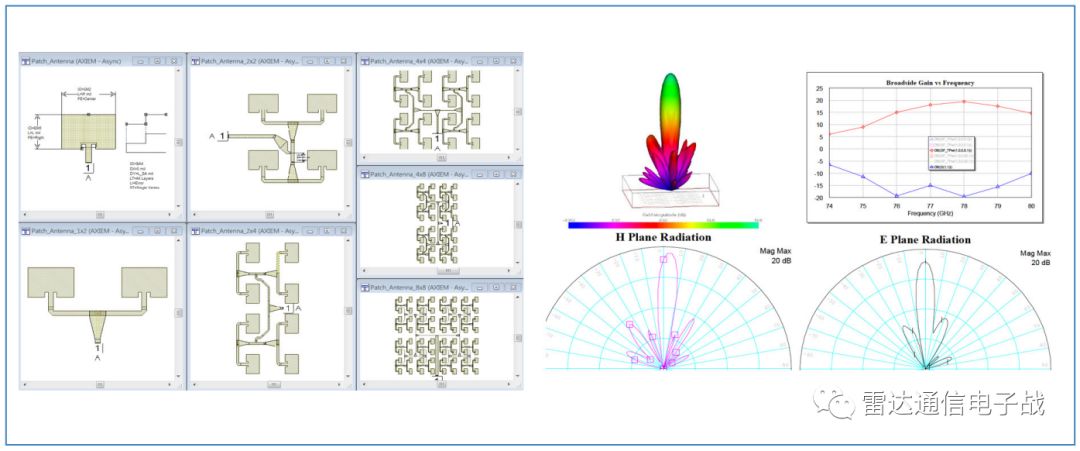
這一方法使設計團隊能研究波束角度和每個獨立單元的輸入阻抗之間的相互關系,允許射頻前端元件設計者考慮對收發信機性能的阻抗負載效應影響。這一能力突顯了具有射頻電路、系統和EM協同仿真的重要性,以在制造這些復雜系統之前準確研究電路/天線行為。
MIMO和波束控制天線技術
對于汽車,雷達會接收到不想要的來自地面以及環境中任何較大靜止物體的后向雜散,如建筑物和護欄的側面。除了直接路徑反射,散射體之間還存在著多徑反射。通過使用多輸入多輸出(MIMO)天線可減輕雜散的影響。
MIMO雷達系統使用多天線系統,每個發射天線獨立于其他發射天線輻射任意波形。每個接收天線都可以接收這些信號。由于不同的波形,回波信號可以重新分配給單個發射機。
N個發射機天線的場和K接收機的場數學上合成為一個虛擬的K*N單元的場,形成一個較大的虛擬孔徑,使設計者可減少必要的的陣列單元數目。因此,MIMO雷達系統提高了空間分辨率,極大提高了對干擾的抑制。通過提高信噪比,目標檢測概率也增加了。
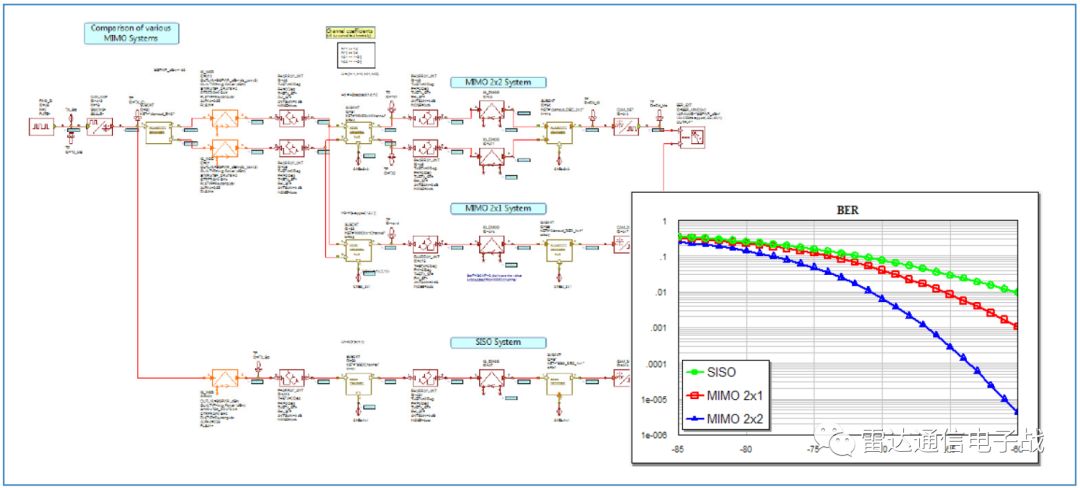
VSS軟件能實現用戶規定的MIMO算法,評估與具體信道模型相關聯的總體性能。這種信道模型可以仿真高度定制的多徑衰落信道,包括信道路徑損耗、收發信機之間的相對速度、最大多普勒擴散。支持獨立的或連續的塊與塊之間的操作,信道可以包含多種路徑(LOS、瑞利、萊斯、頻移),可以根據其衰落的類型、延遲、相對增益和其他應用特征獨立地配置。
該模塊也可以仿真用戶定義幾何尺寸的接收機天線,使其能仿真單輸入多輸出(SIMO)系統,如上圖所示。
總結
本應用示例討論了ADAS設計面臨的挑戰,通過例子闡述了VSS軟件的雷達設計能力如何幫助設計者克服這些障礙。在車輛中ADAS越來越普及,不斷地研究與開發使其更復雜、可靠性更高。類似NI AWR設計環境平臺這種仿真技術的進步,特別是對射頻敏感的電路設計、陣列建模和系統級協同仿真,使天線設計者和系統集成者可優化這些系統,以達到挑戰性的尺寸、成本和可靠性目標。
審核編輯:郭婷
-
NI
+關注
關注
19文章
1124瀏覽量
101820 -
adas
+關注
關注
310文章
2245瀏覽量
209995 -
智能汽車
+關注
關注
30文章
3064瀏覽量
108250
原文標題:基于FMCW的毫米波雷達及天線系統
文章出處:【微信號:雷達通信電子戰,微信公眾號:雷達通信電子戰】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
超聲波清洗機如何在清洗過程中減少廢液和對環境的影響?

基于DYNA4和CANoe的ADAS車輛在環(Vehicle In the Loop)測試方案

AWR1642參考時鐘使用單端晶振,手冊中的DC-Vih指的是輸入高電平判決門限,還是輸入信號的最大值?
AWR2243評估模塊(AWR2243BOOST)毫米波檢測解決方案

康謀分享 | AD/ADAS的性能概覽:在AD/ADAS的開發與驗證中“大海撈針”!

康謀分享 | 直面AD/ADAS快速開發挑戰:IVEX自動駕駛場景管理及分析平臺!

AWR6443、AWR6843 單芯片 60GHz 至 64GHz 毫米波傳感器數據表
如何在不同應用場景下構建音頻測試環境






 工商網監
工商網監
評論