 基于DYNA4和CANoe的ADAS車輛在環(Vehicle In the Loop)測試方案
基于DYNA4和CANoe的ADAS車輛在環(Vehicle In the Loop)測試方案

01.
背景與整體方案架構
隨著汽車電子軟件系統的飛速發展,高級輔助駕駛系統(ADAS系統)越來越獲得消費者的重視。如何在研發的各個階段對ADAS系統進行測試,成為行業內關注的熱點。
在當前的開發流程中,硬件在環(HIL)測試已經廣泛普及,開發人員習慣在域控制器軟件和硬件初步開發完成后先在HIL臺架進行測試,進行軟件和硬件Bug的篩查,然后在實車上對ADAS功能進行最終的性能測試。實車測試的成本非常昂貴,一方面是測試人員的人力成本,一方面是試驗場地和設備的租賃費用。因此頻繁展開實車測試會導致開發成本的快速上升。
在這種背景下,車輛在環(VIL)的概念應運而生。如果在仿真軟件中虛擬化測試場景,而車輛依舊由駕駛員操控,實際行駛在開闊的安全場地中,則可以節省租賃和布置試驗場地的成本,并最大程度上保留對性能測試的精準度。同時,虛擬場景可以最大程度地還原法規標準和企業標準,可以用于最終性能測試前的摸底測試。
針對車輛在環的測試需要,Vector提供基于DYNA4、CANoe軟件和VN系列總線接口卡硬件的整體解決方案。
DYNA4是一款成熟的車輛動力學及場景仿真軟件,提供以下功能:
>
高精度的參數化車輛動力學模型;
>
基于OpenDRIVE和OpenSCENARIO標準的場景仿真;
>
多種理想傳感器和物理傳感器模型;
>
>
基于DYNYanimation的高精度3D模型渲染。
關于DYNA4軟件的特性可以參考往期文章:DYNA4新版本R9正式發布
基于這些特性,Vector的VIL測試方案如下圖所示:
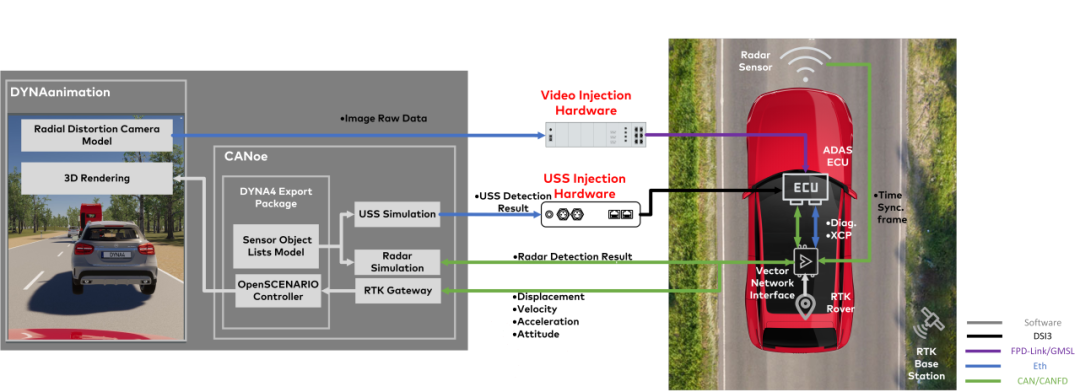
圖1:VIL系統圖解
1.
主車:需要將ADAS域控制器暴露在外,由總線接口卡接入診斷與標定接口,以及部分通過總線進行注入的傳感器接口;
2.
RTK車載單元:安裝在車輛的固定位置,測試人員需要記錄下RTK設備與車輛前保險杠之間的距離以用于場景標定;
3.
RTK基站:布置在試驗場地。RTK基站設置后,測試人員需要使用基站標定坐標系的功能對RTK坐標系進行初始化;
4.
CANoe軟件:運行在工控機中,負責診斷、標定和總線仿真,并能夠調用DYNA4+DYNA animation;
5.
總線接口卡:硬件通訊接口,能夠仿真和測量CAN、CAN FD、FlexRay、Ethernet等總線協議;
6.
工控機:接入NVIDIA高性能顯卡。在工控機中,DYNA4通過編譯成DYNA4-Export Package的方式,在CANoe中運行,并且能夠調用DYNAanimation,實時發送渲染指令。工控機和其余設備通過支架固定在車內,由車載供電系統進行供電;
7.
視頻注入硬件:將視頻注入給ECU,支持FPD-Link和GMSL協議。仿真場景渲染出的視頻Raw Data通過注入硬件轉換為ECU需要的格式,并通過視頻同軸線纜傳輸給ECU;
8.
DSI3注入硬件:支持將Object List轉化為DSI3信號,用于物理模擬超聲波雷達的探測結果;
9.
DYNA4軟件:進行場景渲染和理想傳感器Object List生成。
02.
VIL測試場景構成
在ADAS測試過程中,一個測試場景通常由以下部分構成:
1.
主車
在傳統HIL測試中,主車行為由仿真的駕駛員模型控制,在功能激活時由真實ECU發出指令接管,所有指令由車輛動力學模型進行計算,結果將會被實時渲染在場景中。而在VIL環境中,車輛在場景開始時由真實駕駛員控制,然后在功能激活時由真實ECU接管控制,控制指令的反饋不經過車輛模型,而是直接體現在真實世界中,通過RTK設備進行位置和姿態的記錄。如何將真實世界中的車輛位置姿態反饋在渲染出的虛擬場景中是車輛在環測試系統面臨的第一個關卡。
DYNA4軟件同時擁有動力學模型模塊以及場景仿真模塊,同時客戶也可根據需求只使用動力學模塊或是場景仿真模塊。當只使用DYNA4的場景仿真模塊時,車輛動力學模型由外部提供。外部車輛動力學模型的方案完美符合VIL測試系統的需求。在VIL測試過程中,DYNA4的自由車輛動力學模塊將被屏蔽,來自RTK設備所測量的相對位移和相對速度、加速度以及車輛姿態的結果會被直接接入場景模塊,由DYNAanimation進行3D渲染。通過將RTK坐標系中的位置進行坐標換算為DYNA4世界系統中的坐標,就可以將車輛真實位置反饋在虛擬場景中。
RKT設備所獲得的相對位置(X、Y、Z方向)、速度(X、Y、Z方向)、加速度(X、Y、Z方向)和姿態(橫擺角Yaw,俯仰角Pitch,側傾角Roll)也會通過CAN總線或是RTK供應商要求的通訊協議,傳遞給CANoe軟件,然后在CAPL腳本中經過坐標轉換,最終傳輸給OpenSCENARIO控制器。OpenSCENARIO控制器根據這些數據計算場景中Ego車輛和交通參與者車輛(GVT)/行人(VRU)的軌跡并由DYNAanimation進行3D渲染。
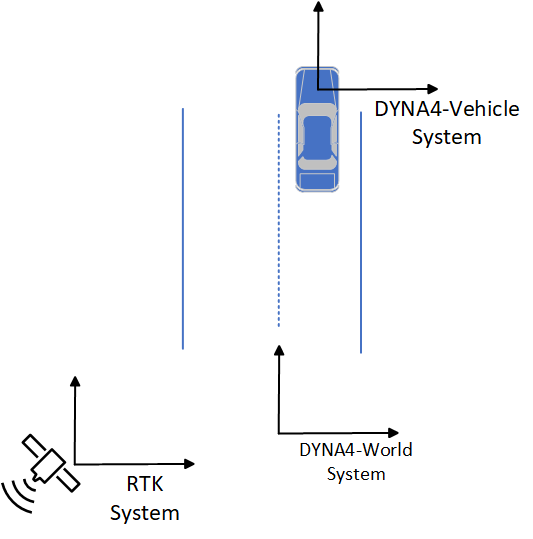
圖2:坐標系之間關聯
2.
交通參與者
在測試中,交通參與者,比如人、車、自行車、電動自行車、摩托車,也需要渲染在3D場景中,并能夠被攝像頭模型或者雷達模型等傳感器捕捉到,從而將結果輸出至ECU中。DYNA4提供兩種交通參與者的仿真方法:一種是在OpenSCENAIO中建立預定義軌跡,一種是在仿真過程中實時給定參與者的位置和姿態。
1)、在OpenSCENARIO場景描述文件中預定義軌跡
在一個特定的場景中,交通參與者的行為通常是被定義好的,每一個行人、車輛都被定義好了相對Ego自車的行動軌跡,在OpenSCENARIO中將這些行為的集合稱之為Story。
在Storyboard中,可以定義行人與車輛相撞,也就是同一時間到達同一個地理位置的行為。
在HIL測試中,Ego車輛的軌跡來自于車輛動力學模型的輸出,而在VIL環境中,來自外部設備記錄的車輛位置姿態也同樣會在場景中生效。也就是說,基于給定的車輛位置和速度,DYNA4 中的OpenSCENARIO控制器將會計算出交通參與者將在何時啟動,以和Ego車輛完成碰撞預期。
在OpenSCENARIO中,所有參與者的位置都是以路網(高精地圖)作為基準的。
在這種情況下,DYNA4支持OpenDRIVE地圖的導入,在OpenSCENARIO中可以將交通參與者通過指定路網中的道路的Id、車道的Id、縱向偏移ds和橫向偏移dt便可精準將交通參與者或者Ego車輛放置在指定位置。
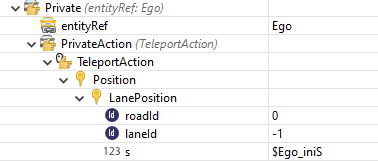
圖3:Ego車輛位置初始化
進一步,行人或者車輛的軌跡被定義為Route(按照OpenDRIVE中定義的車道行駛),或者Trajectory(不按照車道而是按照路徑點進行行駛)。
更進一步,通過仿真時間,或是對Ego車輛位置、速度的約束可以設置StartTrigger激活交通參與者的Story,讓其按照預定義的路徑行動(比如設定仿真開始后10秒,行人開始橫穿馬路)。
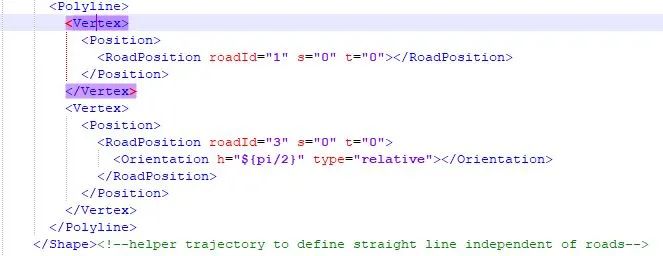
圖4:交通參與者路徑
2)、通過Traffic接口實時渲染
在DYAN4場景中,對交通參與者的行為定義除了由OpenSCENARI控制器進行控制之外,還支持添加用戶自定義路徑的額外交通參與者。這種方案可以用于回放試驗場記錄的場景,可以用于和第三方的交通流仿真軟件(如SUMO)進行聯合仿真。
如圖5所示的DYNA4 Traffic模塊所示,模型中的SXRefValueFlag和SXRefValue是記錄每個交通參與者在DYNA4坐標系X方向的控制標志位和控制數值,比如用戶已經在OpenSCENARIO描述文件中定義了2名行人,那么數組的第3位就可以用來控制額外的交通參與者。
假設給定Flag為101和SXRefValue為100,則可以將交通參與者設置到DYNA4世界坐標X=100的位置處。
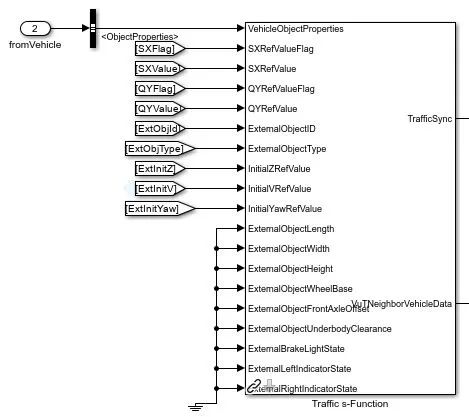
圖5:DYNA4交通參與者控制模塊
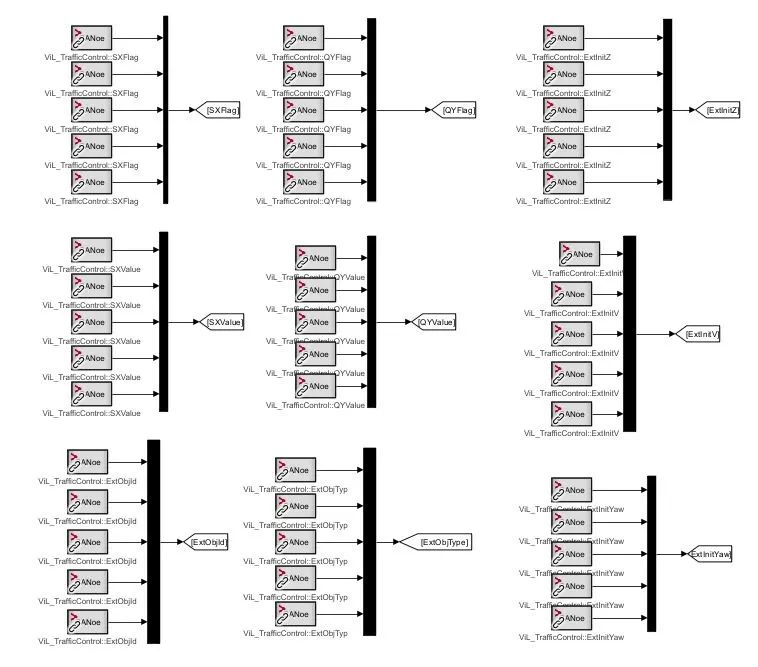
圖6:與CANoe交互示例
3)、傳感器輸出
如圖1所示,在實際測試中,測試車輛中的真實ADAS控制器和毫米波雷達(Radar)傳感器的部分總線會被連接至Vector總線接口卡,這些總線中的控制器狀態信息和傳感器同步信息會被CANoe軟件讀取并用于后續仿真。
同時,經過DYNA4交通傳感器篩選后的目標物列表也會發送給ADAS控制器。毫米波雷達的目標物可以通過總線直接傳輸,超聲波雷達(USS)則可以通過Vector的USS注入硬件按照DSI3協議格式發送給ECU。
對于攝像頭的仿真,場景經過3D渲染后產生的畫面會通過DYNAanimation中配置的攝像頭模型進行處理后,由視頻注入硬件將ECU所需格式的視頻流(GMSL或FPD-Link)傳輸給ECU。ADAS控制器會根據收到的傳感器數據判斷碰撞風險,作出剎車動作,制動效果同樣會通過RTK設備的記錄從而傳輸給DYNA4進行渲染,測試人員可以在DYNA4界面中看到完整的緊急制動功能激活過程。
此外,DYNA4提供多種傳感器模型以適配多種用戶方案,同時支持用戶自定義數據格式的定制化開發。針對攝像頭傳感器,Vector可以針對客戶提供的畸變參數或者自定義畸變模型來定制化開發仿真插件,并在DYNA4配置界面直接使用。針對USS傳感器,Vector也提供傳感器模型以及DSI3協議仿真硬件接口。
03.
測試流程與結果
1)、場景初始化
與HIL硬件在環測試不同的地方在于,雖然OpenSCENARIO中定義的交通參與者位置會直接在場景中預定義,但Ego車輛的位置和姿態則完全由外部輸入控制,也就是說為了保證碰撞場景的實現,Ego車輛在場景中需要初始化在特定的位置上。
DYNA4 OpenSCENARIO場景模塊支持Python腳本模塊的導入,可將OpenSCENARIO中定義的Variable和CANoe中的System Variable橋接起來,從而讀取OpenSCENARIO的設定值并導入到DYNA4模型中進行渲染。
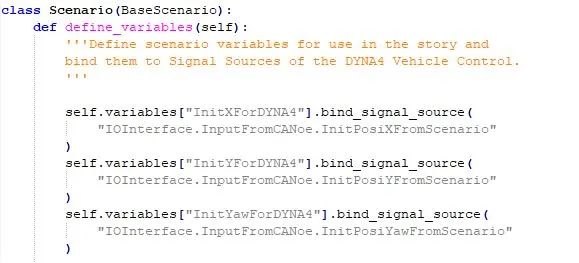
圖7:Scenario Engine中的Python腳本
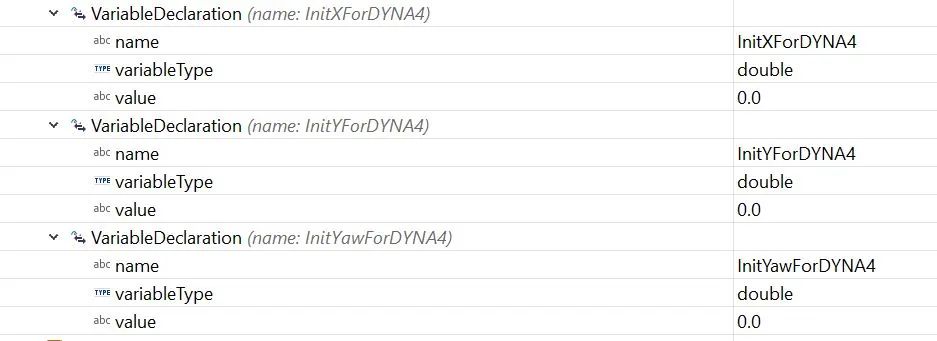
圖8:OpenSCENARIO中的變量關聯
舉例如下:
>
通過bind_signal_source接口將OpenSCENARIO中的Variable綁定到System Variable橋中;
>
通過VariableAction接口將OpenSCENARIO中預定義的Parameter值傳導給Variable;
>
DYNA4接收到初始化指令,按照系統變量中的坐標值初始化自車,根據OpenSCENARIO中交通參與者的參數初始化交通參與者。
2)、自車啟動
駕駛員通過加速踏板、制動踏板和方向盤操控自車,自車的行為會通過RTK設備測量,結果會通過總線傳給CANoe,再關聯到DYAN4中進行實時渲染。
3)、實現碰撞點
交通參與者會通過自車的位置和速度,在定義的時刻開啟運動,并實現碰撞。
4)、分析結果
測試結束后,測試數據會被記錄以用于后續分析:
RTK設備的總線記錄文件中會記錄自車的位置、速度信息;
DYNA4中的Traffic Sensor模塊會記錄目標物和自車之間的相對距離、相對速度、相對加速度、TTC;
XCP接口讀取到的ECU內部變量,可以記錄控制器內部算法運行的結果;
DYNAanimation中可以進行仿真畫面的回放。
總體效果如下:
總結與展望
基于CANoe軟件和DYNA4軟件可以實現車輛在環仿真的基本框架,同時具有很強的可拓展性,后續可以基于基礎框架,進一步拓展。后續拓展的可能性有:
>
定制化傳感器模型:例如圖像傳感器,DYNA4團隊可以基于客戶參數定制化畸變模型;
>
多種傳輸協議:CANoe軟件支持多種總線協議,如CAN、LIN、FlexRay、Ethernet等,還可以根據客戶需求集成DDS、ZMQ等傳輸協議。
Vector致力于在ADAS測試領域努力滿足客戶和行業的測試需求,提供高質量的一站式服務。
-
HIL
+關注
關注
2文章
66瀏覽量
17966 -
硬件在環
+關注
關注
2文章
13瀏覽量
11945 -
adas
+關注
關注
310文章
2255瀏覽量
210149 -
CANoe
+關注
關注
4文章
74瀏覽量
9175
原文標題:基于DYNA4和CANoe的ADAS車輛在環(Vehicle In the Loop)測試方案
文章出處:【微信號:VectorChina,微信公眾號:Vector維克多】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
智駕仿真測試實戰之-"虛實融合:ViL功能測試"

《電子發燒友電子設計周報》聚焦硬科技領域核心價值 第9期:2025.04.21--2025.04.25
ADAS1000-4 adi

CANoe仿真HTTP節點的實戰秘籍大公開
智能駕駛整車在環實驗室SYNO解決方案
基于DYNA4的智能大燈控制算法的仿真閉環測試

汽車HiL測試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術

“亦”真“亦”假?——MXsteerWheel與DYNA4的強強聯手
輕松上手CANoe Scenario Editor—智能網聯工程師入門篇
【干貨分享】硬件在環仿真(HiL)測試






 工商網監
工商網監
評論