") 使用高速同步采樣ADC精確捕獲伺服電機位置
使用高速同步采樣ADC精確捕獲伺服電機位置

自主無人機和機器人利用快速、高分辨率、更小的電機。這些快速旋轉(zhuǎn)的微型電機需要更多的微型編碼器和小型化IC封裝尺寸。本文介紹了光學正弦編碼器如何通過 2mm x 3mm 雙通道同時采樣 SAR-ADC 提供更高的分辨率和更高的速度。
介紹
從生產(chǎn)車間到自主無人機,機器人就在我們身邊,利用快速、高分辨率、更小的電機。這種快速旋轉(zhuǎn)的微型電機需要微型編碼器和小型化 IC 封裝尺寸。
所有這些設計規(guī)范似乎是相互排斥的;例如,更快的信號編碼器轉(zhuǎn)換通常會損害分辨率。這種系統(tǒng)設計對設計人員來說具有挑戰(zhàn)性,因為快速旋轉(zhuǎn)的電機不斷需要互補的采樣速度。機器人執(zhí)行的基本任務是運動和傳感,編碼器中具有高分辨率和快速轉(zhuǎn)換速率的模數(shù)轉(zhuǎn)換器(ADC)是其功能的核心。
本文簡要討論了與為速度更快的旋轉(zhuǎn)電機實現(xiàn)小型高精度電機編碼器相關的問題。本文介紹了一款具有雙通道同時采樣、逐次逼近寄存器模數(shù)轉(zhuǎn)換器(SAR-ADC)的編碼器,以及如何利用內(nèi)部基準電壓源和雙通道同時采樣輸入級。
電機編碼器
增量編碼器是一種機電運動檢測器。它有兩個輸出信號,A和B,指示運動方向和行進距離。這些信號共同決定了方向和速度。來自編碼器的第三個信號確定電機的位置。
增量編碼器有兩種類型是線性編碼器和旋轉(zhuǎn)編碼器。線性編碼器在單個維度或方向上移動物品,并將線性位置轉(zhuǎn)換為電子信號。旋轉(zhuǎn)編碼器繞軸移動物品,并將旋轉(zhuǎn)位置或角度轉(zhuǎn)換為電子信號。每個輸出信號對應于軸的恒定角度變化。電機通常使用增量式旋轉(zhuǎn)編碼器來執(zhí)行方向、速度和位置跟蹤(圖 2)。
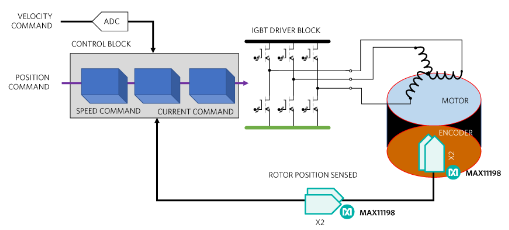
圖2.電機有效地利用旋轉(zhuǎn)編碼器,量化電機的方向、速度和位置。
兩種常見的增量式旋轉(zhuǎn)編碼器具有數(shù)字或正弦信號輸出。數(shù)字增量式旋轉(zhuǎn)編碼器在磁盤上具有輸出 50% 占空比、高或低數(shù)字信號的模式。
數(shù)字編碼器
光學數(shù)字編碼器通過電機輪的插槽傳輸光線。光接收機在光線出現(xiàn)時記錄高數(shù)字輸出,在黑暗中記錄低數(shù)字輸出(圖 3)。
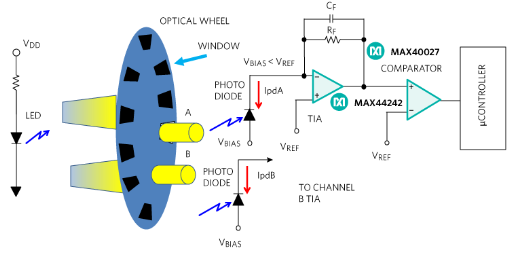
圖3.顯示通道A和通道B的光學數(shù)字編碼器,其中通道B復制通道A信號鏈。
在電機輪的另一側(cè),光電二極管(圖3)和跨阻放大器檢測數(shù)字光脈沖。跨阻放大器的接口通過低輸入 0.5pA 輸入偏置電流和 5nV/√Hz @ 1kHz 低噪聲補充光電二極管。通道A和B中的信號通過各自的比較器到達微控制器,微控制器捕獲最終的數(shù)字事件。通道A和B排列的關鍵是微控制器同時鎖存這兩個信號。
在圖3中創(chuàng)建一個穩(wěn)定的TIA電路以消除不確定性非常重要。反饋電阻(RF)和反饋電容(CF) 與放大器的輸入電容(C微分+ C歐蒙模式= C放大 器)和光電二極管寄生電容(C帕金森).最高效的TIA電路是具有65°相位裕量、巴特沃茲響應的電路。該相位裕量幅度產(chǎn)生5%的階躍響應過沖。公式1顯示了模擬巴特沃茲響應的TIA計算。
CF= 2* ((C帕金森+ C放大 器) /(2 π RFf英鎊)) - C射頻
其中 f英鎊是單位增益穩(wěn)定放大器和C的增益帶寬乘積射頻是寄生射頻電容。
公式1允許電路設計人員改變放大器帶寬/輸入電容以及反饋電阻值。有關 TIA 穩(wěn)定性的更多信息,請參閱 TIA 基礎知識:噪聲傳遞函數(shù)第 4 部分。
在圖 3 中,兩個光通道 A 和 B 收集電機的方向和速度數(shù)據(jù)。為了測量方向,光學器件的位置和每個光學輪窗口之間的距離在A和B方波之間建立了90度相位。電機方向與相位角的符號有關。如果 A 通道的上升沿先于 B 通道的上升沿,則相位差為正(圖 4.a)。
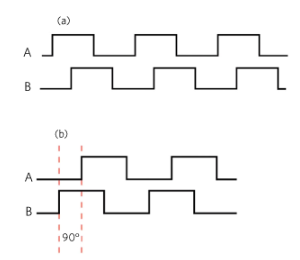
圖4.編碼器同時捕獲數(shù)字通道A和通道B信號。
如圖4.b所示,如果A通道的上升沿跟隨B通道的上升沿上升沿,則相位差為負。
A或B方波的頻率決定了電機速度。
圖 3 中的機械結(jié)構(gòu)在一個電機軸旋轉(zhuǎn)中產(chǎn)生多個周期。編碼器制造商生產(chǎn)的增量式數(shù)字旋轉(zhuǎn)編碼器(和增量正弦/余弦旋轉(zhuǎn)編碼器)每轉(zhuǎn) 50 到 5,000 個周期。
除了數(shù)字信號外,車輪上還有一個參考標記,用于確定電機的旋轉(zhuǎn)位置。設計工程師將參考標記稱為 360 度電機輪周長的 0° 角。數(shù)字脈沖參考標記計數(shù)決定了電機的確切旋轉(zhuǎn)位置。
正弦編碼器
增量式正弦編碼器還提供運動方向和行進距離,并帶有一對正交正弦和余弦信號。該編碼器的輸出不是數(shù)字輸出,而是正弦波和余弦波,以更高的速度提供更高的分辨率和運動距離。
這種類型的編碼器有三個信號:正弦、余弦和參考脈沖(圖 5)。
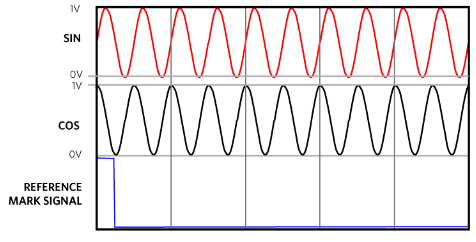
圖5.正弦信號由正弦波和余弦波組成,編碼器同時對兩個信號進行采樣。
模擬正弦編碼器需要一個全模擬信號鏈。從正弦編碼器信號中提取可靠的位置和速度信息具有一定的模擬信號預調(diào)理。在ADC的第一個輸入端,將SIN和COS信號(通常為1Vpp輸入信號范圍)轉(zhuǎn)換為差分信號。差分信號可確保最大的抗擾度,并提供適當放大和電平轉(zhuǎn)換所得單端SIN和COS信號的機會,為模數(shù)轉(zhuǎn)換器(ADC)輸入級做準備。
每轉(zhuǎn)都有多個信號周期。產(chǎn)生的正弦/余弦頻率取決于信號周期數(shù)和每分鐘轉(zhuǎn)數(shù)。例如,下面的等式顯示了編碼器的正弦/余弦頻率,該編碼器一轉(zhuǎn)有4,096個周期,電機以每分鐘1,400轉(zhuǎn)的速度旋轉(zhuǎn)(公式2):
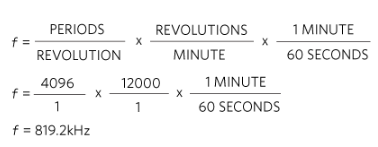
在本例中,信號鏈解決方案帶寬至少為1600kHz。這種閉環(huán)控制系統(tǒng)需要極低的零延遲,而雙通道同步采樣ADC可提供這種零延遲。編碼器輸出為 1 VP-P(典型值),具有差分正弦和余弦輸出信號。
模擬信號鏈要求如下:
兩個同步采樣ADC:ADC1提供正弦輸出,ADC2提供余弦輸出。
無系統(tǒng)延遲:最好是SAR(逐次逼近寄存器)轉(zhuǎn)換器(相對于ΔΣ或流水線轉(zhuǎn)換器)
超過800 kHz的帶寬,因此ADC以大于每通道1600 ksps的最小速率進行轉(zhuǎn)換,以滿足奈奎斯特定理。
2-5P-P差分輸入。
最佳解決方案是雙通道同步采樣 SAR ADC(圖 5)。
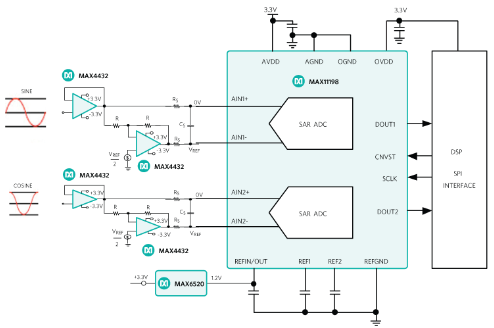
圖6.輸入頻率為800 kHz的雙通道同步采樣2 Msps ADC通過電機線圈正弦信號確定電機的方向和速度。
在圖6中,兩個單電源運算放大器將輸入信號轉(zhuǎn)換為差分信號,以驅(qū)動全差分ADC。ADC的外部1.2V基準電壓源為16位轉(zhuǎn)換提供了一個穩(wěn)壓良好的基準點。通過兩個同步采樣通道,ADC的每通道輸出數(shù)據(jù)速率為2 Msps,可滿足規(guī)定的要求。
在本例中,2mm x 3mm TDFN MAX11198為16位ADC,正弦增量式旋轉(zhuǎn)編碼器一轉(zhuǎn)4,096個周期。測量步驟總數(shù)的計算公式為(公式3):
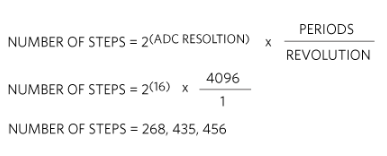
這種方法為設計人員提供了 16 位 ADC 分辨率和 4096 周期 (4096 = 212) 表示 16 + 12 或 28 位分辨率或 1.341 × 度以內(nèi)的旋轉(zhuǎn)位置精度。
結(jié)論
本文簡要討論了與為速度更快的旋轉(zhuǎn)電機實現(xiàn)小型高精度電機編碼器相關的問題。本文介紹了一款具有雙路同時采樣SAR-ADC的編碼器,并探討了如何利用內(nèi)部基準電壓源和雙路同時采樣輸入級。
電機控制反饋路徑中有兩種典型的編碼器實現(xiàn)方式:線性和旋轉(zhuǎn)。我們 從 模擬 信號 鏈 角度 評估 了 增量 式 數(shù)字 和 正弦 輸出 的 輸出 信號 特性, 確保 信號 完整性 和 最佳 性能。
光學數(shù)字編碼器提供高分辨率。但是,光學正弦編碼器以更高的速度提供更高的分辨率。
審核編輯:郭婷
-
編碼器
+關注
關注
45文章
3786瀏覽量
137579 -
adc
+關注
關注
99文章
6671瀏覽量
548688 -
電機
+關注
關注
143文章
9275瀏覽量
148848
發(fā)布評論請先 登錄
磁旋轉(zhuǎn)編碼器在永磁同步電機位置測量中的應用(可下載)
舵機與伺服電機有的區(qū)別

伺服電機位置誤差原因和維修
伺服電機工作原理詳解 伺服電機與步進電機工作原理比較
永磁同步電機與伺服電機的對比
伺服電機在機器人中的應用有哪些
伺服電機原理及控制應用
什么是伺服電機?伺服電機的工作原理是什么?
步進電機伺服控制系統(tǒng)的作用
ADS8578S 14位、高速8通道同步采樣ADC數(shù)據(jù)表

ADS8588S 16位、高速4通道、同步采樣ADC數(shù)據(jù)表
ADS8588S 16位、高速8通道、同步采樣ADC數(shù)據(jù)表
ADS8588S 16位、高速6通道、同步采樣ADC數(shù)據(jù)表
伺服電機轉(zhuǎn)速調(diào)整方法
ams OSRAM-位置傳感器選型概要





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論