 北理工團隊在《Science Advances》發表關于水凝膠微機器人的研究成果
北理工團隊在《Science Advances》發表關于水凝膠微機器人的研究成果
北京理工大學智能機器人研究所王化平教授團隊在微納機器人與生物醫學工程領域取得重要進展,12月14日,其研究成果“基于可編程非均一電沉積的模塊化水凝膠微機器人”(Programmable aniso-electrodeposited modular hydrogel microrobots),以研究長文(Research Article)形式在線發表于科學子刊《科學進展》 (Science Advance)。該成果首創了一種可集成不同功能與形變模塊的任意構型單薄膜軟體微機器人一體化制造方法,從而解決了微機器人在人體等活體封閉環境下同時開展顯影、給藥、修復等多序列復雜任務作業的適應性問題,為癌癥等重大疾病開發更智能、更集成、更高效的治療手段提供了新思路。
機電學院王化平教授及德國馬普所Metin Sitti教授為論文通訊作者,機電學院博士畢業生鄭志強(馬普所博士后)為論文第一作者,北京理工大學是該論文第一完成單位。
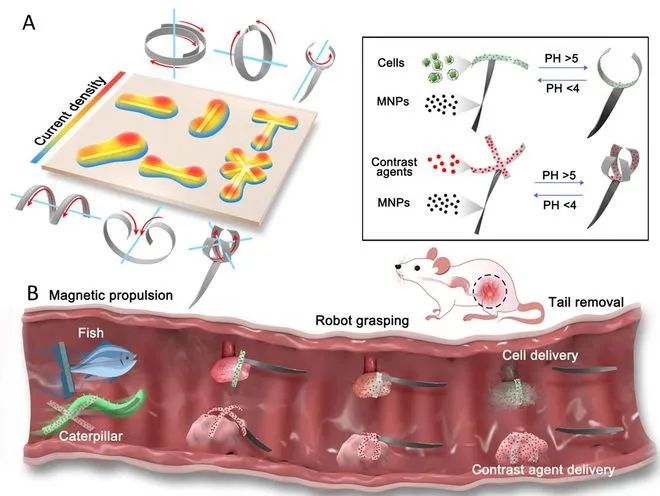
模塊化軟體微機器人的非均一電沉積制造原理及活體作業示意圖
近年來,軟體微機器人因其形態可變性、物理適應性、交互友好性而得到廣泛關注,在癌癥靶向治療等個性化先端醫療領域展現出巨大潛力。目前,微機器人通過搭載特定物質并在光、電、磁等物理場刺激下運動、形變可以完成特定任務。然而,微小的機器人本體大多僅能搭載特定單一功能,難以應對活體真實場景下多序列復雜作業的任務需求。相比之下,自然界生物通過長期演化具備了驅動、傳感、決策、作業等不同功能模塊,能夠有效適應復雜環境。以此為啟發,開發能夠兼具多種成分與復合功能的模塊化微機器人,對于靈活開展生物體內全流程作業,大幅提升無創醫療的智能化與高效化具有重要意義。
▍模塊化、集成化設計——變革微機器人復合制造模式
該團隊在前期研究自形變褐藻酸微機器人的基礎上(Nature Communications, vol. 12(1), 2021. https://doi.org/10.1038/s41467-020-20697-w),進一步探索了褐藻酸液體如何在非均一電場作用下固化為不同大小網格結構組成的凝膠體。發現這些網格結構不僅在受到離子濃度、pH值變化激勵時能夠膨脹、收縮使凝膠整體展現出特定的形變特征,還能像一張網包絡嵌入各種徑粒大小的成分。該發現激發了團隊研發能夠集成不同形變模式、功能成分的模塊化微機器人的靈感。
團隊預先設定微機器人整體形狀并將其劃分為不同模塊區域,在各區域布設與機器人局部形狀匹配的電極并分別注入混有不同功能成分的褐藻酸溶液。通過調節各區域電場方向與梯度,以多區域的同步電沉積固化集成了微機器人本體。這樣的微機器人不僅具備可降解褐藻酸凝膠單薄膜整體構型,各局部模塊還能保持其獨有的形變模式與生物功能,改變了當前復合軟體微機器人繁瑣的制造模式,大幅提升了單薄膜微機器人的功能性。

具有多重形變模式與復合生物功能的模塊化微機器人制造流程
▍多成分、多模態復合——服務靶向醫療任務全流程
通過模塊化軟體微機器人制造方法,團隊設計了經典的條狀微機器人本體結構,并為其不同模塊區域搭載了磁性納米顆粒、造影劑(如微泡和熒光納米顆粒)、功能性細胞、靶向藥物等不同物質,使其能夠兼具磁驅動、封閉空間顯影反饋、靶向作業等性能。通過賦予微機器人本體不同模塊特定的形變模式,使其能夠感知生物活體環境中變化的體液離子濃度與pH值,發生局部區域同軸、異軸形變并通過磁驅動模仿毛蟲蠕動、魚類擺尾,實現運輸、投遞、移植、回收、降解等多序列復雜任務,有望在未來個性化靶向醫療中大展拳腳。
模塊化微機器人進行功能性細胞的“運輸-投遞-移植-回收”多序列作業 通過有效利用該模塊化軟體微機器人加工策略,團隊未來將繼續探索多模塊微機器人的單體控制與群體協作方法,為復雜活體環境下的跨域協同與自適應作業提供使能支撐,服務病灶定位、給藥、修復等精準醫療任務全流程。 ▍團隊介紹北理工生物微納操作團隊依托機電學院,面向世界前沿,在微納機器人、微納生物制造等方面已開展了一系列研究,相關成果發表在Science Advance、Nature Communications,Lab on a Chip、Biofabrication、IEEE Trans匯刊等國際知名期刊。此次論文以北京理工大學為第一單位,相關工作由機電學院與德國馬普所研究團隊合作完成,展現了團隊在微納機器人技術領域積極探索國際合作模式、提升國際影響力取得階段性進展。
審核編輯 :李倩
-
機器人
+關注
關注
213文章
29525瀏覽量
211696 -
模塊化
+關注
關注
0文章
339瀏覽量
21839
原文標題:北理工團隊在《Science Advances》發表關于水凝膠微機器人的研究成果
文章出處:【微信號:tjrobot,微信公眾號:天津機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
輪式移動機器人電機驅動系統的研究與開發
NVIDIA在ICRA 2025展示多項最新研究成果
安森美在自主移動機器人領域的發展成果
佛山智能裝備院與華數機器人在具身智能工業機器人領域的研究成果

廣汽集團榮獲廣東省機器人科學技術獎一等獎
北理工實現量子全息顯微技術突破
寧德時代自研機器人團隊成立
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
【「具身智能機器人系統」閱讀體驗】1.初步理解具身智能
中國科大:在機器人觸覺傳感器研究中取得重要進展






 工商網監
工商網監
評論