") 毫末2023自動(dòng)駕駛趨勢(shì)預(yù)測(cè):超算中心成自動(dòng)駕駛企業(yè)入門(mén)配置,重感知技術(shù)領(lǐng)跑城市導(dǎo)航輔助
毫末2023自動(dòng)駕駛趨勢(shì)預(yù)測(cè):超算中心成自動(dòng)駕駛企業(yè)入門(mén)配置,重感知技術(shù)領(lǐng)跑城市導(dǎo)航輔助

2023年1月5日,第七屆HAOMO AI DAY在北京舉辦。正值歲末年初,中國(guó)自動(dòng)駕駛屆開(kāi)年盛會(huì)精彩來(lái)襲。本屆AI DAY上,毫末分享了2022年三大戰(zhàn)役穩(wěn)健收官成果,展望2023年全球自動(dòng)駕駛發(fā)展趨勢(shì),并發(fā)布毫末技術(shù)、產(chǎn)品最新成果。

(第七屆HAOMO AI DAY在北京舉辦)
毫末智行智算中心“雪湖·綠洲”(MANA OASIS)重磅發(fā)布,這是中國(guó)自動(dòng)駕駛行業(yè)最大智算中心,每秒浮點(diǎn)運(yùn)算達(dá)到67億億次。有了MANA OASIS的加持,毫末MANA五大模型全新亮相升級(jí),車(chē)端感知架構(gòu)實(shí)現(xiàn)跨代升級(jí),毫末的技術(shù)棧布局繼續(xù)保持完整領(lǐng)先的態(tài)勢(shì),尤其在感知、認(rèn)知等層面領(lǐng)跑行業(yè),引領(lǐng)大模型、大算力、大數(shù)據(jù)發(fā)展方向,沖刺進(jìn)入自動(dòng)駕駛3.0時(shí)代。

(毫末智行與火山引擎合作:建成中國(guó)自動(dòng)駕駛行業(yè)最大智算中心MANA OASIS)
產(chǎn)品層面,2024年上半年,毫末城市NOH落地將達(dá)到100城,這是中國(guó)第一個(gè)可大規(guī)模落地的城市導(dǎo)航輔助駕駛,以重感知、大模型的技術(shù)路線及技術(shù)應(yīng)用、用戶(hù)閉環(huán)的數(shù)據(jù)建設(shè)等方向保持領(lǐng)先位置,2025年毫末HPilot全面進(jìn)入全無(wú)人駕駛時(shí)代。

毫末智行董事長(zhǎng)張凱表示,2023年,毫末將繼續(xù)把安全、可靠、實(shí)用的智能駕駛產(chǎn)品快速、大規(guī)模推向市場(chǎng),贏得廣大用戶(hù)的認(rèn)可和肯定。
2023十大自動(dòng)駕駛趨勢(shì)預(yù)測(cè)重磅發(fā)布,毫末2023年四大戰(zhàn)役正式打響
“過(guò)去三年是毫末穿越創(chuàng)業(yè)生死線的關(guān)鍵期,但三年只是創(chuàng)業(yè)漫長(zhǎng)旅程的開(kāi)端。”張凱以《春歸有期,AI照亮未來(lái)》為主題,回顧了毫末2022年發(fā)展成果,并公布了2023年發(fā)展規(guī)劃。

(毫末智行董事長(zhǎng)張凱進(jìn)行主題演講)
張凱表示“2022毫末三大戰(zhàn)役穩(wěn)健收官。”2022年毫末持續(xù)穩(wěn)居中國(guó)量產(chǎn)自動(dòng)駕駛第一名,三代HPilot產(chǎn)品搭載至魏牌、坦克、歐拉、長(zhǎng)城炮等近20款車(chē)型,輔助駕駛用戶(hù)行駛里程突破2500萬(wàn)公里;毫末城市NOH是中國(guó)第一個(gè)可大規(guī)模量產(chǎn)的城市導(dǎo)航輔助駕駛產(chǎn)品,目前軟件封版達(dá)到交付狀態(tài);末端物流自動(dòng)配送車(chē)已初步完成商業(yè)閉環(huán),交付超1000臺(tái),小魔駝配送訂單量突破13萬(wàn)單,商業(yè)化進(jìn)程正全面提速;MANA學(xué)習(xí)時(shí)長(zhǎng)超42萬(wàn)小時(shí),虛擬駕齡相當(dāng)于人類(lèi)司機(jī)5.5萬(wàn)年。此外,毫末自研的AEB算法助力魏牌、歐拉、坦克的四款車(chē)型獲得E-NCAP(歐洲新車(chē)安全評(píng)鑒協(xié)會(huì))、ANCAP(澳大利亞新車(chē)安全評(píng)鑒協(xié)會(huì))五星安全認(rèn)證,搭載毫末HPilot的300臺(tái)摩卡DHT-PHEV車(chē)型也已奔赴歐洲。毫末不但是中國(guó)首個(gè)自研AEB算法落地海內(nèi)外的公司,也是中國(guó)首個(gè)出海歐洲、澳洲的自動(dòng)駕駛公司。

(毫末穩(wěn)居中國(guó)量產(chǎn)自動(dòng)駕駛第一名)
毫末在乘用車(chē)領(lǐng)域產(chǎn)品高速迭代的背后,是毫末打造的業(yè)內(nèi)獨(dú)有的產(chǎn)品能力迭代鐵三角:即場(chǎng)景化用戶(hù)體驗(yàn)設(shè)計(jì)、人工智能技術(shù)、技術(shù)工程化能力。基于此,MANA已形成了強(qiáng)大的數(shù)據(jù)智能驅(qū)動(dòng)體系,它包含六大閉環(huán):用戶(hù)需求閉環(huán)、研發(fā)效能閉環(huán)、產(chǎn)品自完善閉環(huán)、數(shù)據(jù)積累閉環(huán)、數(shù)據(jù)價(jià)值閉環(huán)、業(yè)務(wù)工程化閉環(huán)。
用戶(hù)需求閉環(huán)中,毫末已建立5大維度、264類(lèi)核心用戶(hù)需求,日常可以從大量核心場(chǎng)景數(shù)據(jù)中提取核心問(wèn)題;研發(fā)效能閉環(huán)則通過(guò)仿真工具提升研發(fā)效能。目前毫末仿真在研發(fā)中覆蓋率超過(guò)70%,研發(fā)效能較兩年前提升8倍;產(chǎn)品自完善閉環(huán),讓毫末的產(chǎn)品自完善閉環(huán)率超過(guò)70%,助力客戶(hù)成功實(shí)現(xiàn)7次OTA在線升級(jí);數(shù)據(jù)積累閉環(huán)中,毫末通過(guò)自研自動(dòng)化數(shù)據(jù)采集、自動(dòng)化數(shù)據(jù)標(biāo)注工具,在2022年底數(shù)據(jù)成本降低98%;數(shù)據(jù)價(jià)值閉環(huán),讓毫末的全新車(chē)型復(fù)用開(kāi)發(fā)只需4個(gè)月時(shí)間即達(dá)到量產(chǎn)落地狀態(tài),全新車(chē)型匹配標(biāo)定2個(gè)月內(nèi)匹配完成,標(biāo)定效率全行業(yè)第一;業(yè)務(wù)工程化閉環(huán),讓毫末可以做到智駕產(chǎn)品100%一次性過(guò)線率,毫末成為國(guó)內(nèi)唯一的智能駕駛技術(shù)工程化經(jīng)驗(yàn)最豐富的公司。

(毫末MANA六大閉環(huán)構(gòu)建領(lǐng)先數(shù)據(jù)驅(qū)動(dòng)體系)
張凱在現(xiàn)場(chǎng)講到,毫末數(shù)據(jù)智能驅(qū)動(dòng)體系的六大閉環(huán)能力,助力客戶(hù)的智能汽車(chē)快速規(guī)模化量產(chǎn),真正為用戶(hù)釋放價(jià)值,使智能汽車(chē)的智能駕駛系統(tǒng)從用戶(hù)嘗鮮階段過(guò)渡到用戶(hù)依賴(lài)階段。毫末成為中國(guó)最早且唯一一個(gè)進(jìn)入產(chǎn)品快速迭代階段的自動(dòng)駕駛公司。
“2023年,智能駕駛下半場(chǎng)的競(jìng)爭(zhēng)將進(jìn)入加速期,高階智能駕駛產(chǎn)品商業(yè)應(yīng)用將迎來(lái)大規(guī)模落地。”基于這一基礎(chǔ)判斷,張凱從行業(yè)、技術(shù)、產(chǎn)品、人才等方面對(duì)2023年自動(dòng)駕駛行業(yè)發(fā)展做出十大預(yù)測(cè)。
行業(yè)層面,2023年自動(dòng)駕駛將全面進(jìn)入3.0時(shí)代;高級(jí)別智能駕駛將成為中端車(chē)型標(biāo)配;全新一代芯片、傳感器進(jìn)入市場(chǎng),自動(dòng)駕駛生態(tài)呈現(xiàn)更豐富多樣性。技術(shù)層面,大模型在數(shù)據(jù)合成、知識(shí)提取等方面的能力將助力自動(dòng)駕駛迭代速度實(shí)現(xiàn)量級(jí)提升;自動(dòng)駕駛系統(tǒng)比拼將由功能競(jìng)爭(zhēng)轉(zhuǎn)變?yōu)橥ㄇ谛矢?jìng)爭(zhēng);超算中心會(huì)成為自動(dòng)駕駛企業(yè)的入門(mén)配置。產(chǎn)品層面,城市導(dǎo)航輔助駕駛進(jìn)入重感知階段,大規(guī)模量產(chǎn)交付大幕拉開(kāi);智能駕駛的用戶(hù)體驗(yàn)將從嘗鮮轉(zhuǎn)變?yōu)橛脩?hù)依賴(lài);末端物流自動(dòng)配送車(chē)整體成本降至10萬(wàn)元以?xún)?nèi),將進(jìn)一步改善生產(chǎn)關(guān)系。人才領(lǐng)域,張凱判斷AI自動(dòng)駕駛領(lǐng)域激烈的人才競(jìng)爭(zhēng)將會(huì)延續(xù)到2023年。

(毫末重磅發(fā)布2023自動(dòng)駕駛行業(yè)十大趨勢(shì)預(yù)測(cè))
面對(duì)未來(lái)所要迎接的趨勢(shì)和機(jī)遇,張凱正式宣布毫末2023年發(fā)展規(guī)劃,毫末打響“2023年四大戰(zhàn)役”。最重頭的是“智能駕駛裝機(jī)量王者之戰(zhàn)”,毫末將完成多平臺(tái)、數(shù)十款車(chē)型、數(shù)十個(gè)項(xiàng)目的異步并行開(kāi)發(fā),通過(guò)智能駕駛流程化開(kāi)發(fā)和標(biāo)準(zhǔn)化交付,進(jìn)一步推進(jìn)未來(lái)搭載毫末輔助駕駛產(chǎn)品的乘用車(chē)達(dá)百萬(wàn)量級(jí)的目標(biāo);其次是“MANA大模型巔峰之戰(zhàn)”,毫末將在智算中心助推下,將大模型的應(yīng)用落地進(jìn)行到底;第三場(chǎng)戰(zhàn)役是“城市NOH百城大戰(zhàn)”,毫末城市NOH將有序落地到國(guó)內(nèi)100個(gè)城市,引領(lǐng)城市導(dǎo)航輔助駕駛的大規(guī)模量產(chǎn)落地;最后是“末端物流自動(dòng)配送商業(yè)之戰(zhàn)”,毫末將繼續(xù)堅(jiān)持5S合作服務(wù)模式,助力合作伙伴快速實(shí)現(xiàn)產(chǎn)品和解決方案落地,加速無(wú)人配送行業(yè)應(yīng)用進(jìn)程。

(張凱宣布毫末正式打響“2023四大戰(zhàn)役”)
“毫末始終認(rèn)為,偉大的機(jī)遇要靠?jī)?nèi)在的實(shí)力去把握,在激烈市場(chǎng)競(jìng)爭(zhēng)中取勝的關(guān)鍵,仍然是掌握核心技術(shù)。”演講中張凱強(qiáng)調(diào)了毫末在技術(shù)研發(fā)投入上的堅(jiān)定決心。截止目前,毫末已獲得專(zhuān)利證書(shū)146件,全面覆蓋數(shù)據(jù)融合、智能感知、智能決策、控制執(zhí)行、模型算力提升等領(lǐng)域。“未來(lái),技術(shù)研發(fā)仍將是毫末投入的重中之重。”

(張凱表示,技術(shù)研發(fā)是毫末未來(lái)發(fā)展重中之重)
中國(guó)自動(dòng)駕駛最大智算中心MANA OASIS成立,毫末五大模型全新亮相升級(jí)
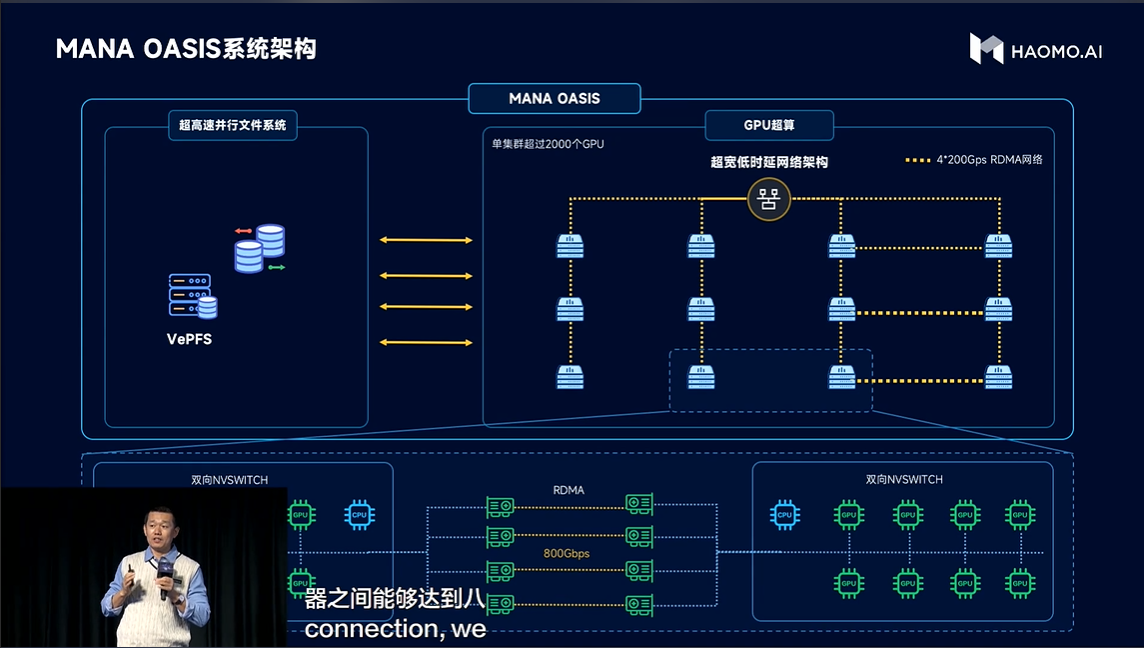
第七屆HAOMO AI DAY,毫末智行宣布智算中心“雪湖·綠洲”(MANA OASIS)正式成立。MANA OASIS是中國(guó)自動(dòng)駕駛行業(yè)最大智算中心,由毫末智行與火山引擎聯(lián)合打造,每秒浮點(diǎn)運(yùn)算達(dá)67億億次,存儲(chǔ)帶寬每秒2T,通信帶寬每秒800G。

(顧維灝表示,MANA OASIS將助力毫末沖刺進(jìn)入自動(dòng)駕駛3.0時(shí)代)
毫末智行CEO顧維灝表示,“MANA OASIS讓毫末擁有了超級(jí)計(jì)算能力,數(shù)據(jù)、算力充沛,毫末的技術(shù)產(chǎn)品能力將更加強(qiáng)大。在‘MANA OASIS’加持下,毫末將沖刺進(jìn)入自動(dòng)駕駛3.0時(shí)代。”
火山引擎總裁譚待表示,“我們很榮幸與毫末智行一道在智算中心領(lǐng)域達(dá)成深度合作,共同推動(dòng)自動(dòng)駕駛智能訓(xùn)練平臺(tái)跨越式發(fā)展,加速自動(dòng)駕駛技術(shù)敏捷迭代和商業(yè)化落地。”

(毫末智行智算中心“雪湖·綠洲”每秒浮點(diǎn)運(yùn)算達(dá)67億億次)
數(shù)據(jù)驅(qū)動(dòng)是自動(dòng)駕駛發(fā)展的方向與趨勢(shì),海量的產(chǎn)品數(shù)據(jù)、超大規(guī)模的數(shù)據(jù)訓(xùn)練、大模型的應(yīng)用等,都對(duì)算力提出了更龐大的需求。基于火山引擎豐富的大數(shù)據(jù)積累和底層技術(shù),MANA OASIS實(shí)現(xiàn)的計(jì)算、存儲(chǔ)、通訊能力,讓數(shù)據(jù)更快速轉(zhuǎn)化成知識(shí),以實(shí)現(xiàn)將本增效的目的。
在數(shù)據(jù)管理能力方面,為充分發(fā)揮智算中心價(jià)值,讓GPU持續(xù)飽和運(yùn)行,毫末歷經(jīng)兩年研發(fā),建立了全套面向大規(guī)模訓(xùn)練的Data Engine,實(shí)現(xiàn)了百P數(shù)據(jù)篩選速度提升10倍、百億小文件隨機(jī)讀寫(xiě)延遲小于500微秒。在算力優(yōu)化方面,毫末與火山引擎合作,部署了Lego高性能算子庫(kù)、ByteCCL通信優(yōu)化能力、以及大模型訓(xùn)練框架。軟硬一體,把算力優(yōu)化到極致。在訓(xùn)練效率方面,基于Sparse MoE,通過(guò)跨機(jī)共享,輕松完成千億參數(shù)大模型訓(xùn)練,且百萬(wàn)個(gè)Clips(毫末視頻最小標(biāo)注單位)訓(xùn)練成本只需百卡周級(jí)別,訓(xùn)練成本降低100倍。
(MANA OASIS基礎(chǔ)能力展示)
在MANA OASIS的加持下,毫末MANA五大模型全新亮相升級(jí),助力毫末自動(dòng)駕駛高速發(fā)展:其中,視覺(jué)自監(jiān)督大模型,讓毫末在中國(guó)首個(gè)實(shí)現(xiàn)4D Clip的自動(dòng)標(biāo)注;3D重建大模型,助力毫末做數(shù)據(jù)生成,用更低成本解決數(shù)據(jù)分布問(wèn)題,提升感知效果;多模態(tài)互監(jiān)督大模型,則可以完成通用障礙物的識(shí)別;動(dòng)態(tài)環(huán)境大模型則進(jìn)一步使用重感知技術(shù),降低對(duì)高精地圖依賴(lài);人駕自監(jiān)督認(rèn)知大模型讓毫末的駕駛策略更加擬人化,安全及順暢。

(MANA五大大模型助力自動(dòng)駕駛能力發(fā)展)
首先,視頻自監(jiān)督大模型,讓毫末4D Clip標(biāo)注實(shí)現(xiàn)100%自動(dòng)化,人工標(biāo)注成本降低98%。為了更低成本、更高效獲取更多高價(jià)值數(shù)據(jù),需要解決從離散幀自動(dòng)化擴(kuò)充到Clips形態(tài)的問(wèn)題。毫末首先利用海量videoclip,通過(guò)視頻自監(jiān)督方式,預(yù)訓(xùn)練出一個(gè)大模型,用少量人工標(biāo)注好的Clip數(shù)據(jù)進(jìn)行Finetune(微調(diào)),訓(xùn)練檢測(cè)跟蹤模型,使得模型具備自動(dòng)標(biāo)注的能力;然后,將已經(jīng)標(biāo)注好的千萬(wàn)級(jí)單幀數(shù)據(jù)所對(duì)應(yīng)的原始視頻提取出來(lái)組織成Clip,其中10%是標(biāo)注幀,90%是未標(biāo)注幀,再將這些Clip輸入到模型,完成對(duì)90%未標(biāo)注幀的自動(dòng)標(biāo)注,進(jìn)而實(shí)現(xiàn)所有單幀標(biāo)注向Clip標(biāo)注的100%的自動(dòng)轉(zhuǎn)化,同時(shí)降低98%的Clip標(biāo)注成本。毫末視頻自監(jiān)督大模型的泛化性效果極佳,即使是在一些非常困難的場(chǎng)景,例如嚴(yán)重遮擋的騎行者,遠(yuǎn)處的小目標(biāo),惡劣的天氣和光照,都能準(zhǔn)確地完成自動(dòng)標(biāo)注。
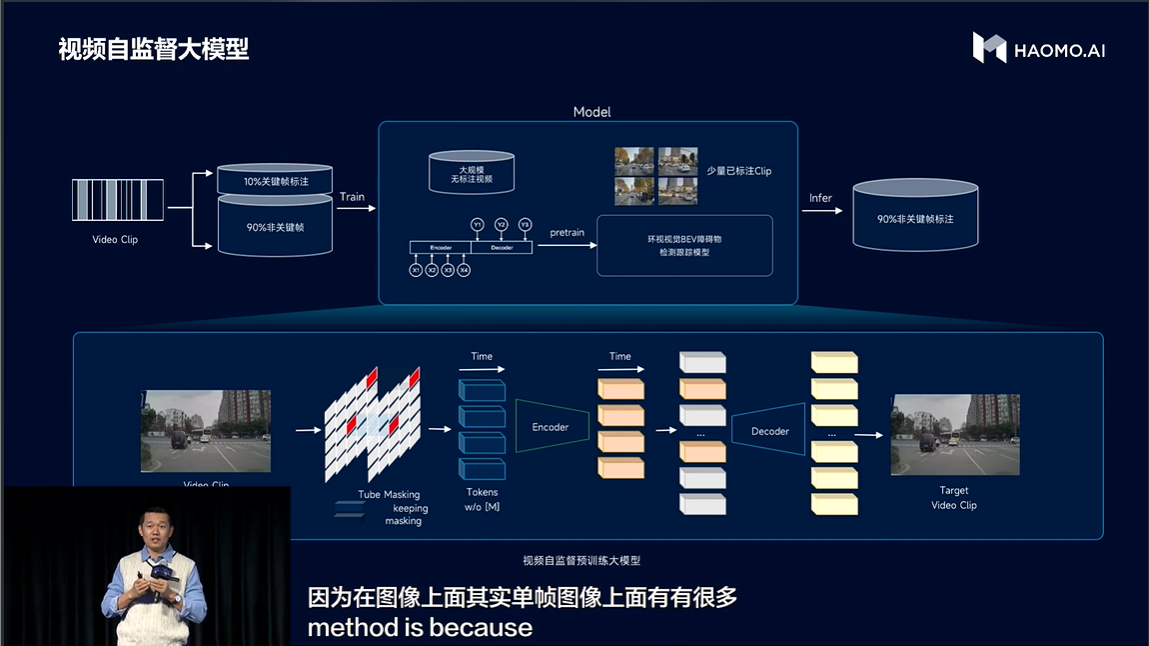
(視覺(jué)自監(jiān)督大模型,可以完成4D Clip的自動(dòng)標(biāo)注)
其次,3D重建大模型,讓毫末實(shí)現(xiàn)了數(shù)據(jù)“無(wú)中生有”,獲得海量corner case(長(zhǎng)尾場(chǎng)景)不再是難事。面對(duì)“完全從真實(shí)數(shù)據(jù)中積累的corner case困難且昂貴”的行業(yè)難題,毫末將爆火的三維重建NeRF技術(shù)應(yīng)用在自動(dòng)駕駛場(chǎng)景重建和數(shù)據(jù)生成中,它通過(guò)改變視角、光照、紋理材質(zhì)的方法,生成高真實(shí)感數(shù)據(jù),實(shí)現(xiàn)以低成本獲取normal case,生成各種高成本corner case。3D重建大模型生成的數(shù)據(jù),不僅比傳統(tǒng)的人工顯式建模再渲染紋理的方法效果更好、成本更低,增加NeRF生成的數(shù)據(jù)后,還可將感知的錯(cuò)誤率降低30%以上。
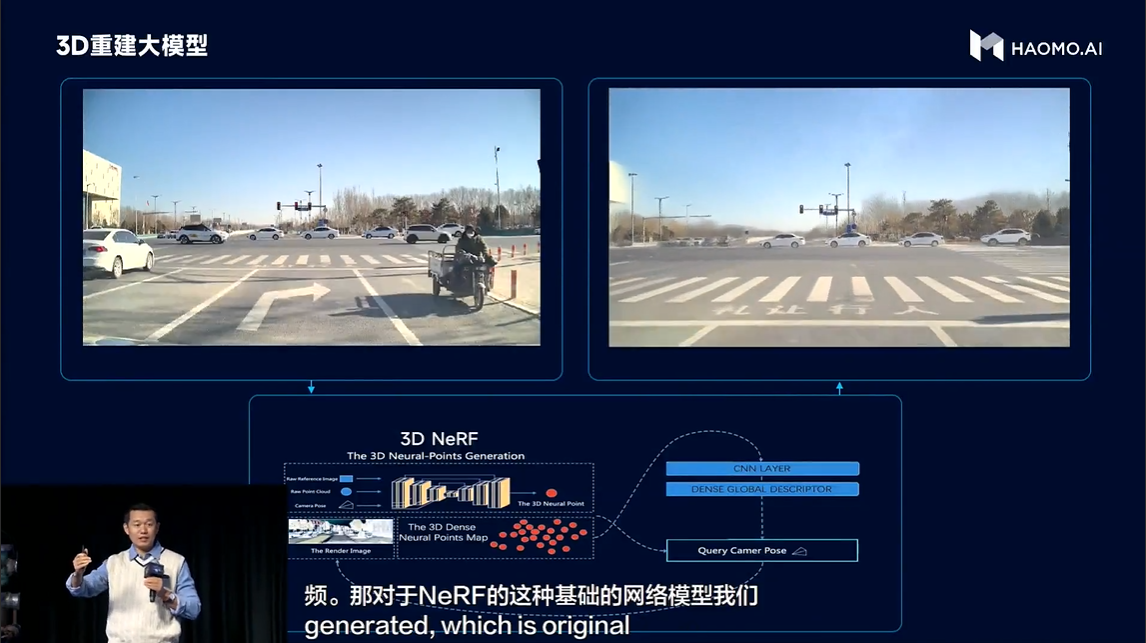
(3D重建大模型,用更低成本解決數(shù)據(jù)分布問(wèn)題,提升感知效果)
第三,多模態(tài)互監(jiān)督大模型,讓車(chē)輛長(zhǎng)出“火眼金睛”,精準(zhǔn)識(shí)別異形障礙物。在成功實(shí)現(xiàn)車(chē)道線和常見(jiàn)障礙物的精準(zhǔn)檢測(cè)后,針對(duì)城市多種異形障礙物的穩(wěn)定檢測(cè)問(wèn)題,毫末正在思考和探索更加通用的解決方案。多模態(tài)互監(jiān)督大模型引入了激光雷達(dá)作為視覺(jué)監(jiān)督信號(hào),直接使用視頻數(shù)據(jù)來(lái)推理場(chǎng)景的通用結(jié)構(gòu)表達(dá)。通用結(jié)構(gòu)的檢測(cè),可以很好地補(bǔ)充已有的語(yǔ)義障礙物檢測(cè),有效提升自動(dòng)駕駛系統(tǒng)在城市復(fù)雜工況下的通過(guò)率。
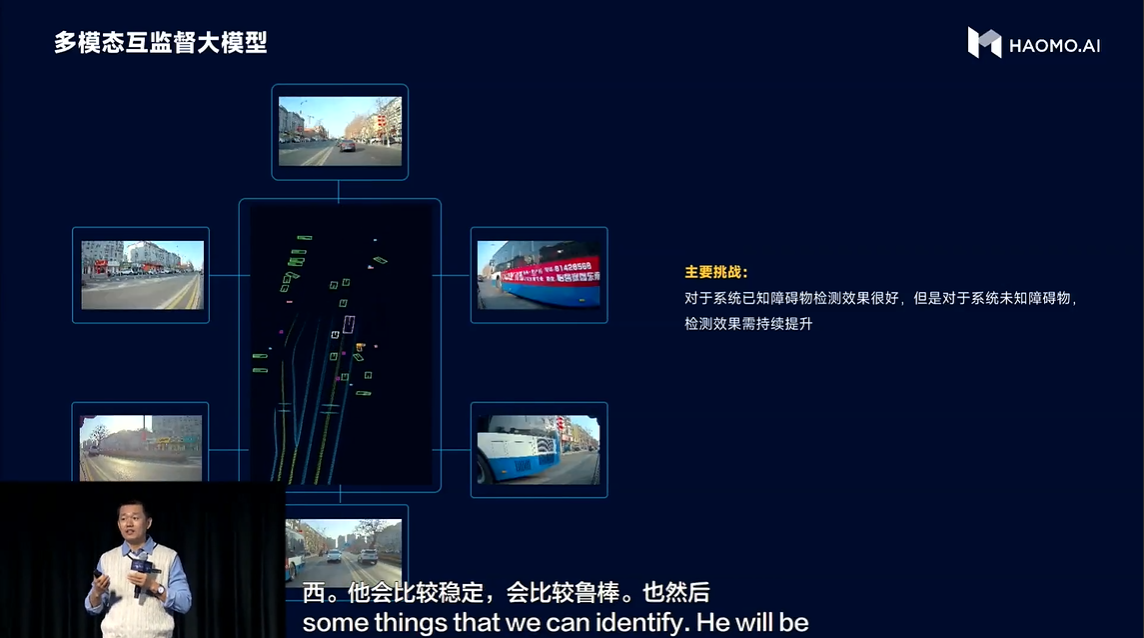
(多模態(tài)互監(jiān)督大模型,可以完成通用障礙物的識(shí)別)
第四,動(dòng)態(tài)環(huán)境大模型,可以精準(zhǔn)預(yù)測(cè)道路的拓?fù)潢P(guān)系,讓車(chē)輛始終行駛在正確的車(chē)道中。在重感知技術(shù)路線下,毫末為了將對(duì)高精地圖的依賴(lài)度降到最低,面臨著“道路拓?fù)浣Y(jié)構(gòu)實(shí)時(shí)推斷”的挑戰(zhàn)。為此,毫末在BEV(鳥(niǎo)瞰圖)的feature map(特征圖)基礎(chǔ)上,以標(biāo)精地圖作為引導(dǎo)信息,使用自回歸編解碼網(wǎng)絡(luò),將BEV特征,解碼為結(jié)構(gòu)化的拓?fù)潼c(diǎn)序列,實(shí)現(xiàn)車(chē)道拓?fù)漕A(yù)測(cè),讓毫末的感知能力,能像人類(lèi)一樣在標(biāo)準(zhǔn)地圖的導(dǎo)航提示下就可以實(shí)現(xiàn)對(duì)道路拓?fù)浣Y(jié)構(gòu)的實(shí)時(shí)推斷。毫末認(rèn)為,解決了路口問(wèn)題實(shí)際就解決了大部分城市NOH問(wèn)題,目前在保定、北京,毫末對(duì)于85%的路口拓?fù)渫茢鄿?zhǔn)確率高達(dá)95%。即便是非常復(fù)雜、非常不規(guī)則的路口,毫末也能準(zhǔn)確預(yù)測(cè)。

(動(dòng)態(tài)環(huán)境大模型,讓毫末進(jìn)一步使用重感知技術(shù),降低對(duì)高精地圖依賴(lài))
第五,人駕自監(jiān)督認(rèn)知大模型,掌握高水平司機(jī)的開(kāi)車(chē)技法,讓駕駛決策更聰明。在探索“使用大量人駕數(shù)據(jù),直接訓(xùn)練模型做出擬人化決策”方面,毫末為了讓模型能夠?qū)W習(xí)到高水平司機(jī)的優(yōu)秀開(kāi)車(chē)方法,全新引入了用戶(hù)真實(shí)的接管數(shù)據(jù),同時(shí)用RLHF(從人類(lèi)反饋中強(qiáng)化學(xué)習(xí))思路先訓(xùn)練一個(gè)reward model(獎(jiǎng)勵(lì)模型)來(lái)挑選出更好的駕駛決策。通過(guò)這種方式,使毫末在掉頭、環(huán)島等公認(rèn)的困難場(chǎng)景中,通過(guò)率提升30%以上。這與AGI領(lǐng)域爆火的ChatGPT的思路相同,通過(guò)人類(lèi)行為反饋來(lái)選出最優(yōu)答案。
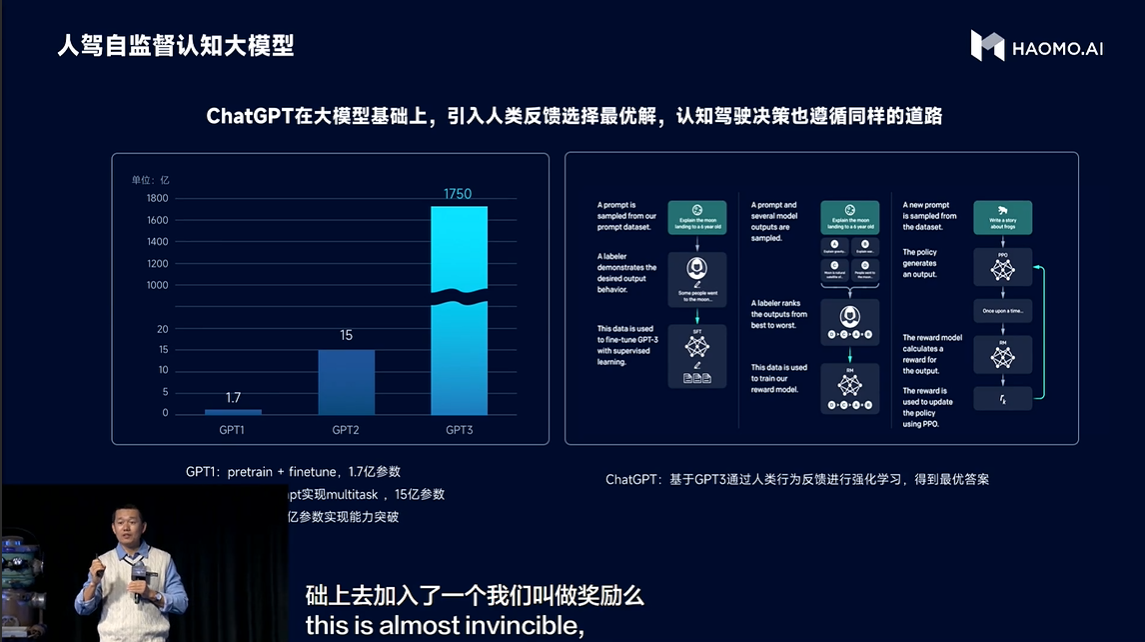
(人駕自監(jiān)督認(rèn)知大模型,毫末的駕駛策略更加擬人化,安全及順暢)
MANA五大模型全面提升了毫末感知和認(rèn)知層面系統(tǒng)化的底層技術(shù)能力。“在五大模型助力下,MANA最新的車(chē)端感知架構(gòu),從過(guò)去分散的多個(gè)下游任務(wù)集成到了一起,形成一個(gè)更加端到端的架構(gòu),包括通用障礙物識(shí)別、局部路網(wǎng)、行為預(yù)測(cè)等任務(wù),毫末車(chē)端感知架構(gòu)實(shí)現(xiàn)了跨代升級(jí)。”顧維灝表示。這也意味著毫末的感知能力更強(qiáng),產(chǎn)品力更強(qiáng),向全無(wú)人駕駛加速邁進(jìn)。

(MANA五大模型助力毫末感知架構(gòu)實(shí)現(xiàn)跨代升級(jí))
2023毫末城市NOH大規(guī)模量產(chǎn)落地,2025全面邁入全無(wú)人駕駛時(shí)代
現(xiàn)場(chǎng)顧維灝正式公布了毫末輔助駕駛產(chǎn)品HPilot的發(fā)展計(jì)劃:預(yù)計(jì)到2024年上半年,毫末將完成HPilot落地中國(guó)100個(gè)城市的計(jì)劃,實(shí)現(xiàn)點(diǎn)點(diǎn)互達(dá)。到2025年,更大規(guī)模全場(chǎng)景的NOH將更快落地,全面邁入全無(wú)人駕駛時(shí)代。

(毫末HPilot發(fā)展規(guī)劃)
顧維灝表示,毫末城市NOH是中國(guó)首個(gè)可大規(guī)模量產(chǎn)的城市導(dǎo)航輔助駕駛。毫末城市NOH的領(lǐng)先性表現(xiàn)在:重感知技術(shù)路線領(lǐng)先,大模型的技術(shù)應(yīng)用領(lǐng)先,用戶(hù)閉環(huán)數(shù)據(jù)建設(shè)領(lǐng)先。

(顧維灝揭秘毫末NOH三大領(lǐng)先性)
自動(dòng)駕駛領(lǐng)域產(chǎn)學(xué)研重磅嘉賓助陣AI DAY,毫末豪華朋友圈持續(xù)擴(kuò)大
自動(dòng)駕駛領(lǐng)域產(chǎn)學(xué)研重磅嘉賓豪華陣容齊聚本屆HAOMO AI DAY。中國(guó)互聯(lián)網(wǎng)協(xié)會(huì)是本屆HAOMO AI DAY指導(dǎo)單位,中國(guó)互聯(lián)網(wǎng)協(xié)會(huì)副理事長(zhǎng)何桂立進(jìn)行了開(kāi)場(chǎng)致辭;中國(guó)科學(xué)院自動(dòng)化研究所復(fù)雜系統(tǒng)管理與控制國(guó)家重點(diǎn)實(shí)驗(yàn)室主任王飛躍,長(zhǎng)江學(xué)者、國(guó)家杰出青年基金獲得者、萬(wàn)人計(jì)劃科技創(chuàng)新領(lǐng)軍人才、北京交通大學(xué)教授趙耀分享了全球自動(dòng)駕駛技術(shù)前沿洞察;火山引擎總裁譚待、達(dá)達(dá)集團(tuán)聯(lián)合創(chuàng)始人兼CTO楊駿、魏牌摩卡商品總監(jiān)徐通、高通公司產(chǎn)品市場(chǎng)高級(jí)總監(jiān)艾和志、歐拉閃電貓商品總監(jiān)曾雷等伙伴,分享了與毫末合作的最新進(jìn)展。英特爾中國(guó)研究院智能駕駛實(shí)驗(yàn)室總監(jiān)、首席研究員吳向斌出席演講。

(毫末智行合作伙伴出席HAOMO AI DAY)
王飛躍表示,“希望中科院自動(dòng)化所與毫末智行通力合作,能建立起毫末在自動(dòng)駕駛技術(shù)領(lǐng)域的技術(shù)體系和理論體系,讓全世界相關(guān)科研人員能共享毫末的成果。”
目前毫末與北京交通大學(xué)計(jì)算機(jī)與信息技術(shù)學(xué)院,就自動(dòng)標(biāo)注相關(guān)技術(shù)領(lǐng)域展開(kāi)了深入合作。趙耀表示,“期待未來(lái)與毫末一起,在人才培養(yǎng)、技術(shù)研發(fā)、行業(yè)標(biāo)準(zhǔn)制定方面加強(qiáng)合作,建立技術(shù)護(hù)城河,攜學(xué)界和企業(yè)之力共同將中國(guó)自動(dòng)駕駛做大做強(qiáng)。”
楊駿表示,感謝像毫末這樣非常優(yōu)秀的國(guó)內(nèi)無(wú)人車(chē)企業(yè),達(dá)達(dá)與毫末攜手進(jìn)行非常有價(jià)值的無(wú)人配送探索,為行業(yè)發(fā)展奠定良好基礎(chǔ)。
吳向斌表示,希望毫末智行抓住機(jī)遇,持續(xù)創(chuàng)新,開(kāi)放共贏,為中國(guó)特色智能網(wǎng)聯(lián)汽車(chē)貢獻(xiàn)力量。
此外,北京、深圳等地相關(guān)政府主管部門(mén)、專(zhuān)業(yè)機(jī)構(gòu)、協(xié)會(huì),阿里、美團(tuán)、騰訊、百度、京東、字節(jié)跳動(dòng)、四維圖新、高德、迪信通、寶馬、奔馳、現(xiàn)代、比亞迪、奇瑞、長(zhǎng)城、高通、英特爾、瑞薩、寒武紀(jì)、速騰聚創(chuàng)、毫末投資人等伙伴以線上或線下方式參與了本次活動(dòng)直播。
顧維灝在演講最后表示:“凡是經(jīng)歷,皆為饋贈(zèng)。毫末最為制勝的武器,是毫末同學(xué)們?cè)谝黄鸲纬傻挠y而上的創(chuàng)業(yè)精神,這種無(wú)敵的創(chuàng)業(yè)精神是我們面對(duì)挑戰(zhàn),取得領(lǐng)先,不斷向前的最大法寶。毫末希望攜手更多同路人,一起做更多有意義的事情。”張凱在演講最后全新發(fā)布毫末愿景:“讓機(jī)器智能移動(dòng),給生活更多美好。”這也是第七屆HAOMO AI DAY的主題。本屆HAOMO AI DAY所展現(xiàn)的信心及發(fā)布內(nèi)容,在嚴(yán)寒冬日里,以溫暖的力量,努力為行業(yè)照亮著火種。2023年伊始,毫末將向新的三年全力邁進(jìn)。

-
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14258瀏覽量
170088
發(fā)布評(píng)論請(qǐng)先 登錄
AI將如何改變自動(dòng)駕駛?
2024年自動(dòng)駕駛行業(yè)熱點(diǎn)技術(shù)盤(pán)點(diǎn)
一文聊聊自動(dòng)駕駛測(cè)試技術(shù)的挑戰(zhàn)與創(chuàng)新

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類(lèi)別分享

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類(lèi)別分享

MEMS技術(shù)在自動(dòng)駕駛汽車(chē)中的應(yīng)用
自動(dòng)駕駛汽車(chē)安全嗎?







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論