 PLC控制/監控機器人的抓手狀態的功能塊FB250
PLC控制/監控機器人的抓手狀態的功能塊FB250

選擇維護位置
采用“維護”(Maintenance) 按鈕(切換功能),可以選擇維護位置或對其進行確認。到達維護位置時,其文本將從“維護”變成“維護確認”。
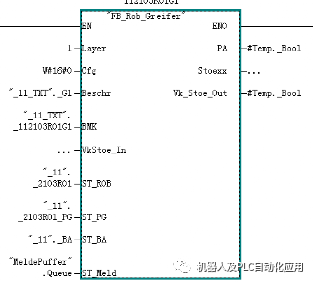
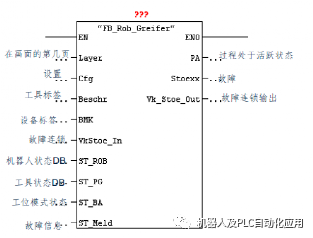
Beschr :工具標簽:


機器人反饋故障:
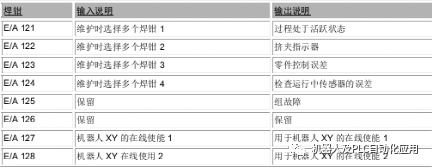
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夾爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件檢查錯誤
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索傳感器錯誤
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125總故障
注: 抓手的報警和別的工具不同,抓手的報警A122 ,A125,A121都是編輯在MAKRO342/MAKRO343里,零件檢測A123, A124需要在程序里編輯.
審核編輯:劉清
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2564文章
52609瀏覽量
763871 -
機器人
+關注
關注
213文章
29506瀏覽量
211621 -
PLC控制
+關注
關注
9文章
253瀏覽量
27833
原文標題:VASS :PLC-機器人抓手故障的編寫
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
什么是FB功能塊?為什么要使用FB功能塊?如何制作一個FB功能塊?
FB功能塊是一種封裝了特定邏輯功能的模塊。它類似于一個子程序或函數,但是它有自己的內部變量和接口。FB功能塊可以被多次調用,并且每次調用
研華推出專為批次控制設計的功能塊
研華近期推出專為批次控制設計的功能塊(Function Block,FB),讓客戶僅透過簡單的拉選動作,就可以輕松完成批次控制的設定。
發表于 09-20 09:17
?926次閱讀
控制KUKA安全機器人的PLC標準功能塊FB 292
責任編輯:xj 原文標題:控制KUKA安全機器人的PLC標準功能塊FB 292 文章出處:【微信公眾號:

西門子PLC系統功能塊和系統功能
的參考幫助中可找到進一步的信息。 系統功能塊 系統功能塊(SFB )是集成在S7 CPU中的功能塊。SFB 作為操作系統的一部分,不占用戶程序空間。與FB相同,SFB 也是“具有存儲器
調用功能塊(FB或SFB)
在功能塊調用時輸出賦值是不可能的。聲明的輸出參數的值存貯在實例數據中。在那它能夠被所有功能塊存取。要讀取輸出數據,必須在功能塊中定義存取。
功能塊(FB)的結構介紹
功能塊是邏輯塊,包含程序部分,并且有一個內存區域援引派給它。無論何時FB被調用,必須給它指定一個實例數據塊。當定義FB的聲明部分時,就說明了
基本的速度控制功能塊介紹
本節將介紹幾個基本的速度控制功能塊: MC_MoveVelocityMCA_JogAxisMCA_MoveVelocityContinuous 2_具體操作介紹 1.原程序在
發表于 03-08 14:41
?1175次閱讀






 工商網監
工商網監
評論