") PLC控制/監(jiān)控機器人抓手故障的編寫
PLC控制/監(jiān)控機器人抓手故障的編寫

PLC控制/監(jiān)控機器人的抓手狀態(tài)的功能塊FB250

選擇維護位置
采用“維護”(Maintenance) 按鈕(切換功能),可以選擇維護位置或對其進行確認。到達維護位置時,其文本將從“維護”變成“維護確認”。
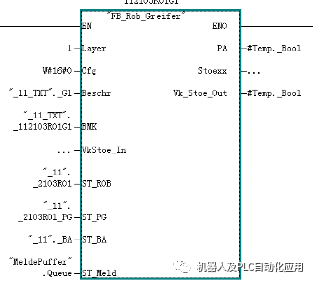
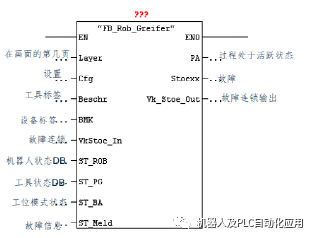
Beschr :工具標簽:


機器人反饋故障:
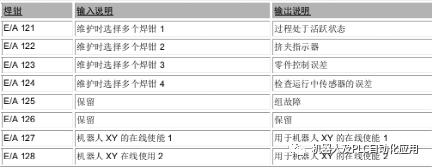
PA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=0));
A121激活工具
xFVA := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=1));
A122夾爪K91不到位故障
xFBTK := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=2));
A123零件檢查錯誤
xFSLS := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=3));
A124搜索傳感器錯誤
xFSST := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A121_128_Greifer,N:=4));
A125總故障
注: 抓手的報警和別的工具不同,抓手的報警A122 ,A125,A121都是編輯在MAKRO342/MAKRO343里,零件檢測A123, A124需要在程序里編輯.
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關注
關注
2565文章
52957瀏覽量
767083 -
機器人
+關注
關注
213文章
29719瀏覽量
212777 -
plc
+關注
關注
5036文章
13904瀏覽量
474372
原文標題:VASS :PLC-機器人抓手故障的編寫
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
熱點推薦
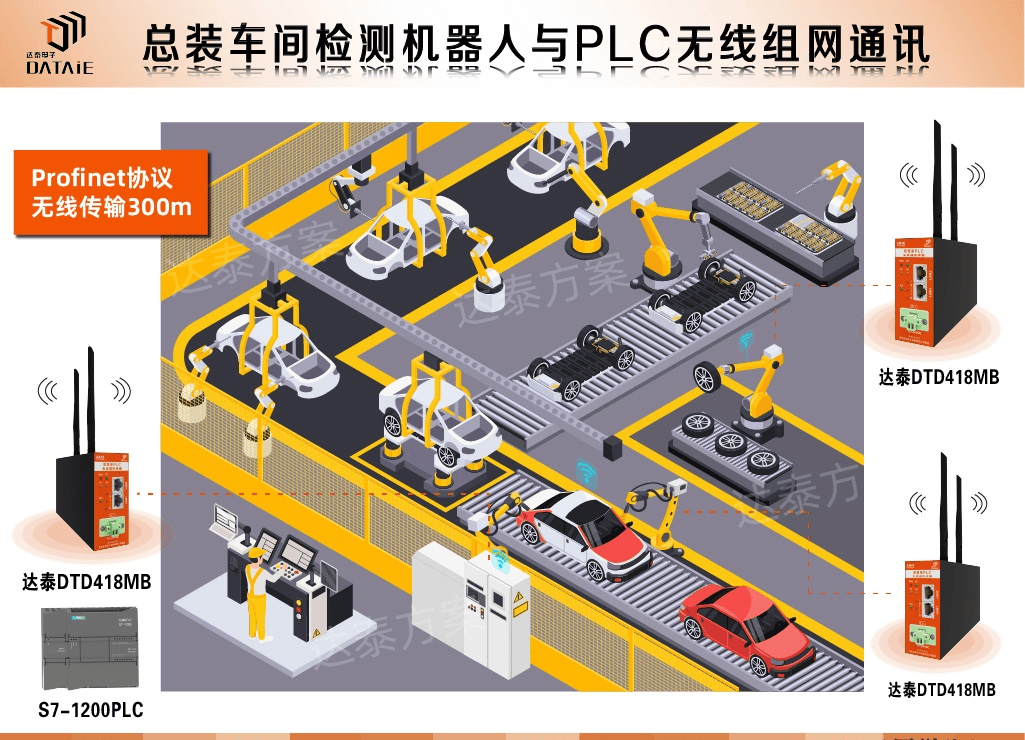
汽車制造車間檢測機器人與PLC無線以太網(wǎng)實時控制方案
。檢測機器人通過傳感器、視覺系統(tǒng)和軟件算法采集數(shù)據(jù)后,將信息傳輸?shù)骄偷?b class='flag-5'>PLC控制系統(tǒng)中,以實現(xiàn)人機交互、實時監(jiān)控、數(shù)據(jù)分析、工藝優(yōu)化以及生產流程閉環(huán)
當機器人遇上“語言障礙”:CCLINKIE轉Profinet的“破冰外掛”來啦\\!
NY-N831-CCLKIE網(wǎng)關的核心在于“雙向協(xié)議翻譯引擎”:
實時數(shù)據(jù)映射:內置200+工業(yè)協(xié)議接口模板,將三菱PLC的D寄存器數(shù)據(jù)(如X/Y軸坐標)自動映射到庫卡機器人的Move指令參數(shù),誤差控制
發(fā)表于 06-04 14:31
盤點#機器人開發(fā)平臺
地瓜機器人RDK X5開發(fā)套件地瓜機器人RDK X5開發(fā)套件產品介紹 旭日5芯片10TOPs算力-電子發(fā)燒友網(wǎng)機器人開發(fā)套件 Kria KR260機器人開發(fā)套件 Kria KR260-
發(fā)表于 05-13 15:02
詳細介紹機場智能指路機器人的工作原理
帶)定位、Wi - Fi 定位等。藍牙定位可以通過與機場內部署的藍牙信標進行通信,獲取機器人的大致位置信息。UWB 定位則利用超寬帶信號實現(xiàn)更精確的定位,能夠在復雜的室內環(huán)境中達到較高的定位精度,誤差可控制
發(fā)表于 05-10 18:26
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】機器人入門的引路書
ROS的全稱:Robot Operating System 機器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫,是通信總線,協(xié)調多個傳感器
為了解決機器人里各廠商模塊不通用的問題,讓機器人快速開發(fā)
發(fā)表于 04-30 01:05
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內容初識
講解了如何在 ROS 2 中實現(xiàn)機器人的運動控制,包括速度控制、位置控制等。通過編寫運動控制節(jié)點
發(fā)表于 04-27 11:24
庫卡KUKA機器人常見故障維修
; ⑤盤管灌溉不足; 2.維修期間KUKA機器人伺服電機過熱故障排除 ①降低電源電壓(例如,調整電源變壓器的抽頭); ②增加電源電壓或更換電源; ①修理鐵芯并排除故障; ①減載;按照規(guī)定時間檢查啟動; ⑤采用二次浸漬和真空浸漬工
ABB機器人與西門子PLC通訊案例
在現(xiàn)代工業(yè)自動化領域中,機器人與可編程邏輯控制器(PLC)之間的通訊是實現(xiàn)高效、精準生產線的關鍵。ABB機器人與西門子PLC作為行業(yè)內的佼佼
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎模塊
具身智能機器人的基礎模塊,這個是本書的第二部分內容,主要分為四個部分:機器人計算系統(tǒng),自主機器人的感知系統(tǒng),自主機器人的定位系統(tǒng),自主機器人
發(fā)表于 01-04 19:22
【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現(xiàn)出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大模型如何提升機器人的能力,大
發(fā)表于 12-29 23:04
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
在工業(yè)自動化領域,不同設備間的通訊和數(shù)據(jù)交換是系統(tǒng)穩(wěn)定運行的關鍵。其中,ABB機器人與PLC(可編程邏輯控制器)之間的協(xié)作尤為重要。為實現(xiàn)這一目標,我們常常需要通過特定的通訊協(xié)議進行數(shù)據(jù)的傳輸和指令
【「具身智能機器人系統(tǒng)」閱讀體驗】+初品的體驗
《具身智能機器人系統(tǒng)》 一書由甘一鳴、俞波、萬梓燊、劉少山老師共同編寫,其封面如圖1所示。
本書共由5部分組成,其結構和內容如圖2所示。
該書可作為高校和科研機構的教材,為學生和研究人員提供系統(tǒng)
發(fā)表于 12-20 19:17
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示,機器人的角色為迎賓機器人,開發(fā)板負責人賓客出現(xiàn)監(jiān)聽
發(fā)表于 12-02 14:55
焊接機器人常見故障及排查
的跡象。 檢查緊固件: 確保所有緊固件都已正確擰緊,沒有松動。 檢查過載保護: 如果機器人有過載保護,檢查是否因為過載而停止工作。 2. 電氣故障 故障現(xiàn)象: 機器人無法啟動、電機不工
FMEA在工業(yè)機器人故障預防中的應用
在工業(yè)自動化領域,F(xiàn)MEA(Failure Mode and Effects Analysis)不僅是一種分析方法,更是提升產品可靠性和安全性的關鍵工具。通過對工業(yè)機器人可能發(fā)生的各種故障模式進行





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論