 ABB機器人與西門子PLC通訊案例
ABB機器人與西門子PLC通訊案例
在現代工業自動化領域中,機器人與可編程邏輯控制器(PLC)之間的通訊是實現高效、精準生產線的關鍵。ABB機器人與西門子PLC作為行業內的佼佼者,其通訊技術的掌握對于提升生產效率、優化生產流程具有重要意義。本文將通過一個詳細的案例,解析ABB機器人與西門子PLC之間的通訊實現過程,涵蓋硬件準備、網絡配置、通訊設置、編程調試及故障排查等多個方面,為自動化生產線的構建與優化提供技術支持。
一、引言
隨著工業4.0時代的到來,智能制造已成為全球制造業的發展趨勢。在這一背景下,機器人與PLC之間的通訊技術顯得尤為重要。ABB機器人以其卓越的性能和靈活性,廣泛應用于各類生產線中;而西門子PLC則以其穩定可靠、功能強大的特點,成為自動化控制系統的核心。本文將以ABB IRB120系列機器人與西門子S7-1200系列PLC為例,詳細解析兩者之間的通訊實現過程。
二、硬件準備
ABB IRB120系列機器人:該機器人是ABB Robotics最新一代6軸工業機器人中的一員,有效載荷達3kg,專為使用基于機器人的柔性自動化的制造行業(例如3C行業)而設計。機器人控制器為IRC5 Compact(簡稱IRC5C)。
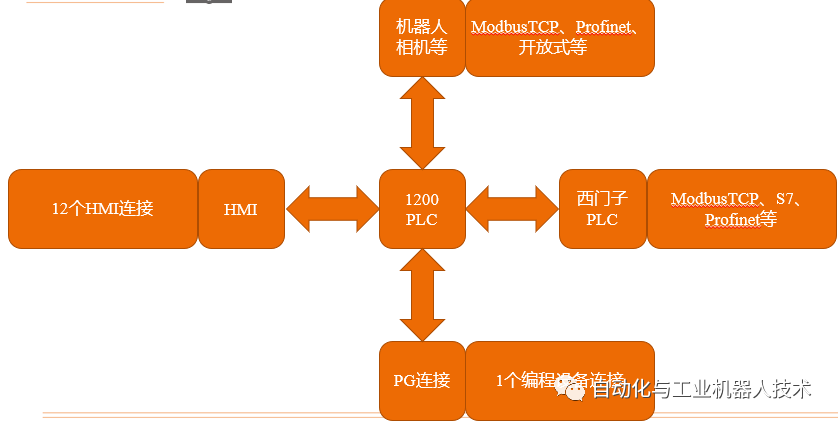
西門子S7-1200系列PLC:該PLC使用靈活、功能強大,可用于控制各種各樣的設備以滿足自動化需求。S7-1200設計緊湊、組態靈活且具有功能強大的指令集,其中CPU將微處理器、集成電源、輸入和輸出電路、內置PROFINET、高速運動控制I/O以及板載模擬量輸入組合到一個設計緊湊的外殼中來形成功能強大的控制器。
通訊設備:包括工業以太網交換機、網線等,用于構建PROFINET通訊網絡。
編程與調試設備:包括裝有TIA Portal軟件的編程電腦,用于PLC程序的編寫、下載和調試;以及ABB RobotStudio軟件,用于機器人的編程、調試和虛擬仿真。
三、網絡配置
PLC網絡配置:
在TIA Portal軟件中,選擇設備與網絡,添加新設備,選擇控制器型號為西門子S7-1200系列中的1214CDC/DC/DC。
設置PLC的IP地址,例如192.168.0.1,確保PLC與編程電腦在同一子網內。
配置PROFINET接口,用于與機器人、編程電腦等設備進行通訊。
機器人網絡配置:
在ABB RobotStudio軟件中,連接到機器人控制器IRC5C。
設置機器人的IP地址,例如192.168.0.2,確保機器人與PLC在同一子網內。
配置機器人的PROFINET通訊接口,用于與PLC進行通訊。
構建PROFINET網絡:
使用工業以太網交換機和網線,將PLC、機器人以及編程電腦連接到同一PROFINET網絡中。
確保網絡連接穩定,無丟包、延遲等問題。
四、通訊設置
導入GSD文件:
在TIA Portal軟件的PLC硬件組態中,導入ABB機器人的GSD文件(Generic Station Description File,通用站點描述文件)。該文件用于描述機器人的PROFINET通訊參數和配置。
配置I/O模塊:
在PLC硬件組態中,添加I/O模塊,用于與機器人進行通訊。默認配置中不分配實際地址,待配置完成后,系統會自動分配地址。
選擇DI(數字輸入)和DO(數字輸出)模塊,配置輸入和輸出通訊數量為128個字節(或根據實際需求調整)。
分配PROFINET名稱和IP地址:
在PLC端,為機器人分配PROFINET名稱和IP地址,確保與機器人端配置一致。
在機器人端,同樣設置PROFINET名稱和IP地址,與PLC端保持一致。
設置通訊參數:
在PLC和機器人端,分別設置通訊參數,如通訊速率、數據長度、超時時間等。
確保兩端參數一致,以保證通訊的穩定性和可靠性。
五、編程與調試
在TIA Portal軟件中,編寫PLC程序,實現與機器人的通訊控制。
使用GET/PUT指令,從機器人讀取數據或向機器人寫入數據。
配置程序塊,如OB(組織塊)、FC(功能塊)等,用于實現具體的控制邏輯。
機器人編程:
在ABB RobotStudio軟件中,編寫機器人程序,實現與PLC的通訊響應。
配置機器人的運動軌跡、速度、加速度等參數,以滿足生產需求。
使用RAPID語言或RobotStudio中的圖形化編程界面,編寫控制邏輯和通訊代碼。
下載與調試:
將PLC程序下載到PLC中,將機器人程序下載到機器人控制器中。
在TIA Portal和ABB RobotStudio軟件的在線模式下,監控PLC和機器人的運行狀態。
使用調試工具,檢查通訊數據的發送和接收情況,確保通訊正常。
根據調試結果,調整程序參數和配置,優化通訊性能。
六、通訊測試與驗證
功能測試:
通過PLC向機器人發送啟動、停止等控制信號,驗證機器人是否能夠正確響應。
通過機器人向PLC發送狀態信息(如故障報警、運行狀態等),驗證PLC是否能夠正確接收并處理這些信息。
性能測試:
在長時間運行的情況下,監測PLC和機器人之間的通訊狀態。
檢查通訊是否出現中斷、延遲或數據錯誤等問題。
根據測試結果,調整網絡配置和通訊參數,以提高通訊的穩定性和可靠性。
兼容性測試:
測試不同版本的PLC和機器人之間的通訊兼容性。
確保在升級或替換設備時,通訊系統能夠無縫對接,不影響生產線的正常運行。
七、故障排查與解決方案
通訊故障排查:
當出現通訊故障時,首先檢查網絡連接是否正常。
檢查PLC和機器人的IP地址、PROFINET名稱等配置是否正確。
使用網絡診斷工具,檢查網絡是否存在丟包、延遲等問題。
程序錯誤排查:
檢查PLC和機器人程序中的通訊代碼是否正確。
檢查程序中的變量名、地址等配置是否與實際情況一致。
使用調試工具,逐步排查程序中的錯誤。
硬件故障排查:
檢查PLC和機器人的通訊接口是否損壞。
檢查網線、交換機等通訊設備是否正常工作。
根據排查結果,更換損壞的硬件或修復故障設備。
解決方案:
根據排查結果,調整網絡配置、修改通訊程序或更新設備固件。
在解決故障后,重新進行通訊測試,確保通訊正常。
建立故障排查和解決方案的文檔記錄,以便后續參考和優化。
八、總結與展望
通過本文的詳細解析,我們了解了ABB機器人與西門子PLC之間通訊的實現過程和技術要點。從硬件準備、網絡配置、通訊設置、編程調試到故障排查與解決方案,每一步都至關重要。通過合理的網絡配置和編程設計,我們可以實現機器人與PLC之間高效、可靠的通訊,為自動化生產線的構建與優化提供有力支持。
未來,隨著智能制造和工業4.0的深入發展,機器人與PLC之間的通訊技術將更加復雜和多樣化。因此,我們需要不斷學習和掌握新的通訊技術和協議,以適應不斷變化的市場需求和技術挑戰。同時,我們也需要關注機器人和PLC的國產化進程,推動國內相關產業的發展和壯大。通過技術創新和產業升級,我們可以為工業自動化領域提供更加高效、可靠和智能的解決方案。
-
機器人
+關注
關注
213文章
29533瀏覽量
211721 -
plc
+關注
關注
5031文章
13781瀏覽量
472477 -
西門子
+關注
關注
98文章
3137瀏覽量
117813 -
工業自動化
+關注
關注
17文章
2678瀏覽量
68131
發布評論請先 登錄
雅馬哈機器人配置方法之西門子S7-1500控制技巧分享
ABB工業機器人與西門子S-1200 PLC通信的實現
西門子plc數據類型_西門子plc通訊方式
西門子S7-1500系列PLC控制的6軸機器人系統解析


西門子1200PLC之間的ModbusTCP通訊如何實現?
ABB機器人與西門子PLC的Profinet通訊設置
西門子PLC與IO模塊如何通訊
西門子PLC與ABB變頻器通訊怎么實現
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例






 工商網監
工商網監
評論