 開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例
開疆智能Profient轉ModbusTCP網關連接ABB機器人MODBUS TCP通訊案例

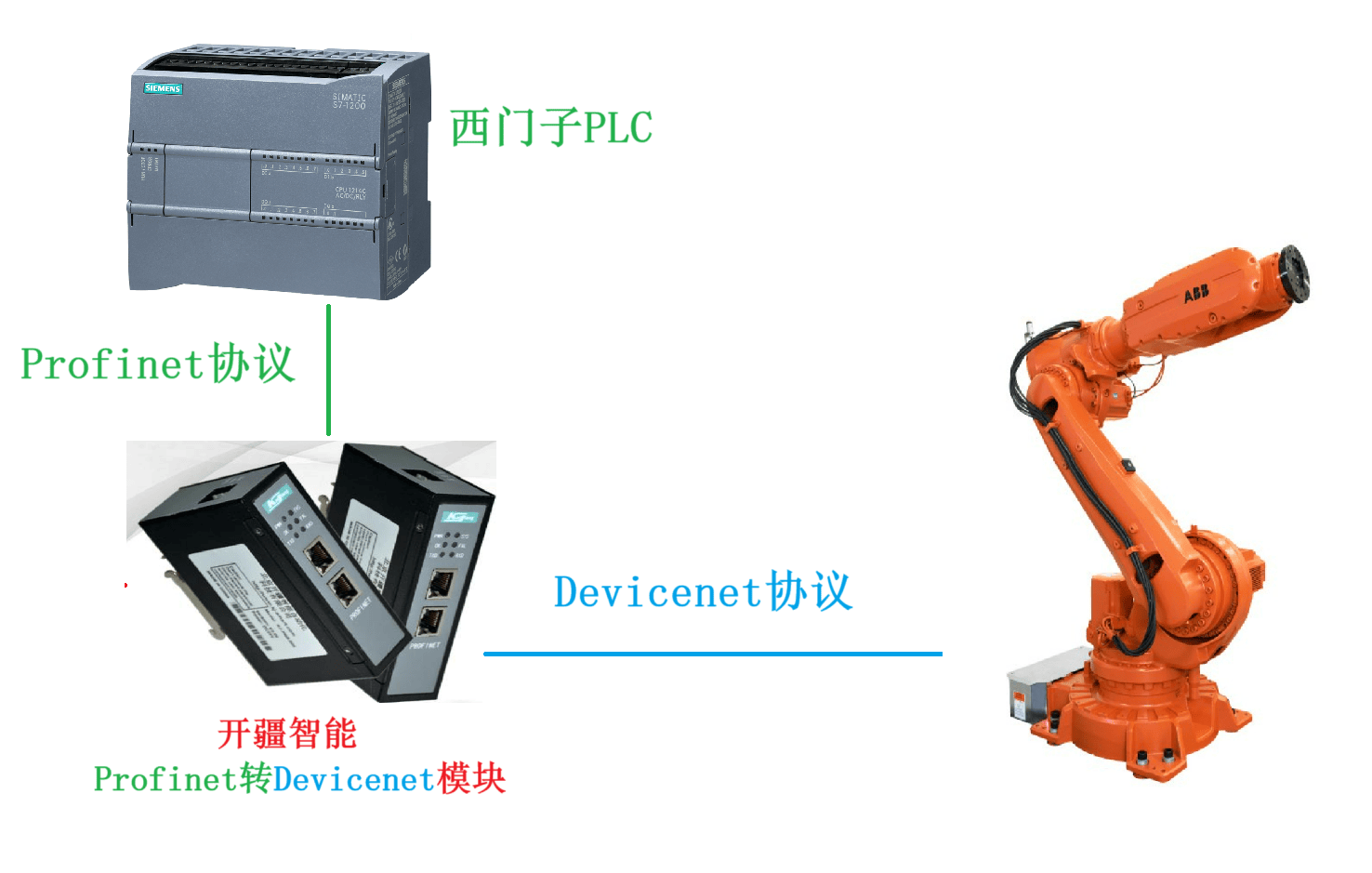
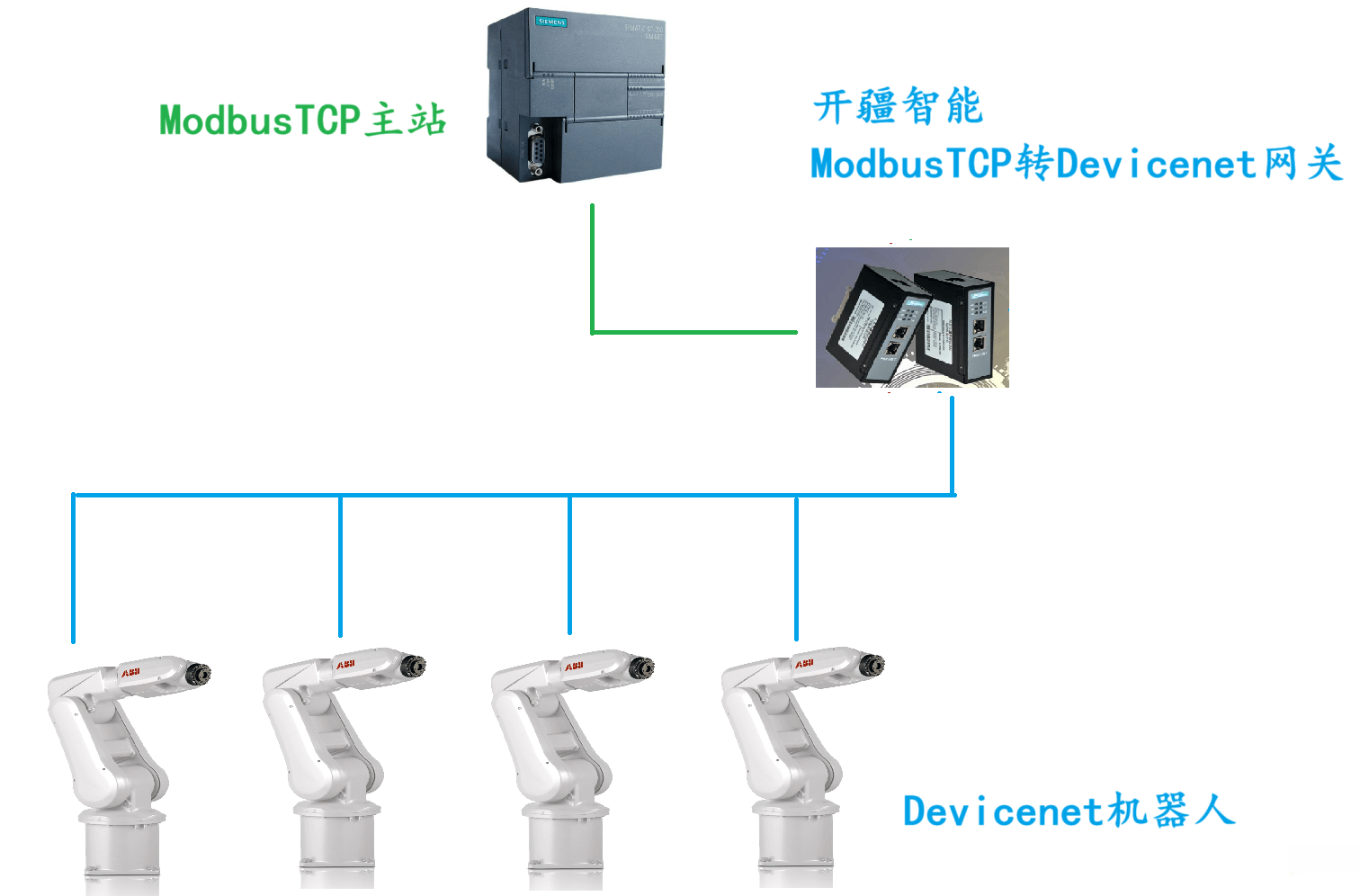
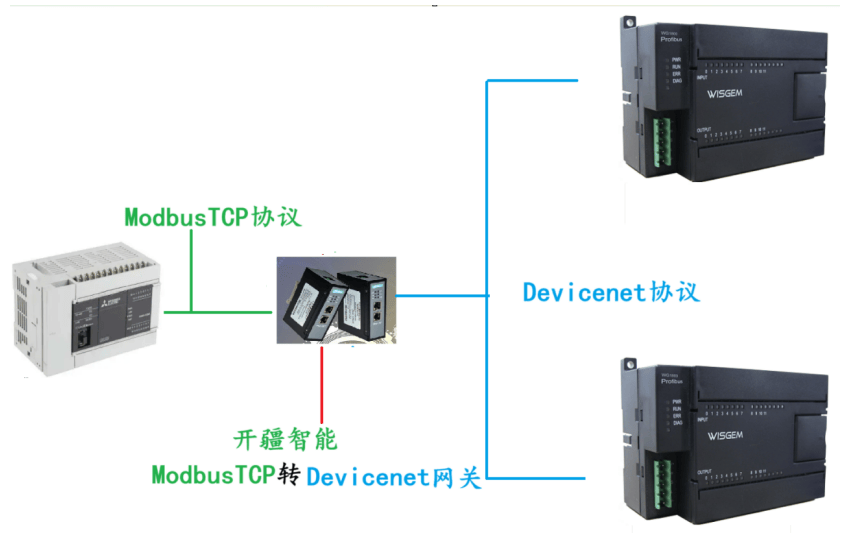
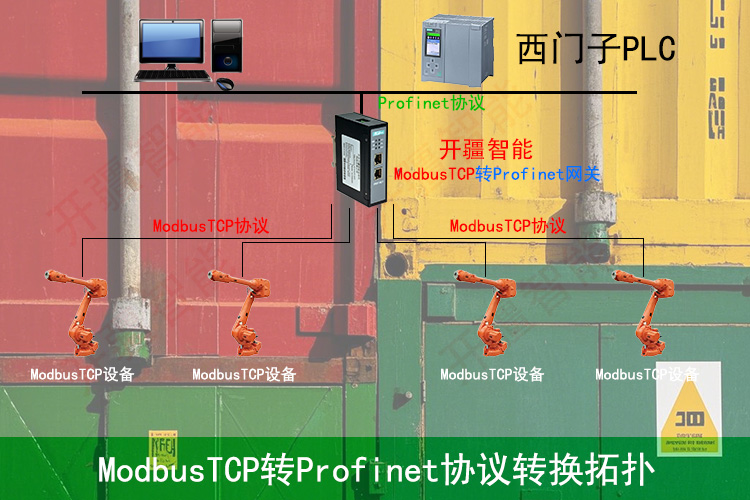
本案例是通過開疆智能Profinet轉ModbusTCP網關將西門子PLC與ABB機器人進行通訊
因西門子PLC采用Profinet協議,而ABB機器人采用的是ModbusTCP通訊。故采取此種方案。
配置過程:
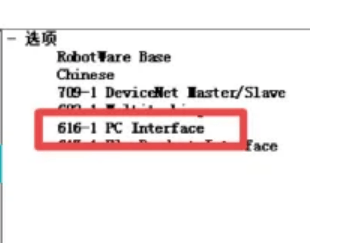
1.MODBUS/TCP基于以太網,故ABB機器人在使用時需要有616-1PCINTERFACE選項。(在機器人主菜單中,選擇“系統信息”查看選項)

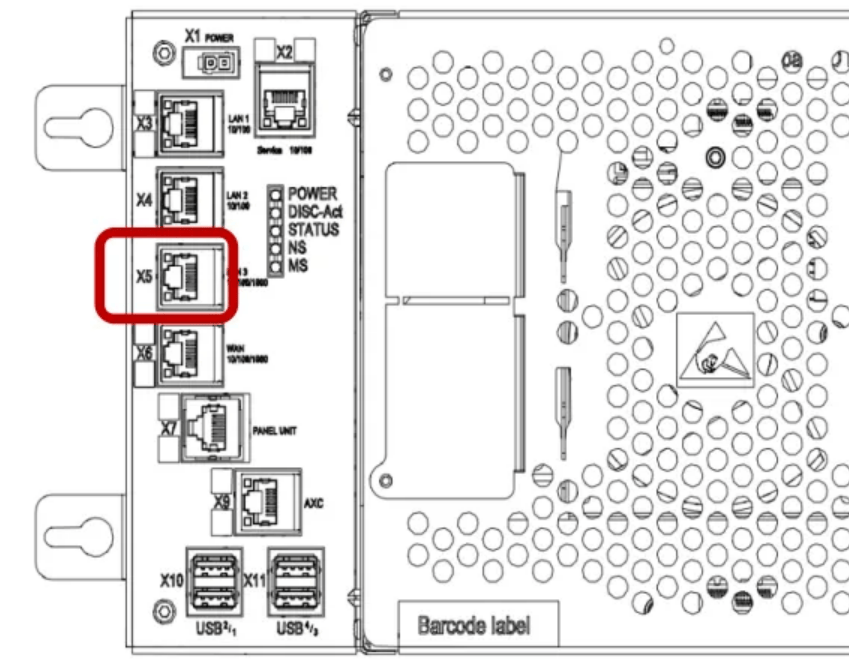
2.MODBUS/TCP通訊介質使用網線即可,但是網線連接的是機器人控制器的“X5”網口中。
案例:
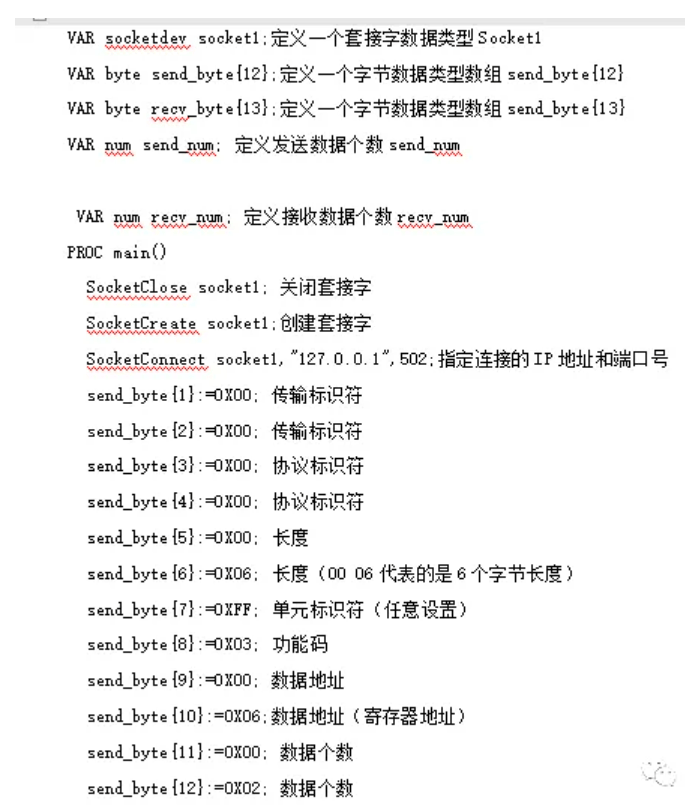
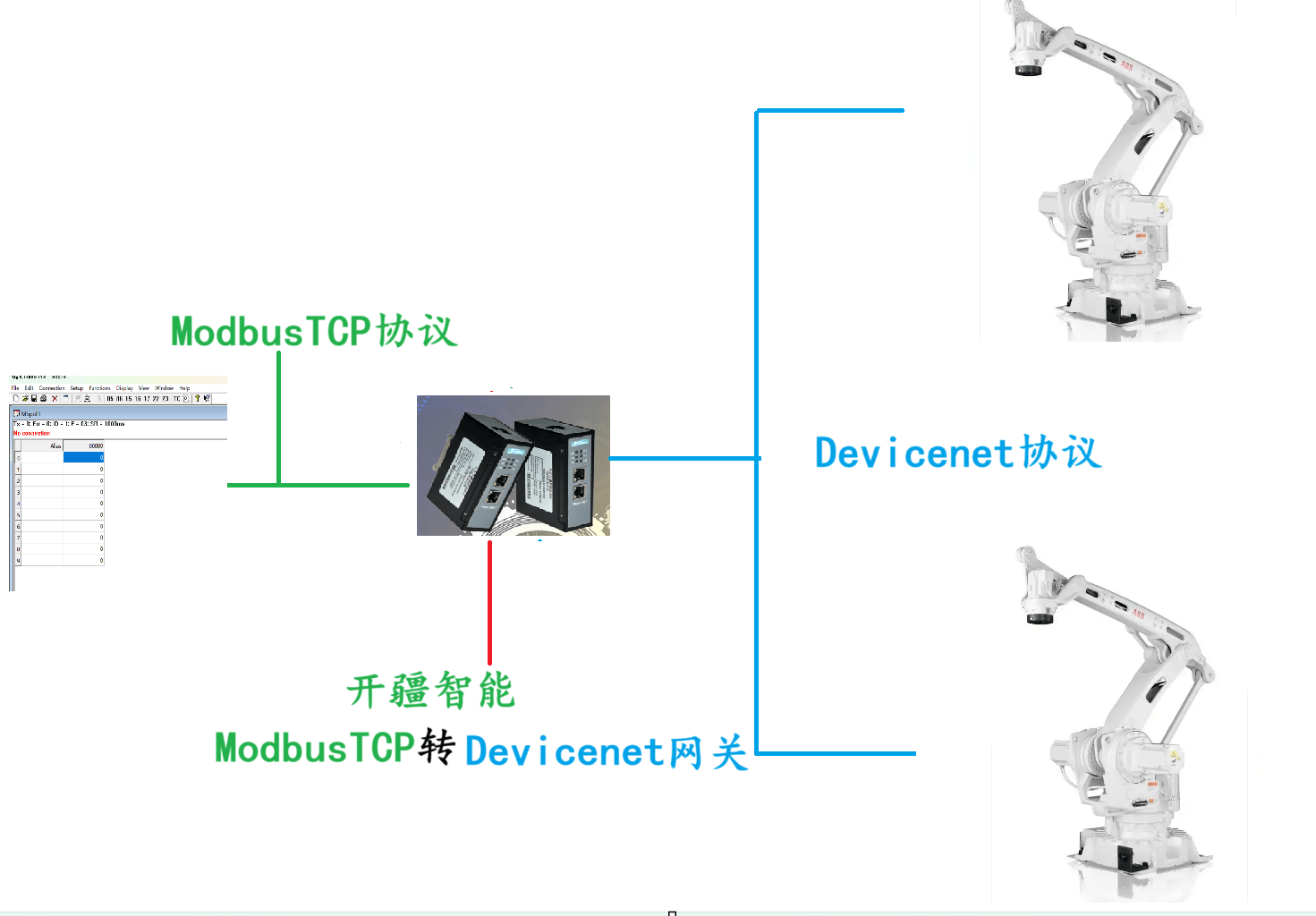
1. ABB機器人現在要讀取調試工具中的保持寄存器的值,從第6字節開始讀取2個字,使用的功能碼為0X03。
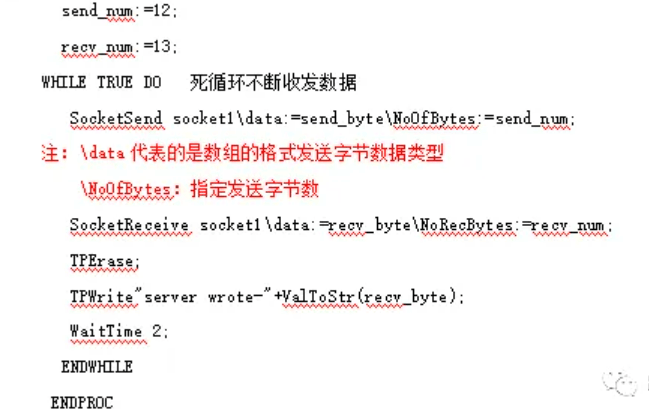
2. 2.讀取到了數據在機器人的示教器上顯示
3.機器人作為客戶端,Profinet轉ModbusTCP網關為服務器(Profinet一側網關永遠做服務器)
首先進行機器人端程序編寫:
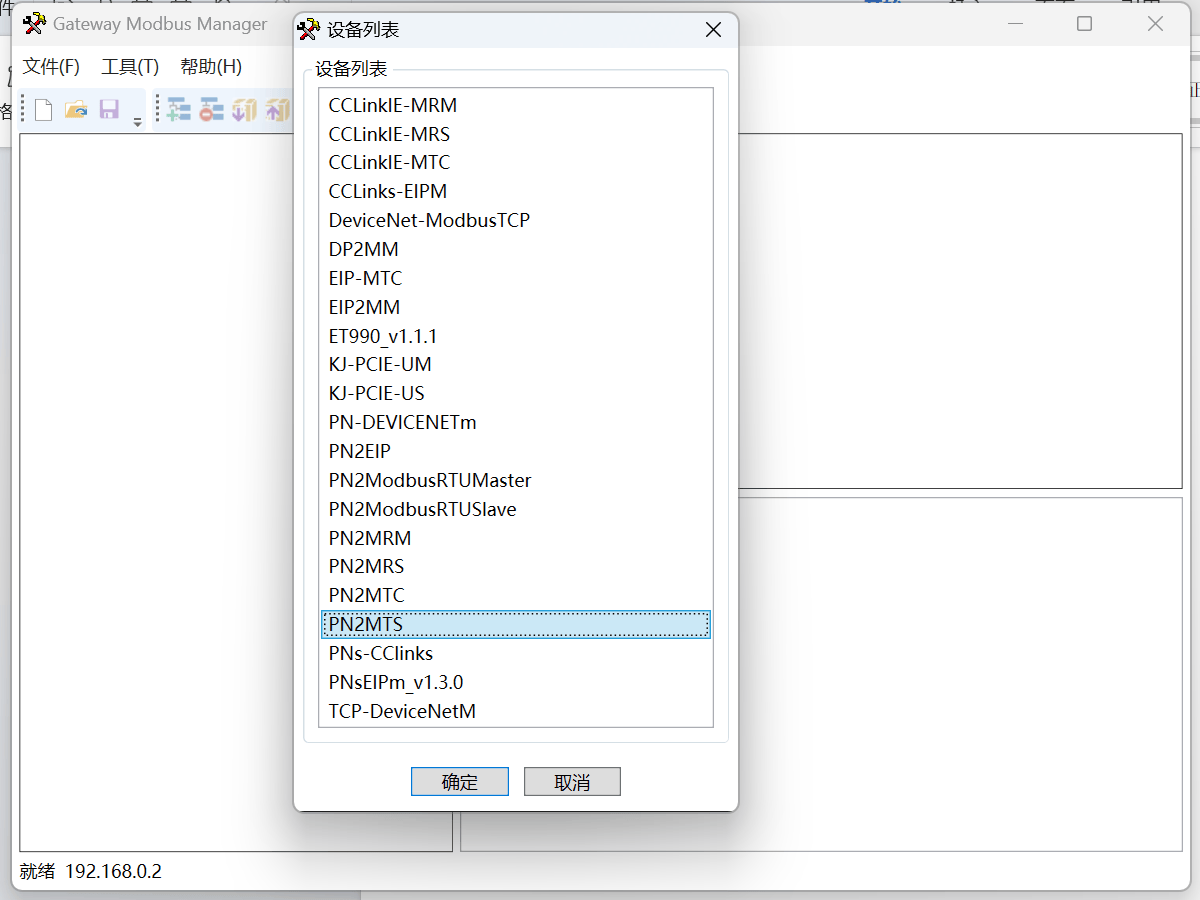
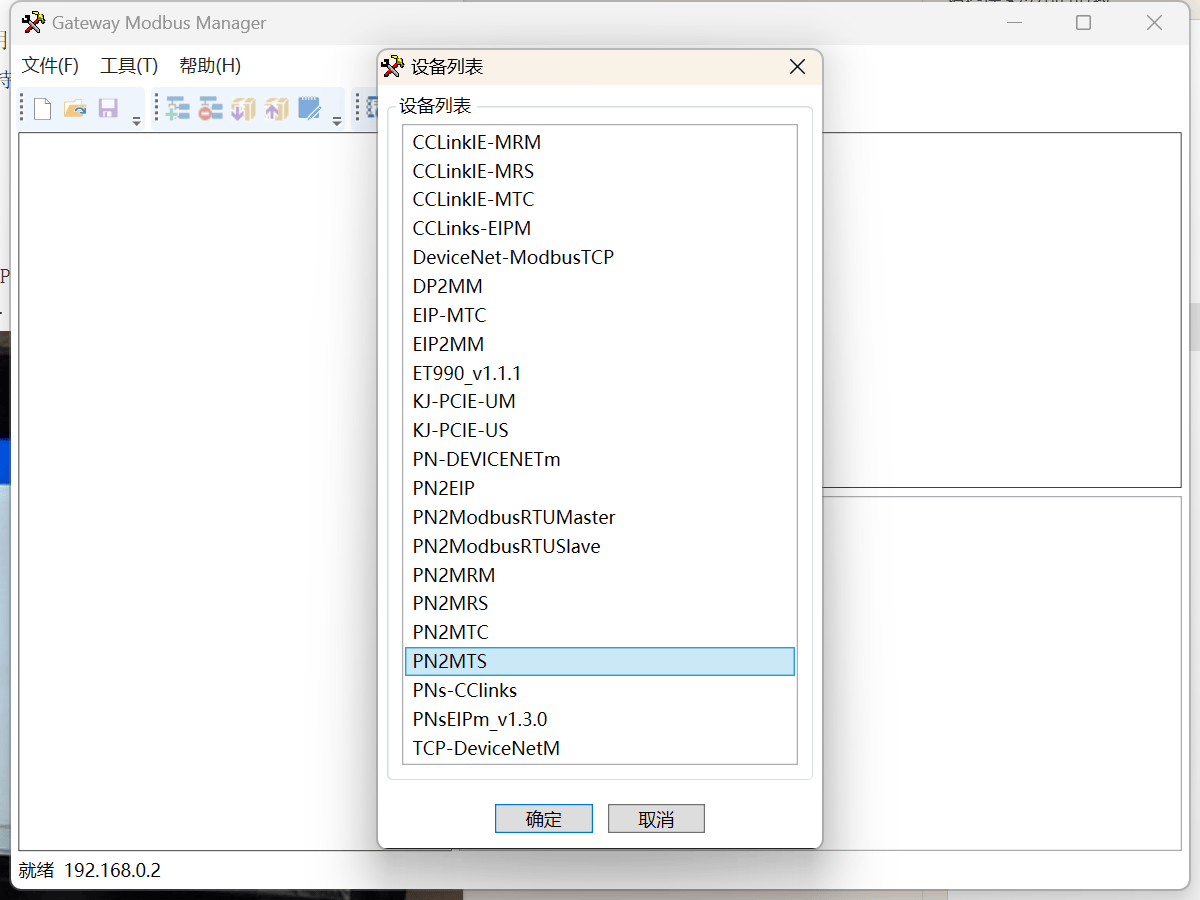
機器人配置完成后,打開網關配置軟件“Gateway Configuration Studio”(從網關供應商處獲取)

新建項目選擇PN2MTS(網關作為ModbusTCP從站),并分配Profinet與ModbusTCP兩側的IP地址
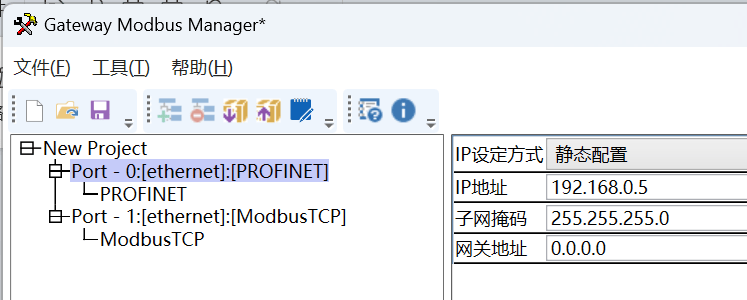
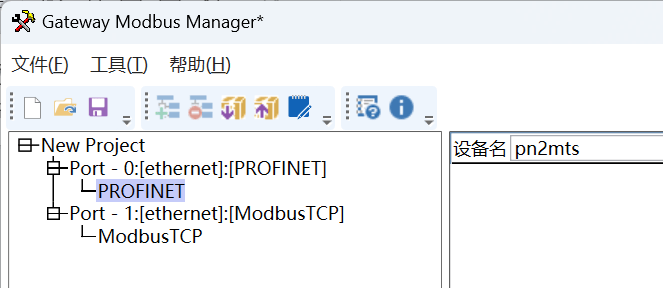
首先分配網關在Profinet一側的設備名稱及IP地址(與ModbusTCP可不在同一網段)
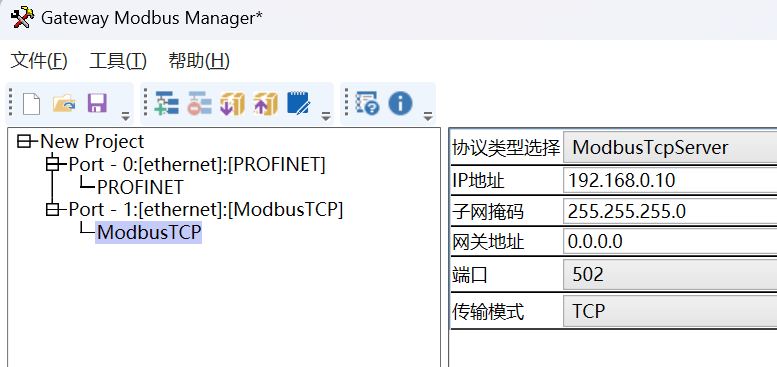
設置網關的ModbusTCP一側的IP地址,并將ip地址寫入abb機器人編程
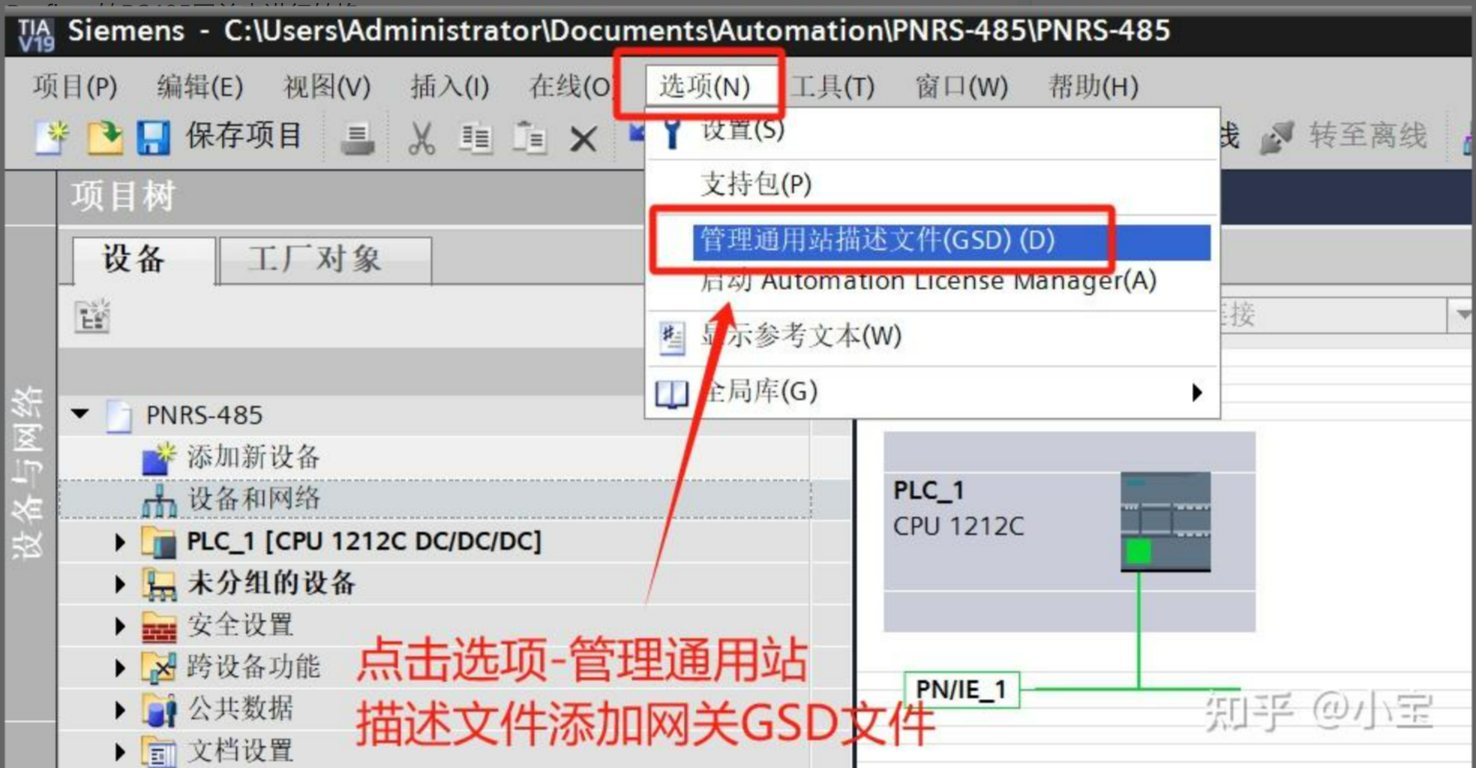
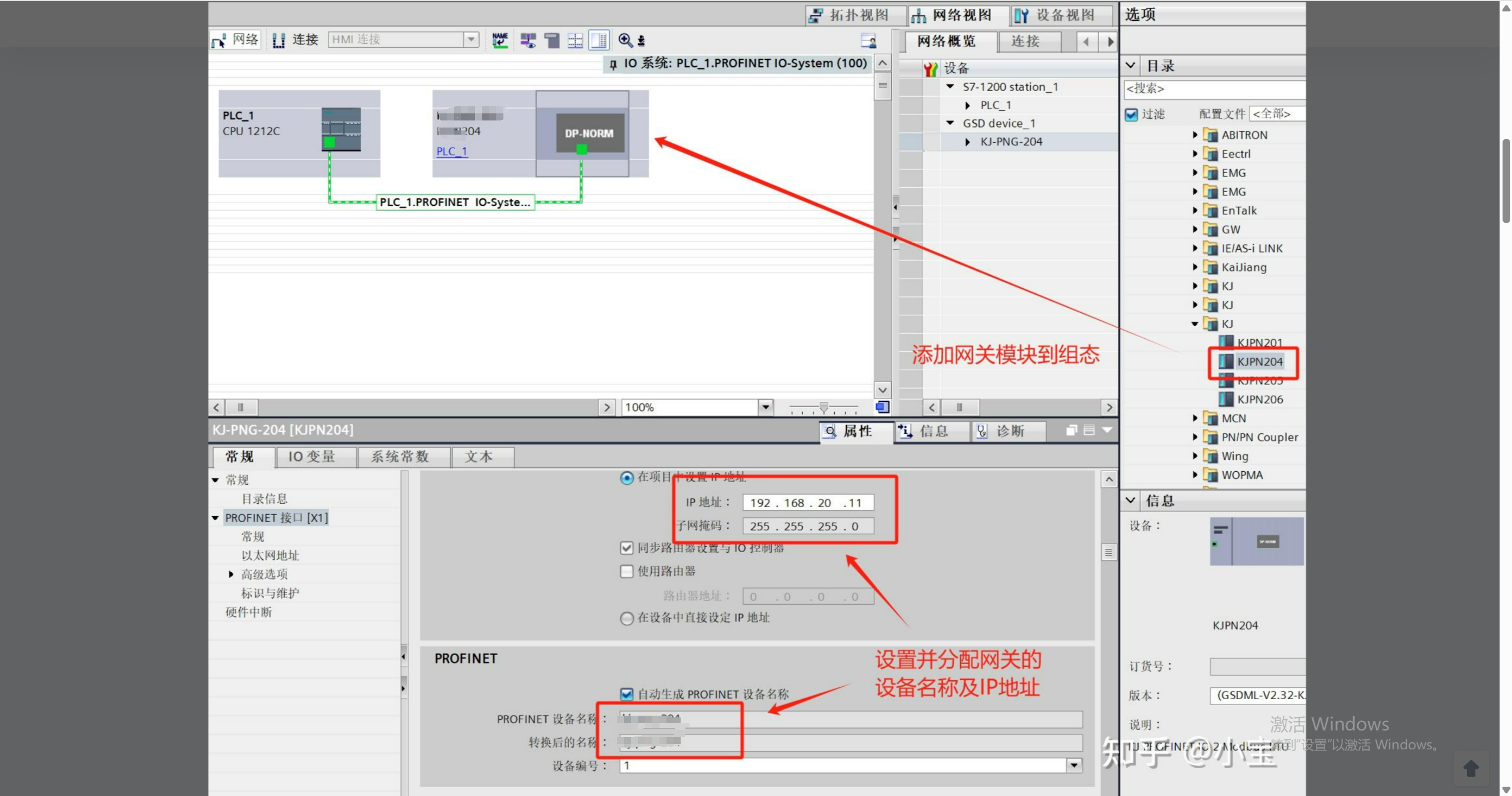
配置完成后下載配置到網關。將網關GSD文件導入西門子PLC配置軟件后,配置好同樣的設備名稱及IP以及分配好輸入輸出數據長度之后,觀察網關指示燈,當PWR,SYS,OK燈常亮,TXD及RXD交替閃爍,說明網關已經正常通訊,ABB機器人開始讀寫網關從西門子PLC收到的數據。
審核編輯 黃宇
-
機器人
+關注
關注
213文章
29691瀏覽量
212582 -
網關
+關注
關注
9文章
5623瀏覽量
52876 -
Profinet
+關注
關注
6文章
1676瀏覽量
25344 -
ModbusTCP
+關注
關注
0文章
215瀏覽量
4893
發布評論請先 登錄
開疆智能Profinet轉Devicenet網關連接ABB機器人配置案例
開疆智能ModbusTCP轉Devicenet網關連接FANUC機器人配置案例

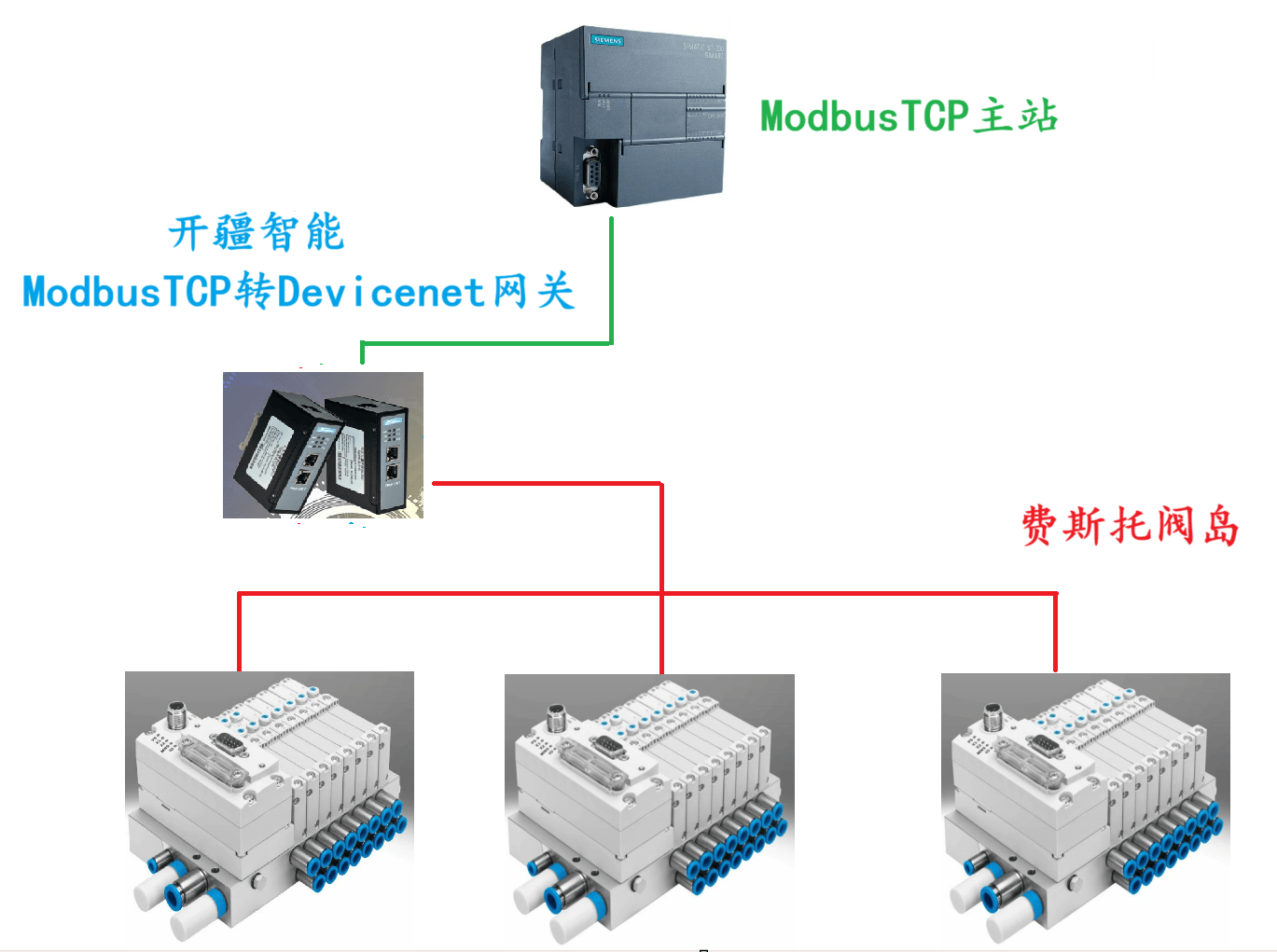
開疆智能Devicenet轉ModbusTCP網關連接費斯托閥島配置案例
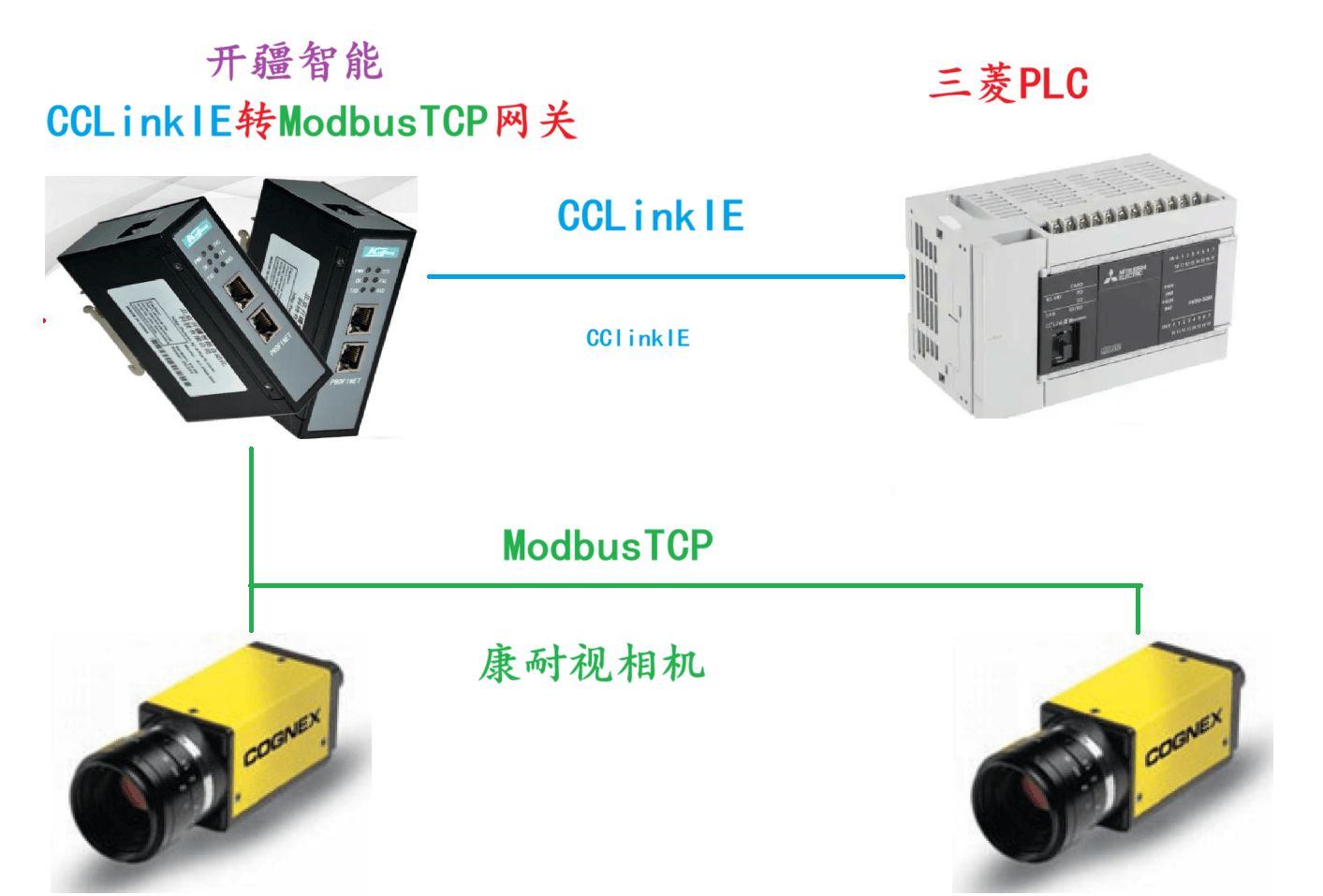
開疆智能CCLinkIE轉ModbusTCP網關連接康耐視InSight相機案例
開疆智能CCLinkIE轉ModbusTCP網關連接傲博機器人配置案例
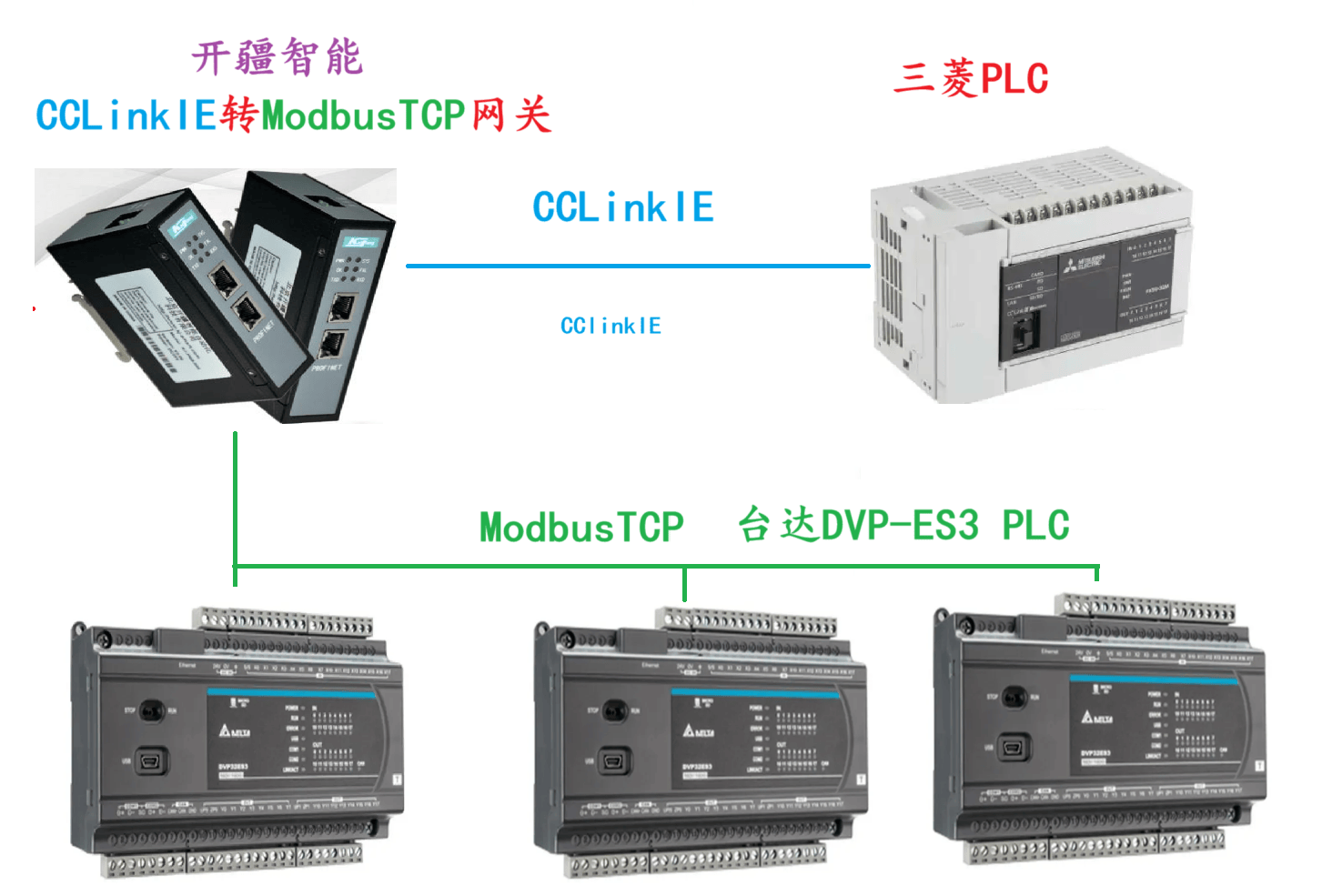
開疆智能ModbusTCP轉CClinkIE網關連接臺達DVP-ES3 PLC配置案例
開疆智能ModbusTCP轉Devicenet網關連接三菱PLC與ABB機器人配置案例

開疆智能ModbusTCP轉Devicenet網關連接ABB機器人配置案例
開疆智能Profinet轉ModbusTCP網關連接WINCC配置案例
開疆智能Profient轉DeviceNET主網關連接發那科機器人配置案例
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
ModbusTCP轉Profinet:ABB機器人與PLC的高效連接
開疆智能Profinet轉EthernetIP從網關連接ABB機器人做EtherNet主配置案例





 工商網監
工商網監
評論