") 噪聲對(duì)理想的PID控制器又有什么影響呢?
噪聲對(duì)理想的PID控制器又有什么影響呢?
1 先說噪聲
在電子設(shè)備等電路系統(tǒng)中,噪聲是不被系統(tǒng)需要的電信號(hào);電子設(shè)備產(chǎn)生的噪聲會(huì)由于多種不同的影響而產(chǎn)生很大的差異。在通信系統(tǒng)中,噪聲是一個(gè)錯(cuò)誤或不希望出現(xiàn)的隨機(jī)干擾從而作用于有效的信號(hào)。
2 噪聲對(duì)于系統(tǒng)的影響
噪聲出現(xiàn)的第一個(gè)場(chǎng)景,當(dāng)我們?cè)诮淌依镒鲇⒄Z(yǔ)聽力,然后旁邊的同學(xué)手機(jī)忽然來了一條短信,這時(shí)候往往可以聽到放英語(yǔ)聽力的喇叭會(huì)被干擾,然后會(huì)發(fā)出嗶嗶嗶的聲音;
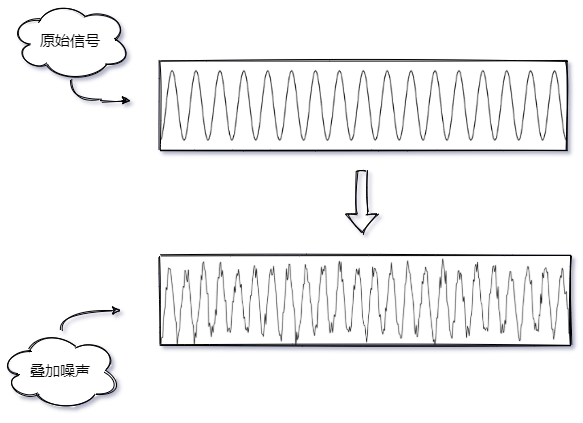
下面是一個(gè)正弦信號(hào)跌加噪聲的例子,在原始信號(hào)上疊加一定幅度的高斯噪聲,可以看到信號(hào)不再像原來的正弦信號(hào)那樣完美,具體如下圖所示;
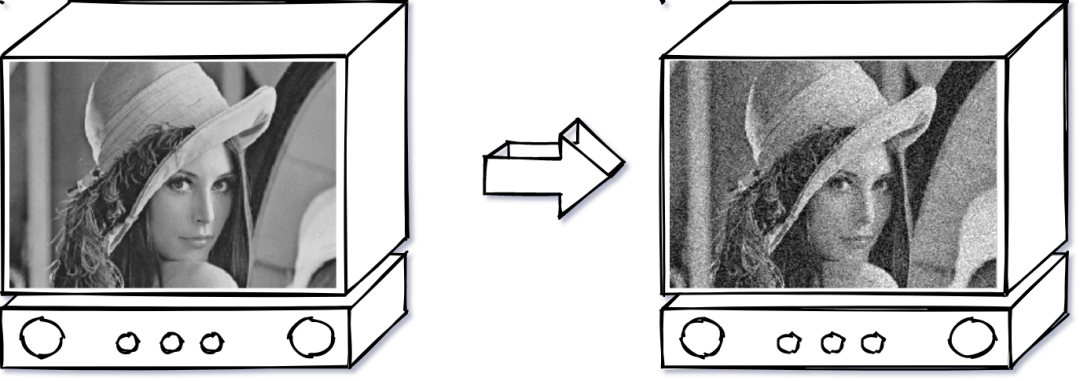
或者,很久很久以前,數(shù)字電視還沒有普及,那時(shí)候的顯像管的黑白電視,也容易出現(xiàn)這樣的雪花一樣的噪聲,疊加在圖片上就會(huì)出現(xiàn)這樣的效果,具體如下圖所示;
從上述的例子中可以看到,噪聲往往會(huì)對(duì)系統(tǒng)造成一定程度的影響,但是如果噪聲的幅度減小到一定程度,對(duì)于系統(tǒng)的影響可能就沒有那么容易被發(fā)現(xiàn)。
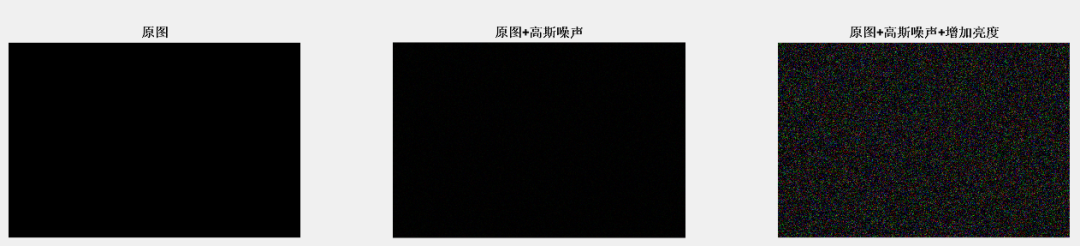
下面做一個(gè)實(shí)驗(yàn);在一張黑色圖片上疊加幅度很小幅度的高斯噪聲;從第二張圖片中發(fā)現(xiàn)噪聲沒有影響到整體圖片;
然后我嘗試提高了整幅圖片的亮度,發(fā)現(xiàn),噪點(diǎn)便開始出來了,這像極平時(shí)那些槍版影片的馬賽克畫質(zhì);整體的實(shí)驗(yàn)結(jié)果如下圖所示;
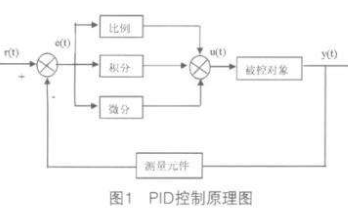
既然噪聲的幅度減小到一定程度,對(duì)于系統(tǒng)的影響可能就沒有那么容易被發(fā)現(xiàn),那么對(duì)理想的PID控制器又有什么影響呢?
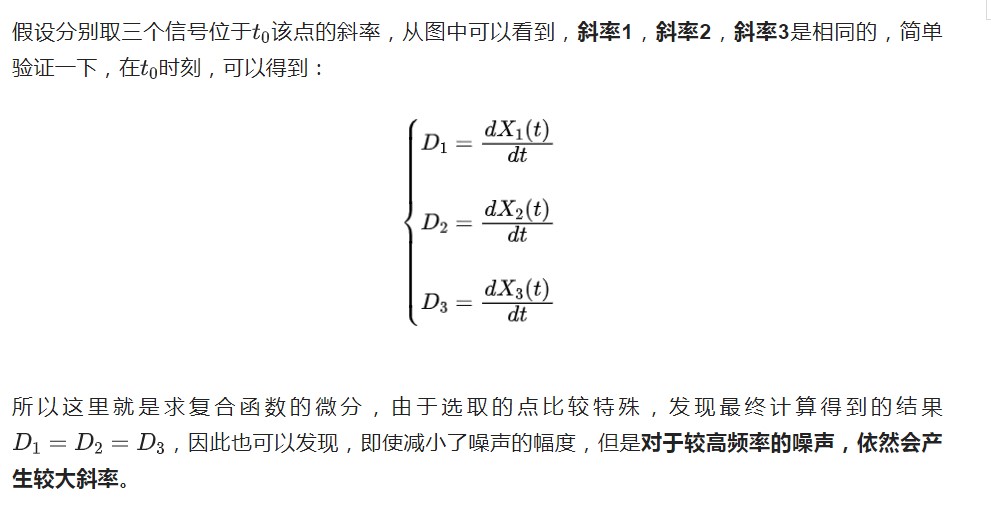
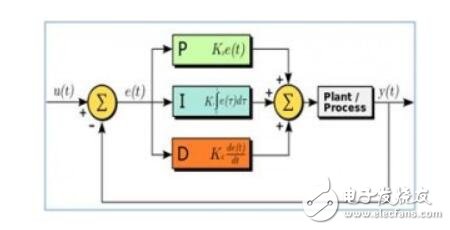
不要忘了,在理想PID控制器中,微分控制器會(huì)對(duì)偏差的變化率(斜率)進(jìn)行累加,從而產(chǎn)生積分器的輸出;
對(duì)于微分器來說,即使噪聲幅度足夠小,但是只要達(dá)到足夠高頻率,偏差的變化率一樣可以變得很大,下面舉個(gè)例子;
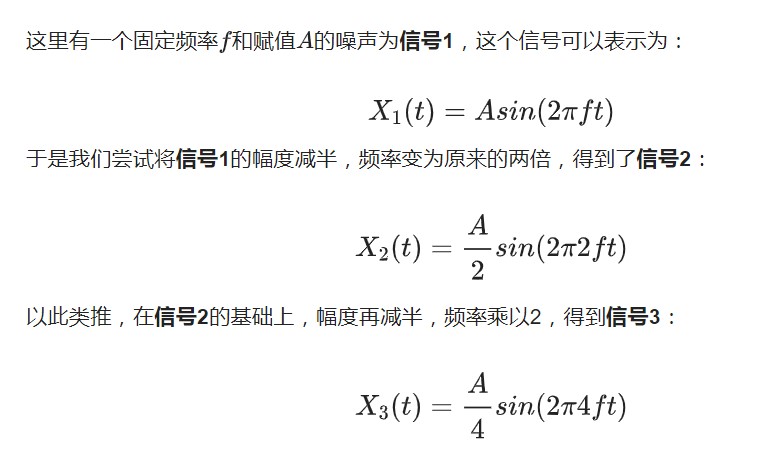
簡(jiǎn)單畫了一下這個(gè)信號(hào),具體如下圖所示;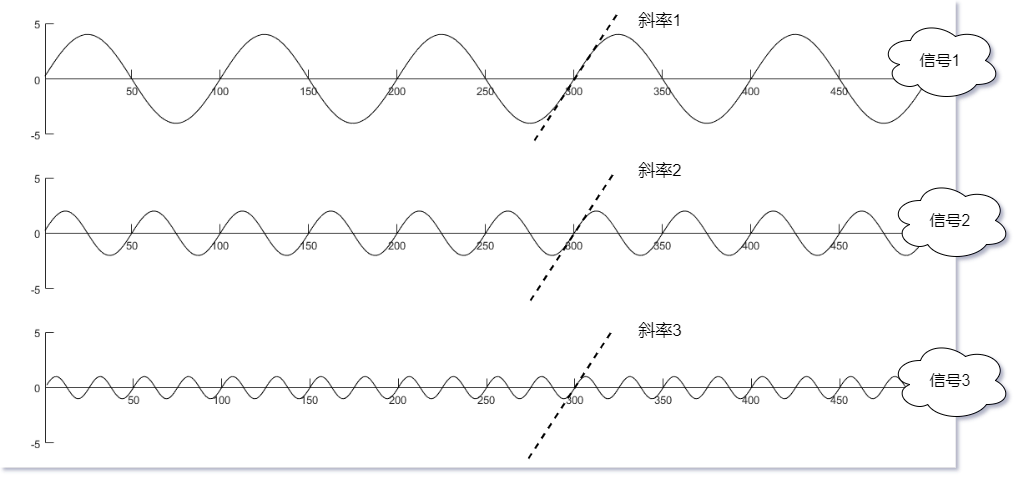
遇到高頻噪聲,那么微分器會(huì)產(chǎn)生較大的輸出,從而最終對(duì)系統(tǒng)造成影響,這是我們不希望出現(xiàn)的結(jié)果,因此在反饋回路中并不希望高頻噪聲進(jìn)入PID控制器的計(jì)算,這里就需要低通濾波器將噪聲濾除。
4 加入濾波器
低通濾波器可以濾除高頻信號(hào),這樣保留了有效信號(hào),可以設(shè)置所需的截止頻率;系統(tǒng)處理有效信號(hào),由于低頻部分信噪比較高,因此噪聲對(duì)于系統(tǒng)的影響較小,而高頻部分,信噪比就很低,這時(shí)候?qū)τ谙到y(tǒng)來說,噪聲就會(huì)造成不小的影響,具體如下圖所示;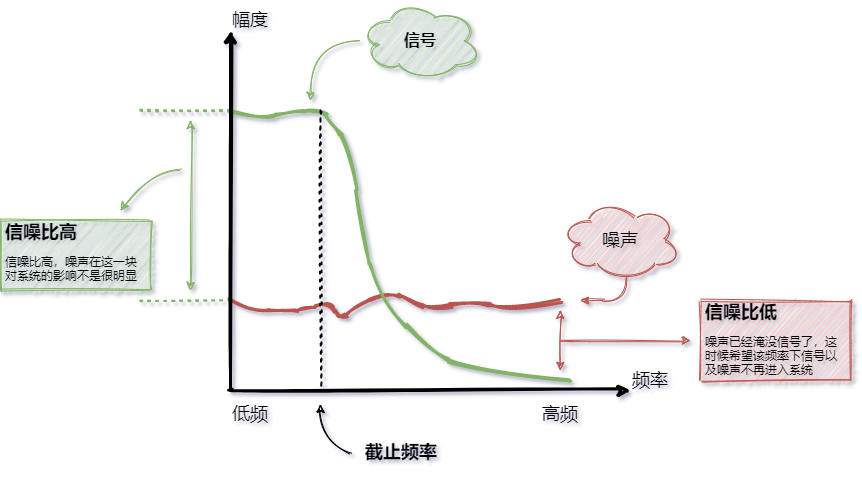
信噪比:有效信號(hào)和噪聲的比值,英文名稱叫做SNR或S/N(SIGNAL-NOISE RATIO);
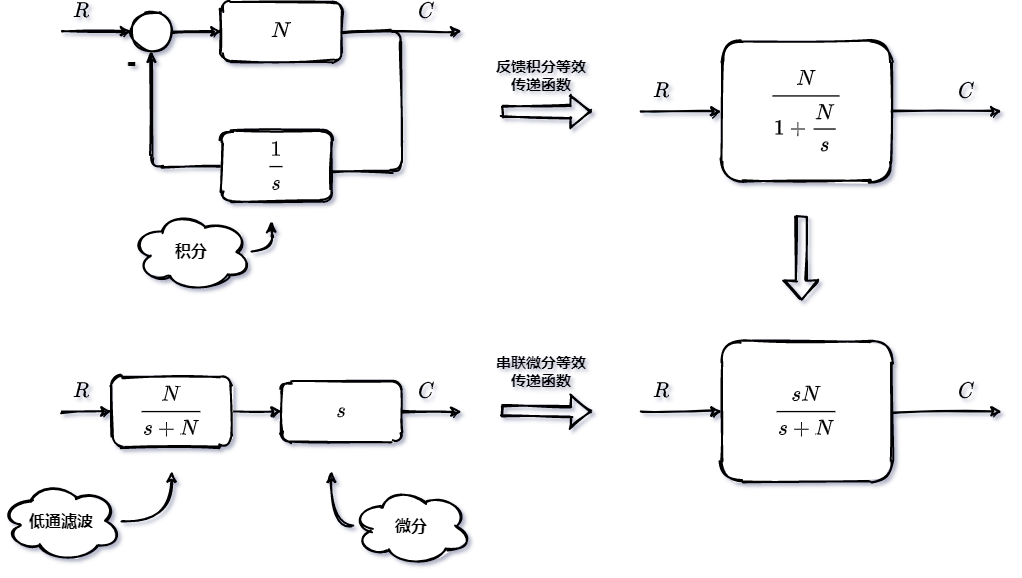
所以下面我們會(huì)在PID控制器的微分部分加入低通濾波器,這樣對(duì)反饋的信號(hào)進(jìn)行一部分處理,從而減小系統(tǒng)干擾,如下圖所示;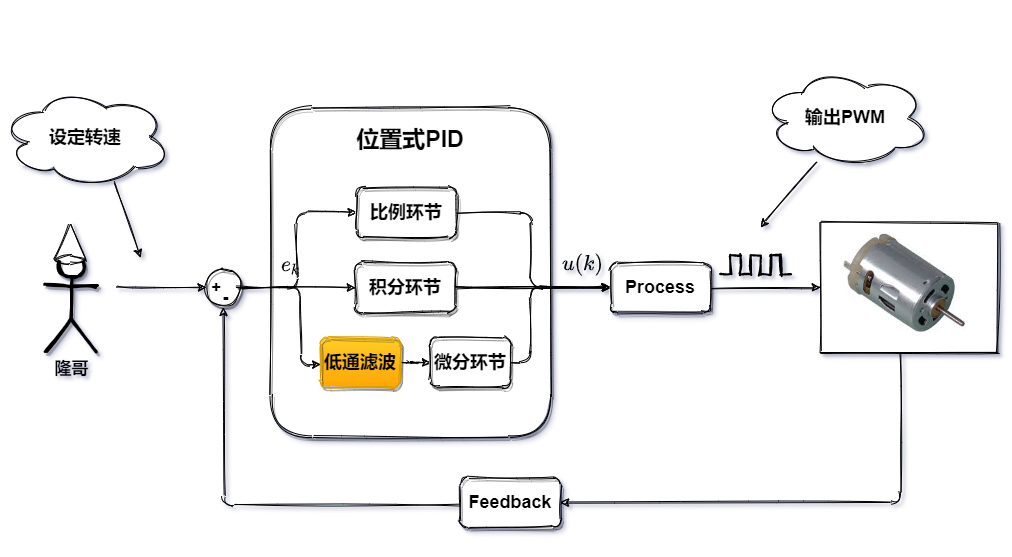
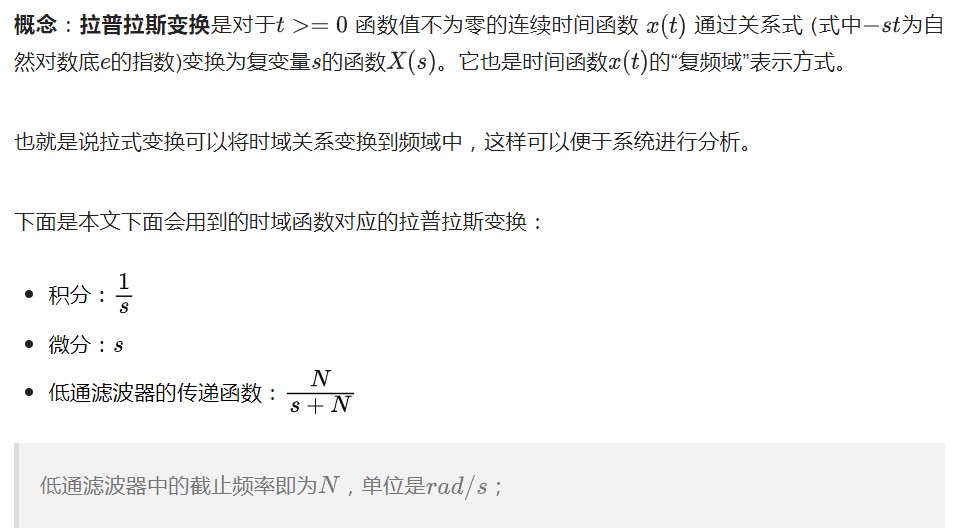
4.1 傳遞函數(shù)
4.2 串聯(lián)微分的等效形式反饋積分
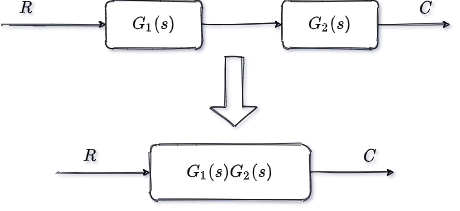
串聯(lián)等效傳遞函數(shù)的關(guān)系為,兩個(gè)方框串聯(lián)等于各個(gè)方框傳遞函數(shù)的乘積;具體如下所示;
因此低通濾波串聯(lián)微分的傳遞函數(shù)為: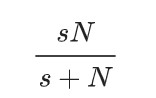
閉環(huán)負(fù)反饋的等效傳遞函數(shù)的關(guān)系如下所示;
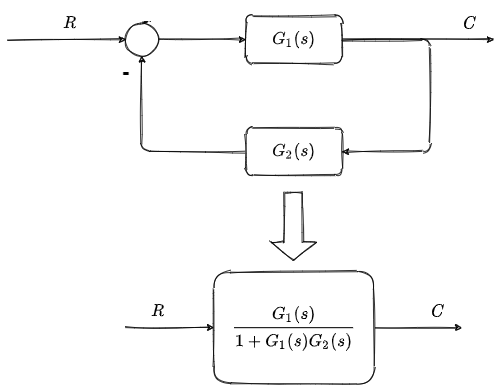
這里我們可以使用負(fù)反饋積分的方式,構(gòu)建等效于串聯(lián)微分的傳遞函數(shù),最終的傳遞函數(shù)結(jié)果是相同的,具體如下圖所示;
串聯(lián)微分的形式,可能在算法的實(shí)現(xiàn)上會(huì)更加直觀,但是會(huì)比較費(fèi)資源;
使用負(fù)反饋積分的等效形式進(jìn)行實(shí)現(xiàn),則進(jìn)一步減少了算法的資源消耗,下面給出一個(gè)TI公司的PID算法實(shí)現(xiàn)就是通過負(fù)反饋積分的等效形式進(jìn)行實(shí)現(xiàn)的。
5 C語(yǔ)言實(shí)現(xiàn)
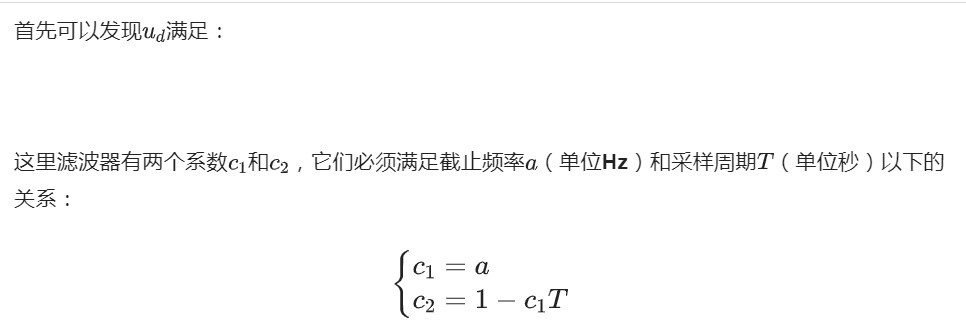
這里直接使用了TI公司的PID算法,對(duì)于微分部分做了濾波的處理,并且使用的是負(fù)反饋積分的方式, 具體可以參考controlSUITElibsapp_libsmotor_controlmath_blocksv4.2pid_grando.hPID控制器的整體框圖如下所示,我們只關(guān)心微分部分;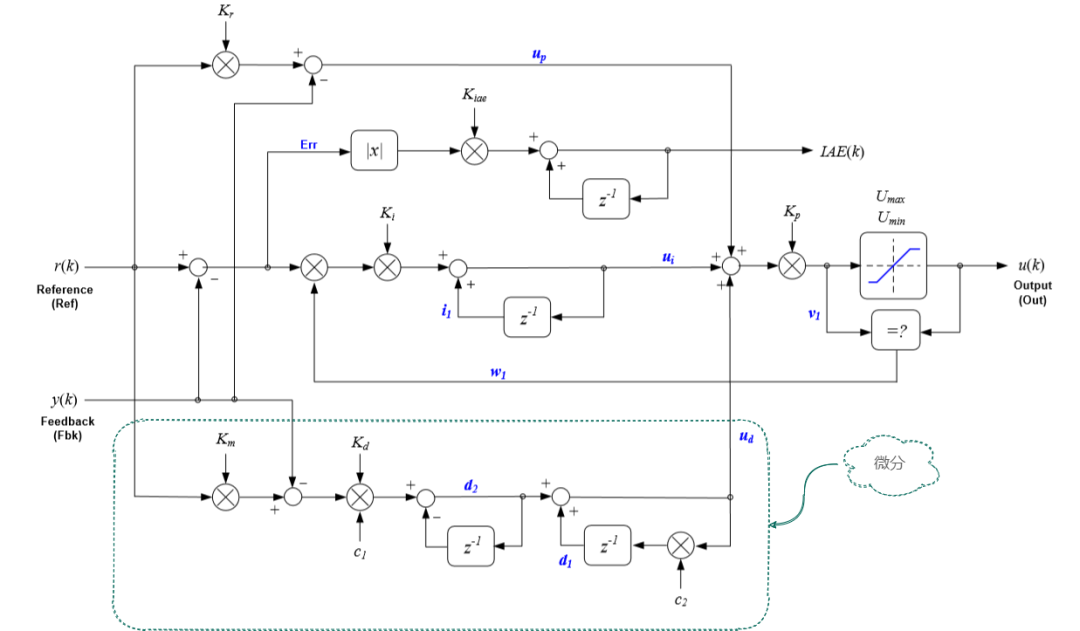
C語(yǔ)言實(shí)現(xiàn)如下:
/*=================================================================================
Filename:PID_GRANDO.H
===================================================================================*/
#ifndef__PID_H__
#define__PID_H__
typedefstruct{_iqRef;//Input:referenceset-point
_iqFbk;//Input:feedback
_iqOut;//Output:controlleroutput
_iqc1;//Internal:derivativefiltercoefficient1
_iqc2;//Internal:derivativefiltercoefficient2
}PID_TERMINALS;
//note:c1&c2placedheretokeepstructuresizeunder8words
typedefstruct{_iqKr;//Parameter:referenceset-pointweighting
_iqKp;//Parameter:proportionalloopgain
_iqKi;//Parameter:integralgain
_iqKd;//Parameter:derivativegain
_iqKm;//Parameter:derivativeweighting
_iqUmax;//Parameter:uppersaturationlimit
_iqUmin;//Parameter:lowersaturationlimit
}PID_PARAMETERS;
typedefstruct{_iqup;//Data:proportionalterm
_iqui;//Data:integralterm
_iqud;//Data:derivativeterm
_iqv1;//Data:pre-saturatedcontrolleroutput
_iqi1;//Data:integratorstorage:ui(k-1)
_iqd1;//Data:differentiatorstorage:ud(k-1)
_iqd2;//Data:differentiatorstorage:d2(k-1)
_iqw1;//Data:saturationrecord:[u(k-1)-v(k-1)]
}PID_DATA;
typedefstruct{PID_TERMINALSterm;
PID_PARAMETERSparam;
PID_DATAdata;
}PID_CONTROLLER;
/*-----------------------------------------------------------------------------
DefaultinitalisationvaluesforthePIDobjects
-----------------------------------------------------------------------------*/
#definePID_TERM_DEFAULTS{
0,
0,
0,
0,
0
}
#definePID_PARAM_DEFAULTS{
_IQ(1.0),
_IQ(1.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0),
_IQ(1.0),
_IQ(-1.0)
}
#definePID_DATA_DEFAULTS{
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(0.0),
_IQ(1.0)
}
/*------------------------------------------------------------------------------
PIDMacroDefinition
------------------------------------------------------------------------------*/
#definePID_MACRO(v)
/*proportionalterm*/
v.data.up=_IQmpy(v.param.Kr,v.term.Ref)-v.term.Fbk;
/*integralterm*/
v.data.ui=_IQmpy(v.param.Ki,_IQmpy(v.data.w1,
(v.term.Ref-v.term.Fbk)))+v.data.i1;
v.data.i1=v.data.ui;
/*derivativeterm*/
v.data.d2=_IQmpy(v.param.Kd,_IQmpy(v.term.c1,
(_IQmpy(v.term.Ref,v.param.Km)-v.term.Fbk)))-v.data.d2;
v.data.ud=v.data.d2+v.data.d1;
v.data.d1=_IQmpy(v.data.ud,v.term.c2);
/*controloutput*/
v.data.v1=_IQmpy(v.param.Kp,
(v.data.up+v.data.ui+v.data.ud));
v.term.Out=_IQsat(v.data.v1,v.param.Umax,v.param.Umin);
v.data.w1=(v.term.Out==v.data.v1)?_IQ(1.0):_IQ(0.0);
#endif//__PID_H__
審核編輯:劉清
-
濾波器
+關(guān)注
關(guān)注
162文章
8093瀏覽量
181187 -
PID
+關(guān)注
關(guān)注
37文章
1480瀏覽量
87451 -
C語(yǔ)言
+關(guān)注
關(guān)注
180文章
7630瀏覽量
140552 -
正弦信號(hào)
+關(guān)注
關(guān)注
0文章
46瀏覽量
16888 -
微分器
+關(guān)注
關(guān)注
0文章
16瀏覽量
6835
原文標(biāo)題:PID微分器與濾波器的愛恨情仇
文章出處:【微信號(hào):pzh_mcu,微信公眾號(hào):痞子衡嵌入式】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
什么是pid控制,什么是pid控制器
pid控制器原理

13個(gè)基于PID控制器的設(shè)計(jì)實(shí)例
pid控制器的輸入輸出_PID控制器的控制實(shí)現(xiàn)
PID控制器控制電壓的詳細(xì)介紹和PID控制器的C程序的概述
過程控制中的PID控制技術(shù)
pid控制器工作原理
PID控制的理論和PID控制器設(shè)計(jì)的及PID控制器參數(shù)整定的以及分析
自動(dòng)化過程的絕佳選擇PID控制器是什么?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論