 MAXQ微控制器中斷編程
MAXQ微控制器中斷編程
閱讀本筆記沒有暗示或要求的特殊知識,但對MAXQ架構和寄存器映射有基本的熟悉是一個加分項。這些信息可以在MAXQ系列用戶指南、數據資料(如MAXQ2000)和其他應用筆記(如MAXQ架構簡介;使用MAXQ2000評估板的示例應用)。本應用筆記中使用的示例的源代碼和項目文件可以下載。
MAXQ10和MAXQ20微控制器具有簡單、廉價的單向量中斷機制,而中斷源和控制則在邏輯上組織成三級分層結構。硬件不會優先考慮中斷。應用程序代碼負責通過單個向量調度各種中斷,因此,對中斷進行編程和調試是應用程序開發周期的重要組成部分。本說明提供:
為需要編寫簡單中斷功能編程的用戶提供的入門指南
有關實現更詳細的中斷優先級方案、嵌套中斷和可用硬件資源的最佳利用的提示。
MAXQ中斷機制概述
MAXQ系列微控制器具有一個寄存器IV(中斷向量),用于保存中斷例程的地址,以及一個位INS(中斷iN服務),用于指示中斷活動。當中斷被觸發時,處理器內核的行為就像在代碼中插入了“呼叫IV”和“移動INS,#1”指令一樣。MAXQ內核執行子程序調用,即指令指針IP被推入堆棧并加載IV寄存器的內容,然后設置INS位表示存在活動的“服務中斷”,以防止進一步的中斷調用。中斷服務以“RETI”(或“POPI”)指令結束,該指令將返回地址從堆棧彈出到 IP 中并清除 INS 位,用戶代碼從中斷的位置恢復。
中斷觸發邏輯如圖1所示,以MAXQ2000微控制器為例。其它MAXQ微控制器可能具有不同的中斷源集,但邏輯結構在整個MAXQ系列中都是通用的。
邏輯結構從圖 1 左側列出的各個中斷源開始。每個源都有一個關聯的中斷標志,即在檢測到來自該源的中斷事件時由硬件設置的特殊位。每個源還具有單獨的使能位,允許應用程序啟用或禁用中斷源。僅當標志位和使能位都設置為 1 時,來自該源的中斷信號才有效。這些位在MAXQ架構中提供單獨的中斷信號和控制。
圖1.MAXQ2000微控制器中的中斷觸發邏輯
由于MAXQ架構是模塊化的,中斷也根據其在模塊中的位置進行分組。與單個中斷源一樣,每個模塊都有自己的中斷標志和使能位,如圖 1 中間所示。該標志是來自該模塊的所有底層中斷信號的邏輯“OR”,而使能位允許應用程序啟用或禁用整個模塊的中斷。這些位分配在兩個8位寄存器中(IIR中的標志和IMR中的使能),并在模塊級別提供中斷信號和控制。
最后,來自所有模塊的中斷信號被“OR化”以形成全局中斷觸發信號,如圖1右側所示。“中斷全局使能”位IGE允許應用禁用或啟用此信號,從而提供全局級別的中斷控制。
設置后,單個中斷標志將保持設置狀態,直到被軟件(即中斷服務代碼)清除,即使導致設置該標志的條件消失或刪除。如果軟件清除標志失敗,退出服務代碼后將反復觸發中斷。模塊化中斷標志(IIR 寄存器)是只讀的;一旦應用程序代碼清除了模塊中的所有基礎單個標志,它就會自動清除。
在圖 1 所示的配置中,右側的全局中斷觸發信號處于活動狀態,由左側的三個獨立源引起:UART1 傳輸、定時器1 溢出和看門狗定時器。這三者都設置了各自的標志和啟用位。另一個源(模塊 8 中的 Ext1)也是信令,但該信號在模塊級別被屏蔽(禁用),因為中斷掩碼位 IMR.1 為 0。中斷服務例程 (ISR) 中的軟件通過分析標志和使能位(圖 1 中以相反的順序顯示,即從右到左)來識別信令源,然后為每個活動源提供服務并清除各個中斷標志。
對簡單的中斷服務例程進行編程
許多應用程序不需要復雜的中斷功能,只需要一兩個中斷,而不考慮優先級。讓我們看看如何為MAXQ編程這樣的服務例程。我們使用IAR嵌入式工作臺作為示例編程工具,但是我們的代碼主要是可移植的(除了一些特定于工具的功能,如下所示)。?
假設現有應用程序需要每毫秒在端口引腳上觸發短脈沖,同時執行許多其他重要任務。這可以使用配置為每 1ms 生成一次中斷請求的板載定時器來實現。
為了完成中斷編程,我們需要向現有的無中斷應用程序添加一些與中斷相關的代碼。與中斷相關的代碼由兩部分組成:初始化和 ISR。初始化代碼放置在應用程序開頭的某個位置,以設置正確的中斷配置:使能位(單個、模塊和全局)和 IV 寄存器。ISR 可以放置在任何位置,并且在退出之前應執行三個基本任務:
確定中斷源(如果僅使用一個源,則不需要)
清除中斷標志
執行所需的操作
首先,讓我們看看這一切在匯編語言中是如何工作的。C程序員可以跳過這一部分,盡管它確實提供了對幕后發生的事情的有用見解。圖 2 顯示了我們的無中斷應用程序的源代碼。除了許多其他非常重要的任務外,它還以0的波特率連續輸出字節35x5(ASCII符號“115200”)。在硬件上運行時,可以通過COM端口輕松捕獲輸出,如圖3所示。
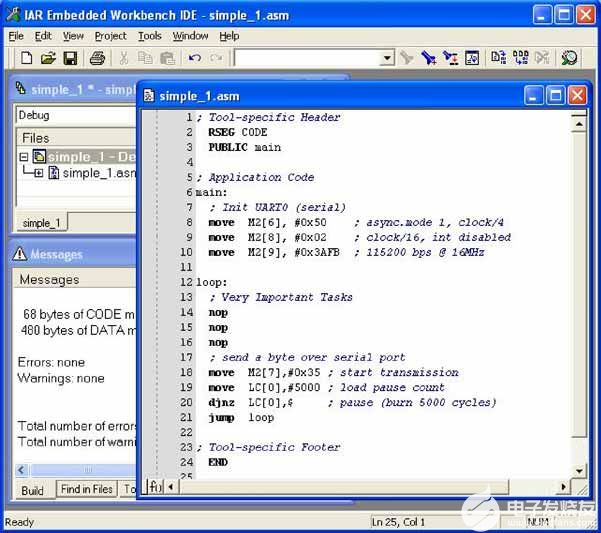
圖2.沒有中斷的示例應用程序代碼。
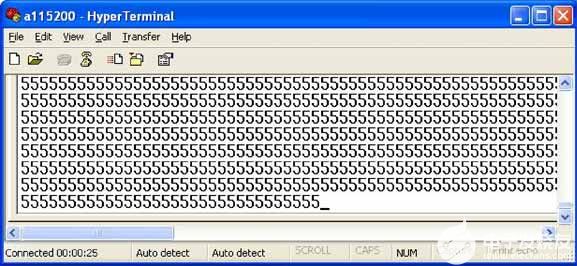
圖3.圖 2 中示例無中斷應用程序的輸出。
現在我們按照上述四個步驟添加中斷代碼,從 ISR 開始。
由于只有一個中斷處于活動狀態,因此不需要源標識;
如果我們使用 Timer1 溢出中斷,則標志是模塊 3 的寄存器 8 的第 4 位。清除它
move M4[8].3,#0 ; clear interrupt flag
如果我們使用端口引腳 P0.0 觸發脈沖,則操作代碼可能如下所示:
move M0[0].0,#1 ; set pin high move M0[0].0,#0 ; set pin low
這解決了任務,但是如果沒有示波器,我們就無法看到結果。為了可視化它,讓我們通過串行端口輸出“5”以外的內容,例如“$”符號(0x24):
move M2[7],#0x24 ; start transmission
通過此添加,我們希望在輸出上的 5 中偶爾出現$s(如果執行 ISR)。請注意,當串行端口忙于傳輸時,可以調用 ISR,從而導致“$”和“5”字符之間的沖突。當然,正確編寫的 ISR 應該避免此類沖突,但為了簡單起見,我們有意忽略了這個問題。
退出
reti ; exit ISR
中斷初始化代碼應:
將定時器1配置為每1ms溢出一次。
move M4[10],#(65536-16000) ; ovfl every 1ms @ 16MHz move M4[9],M4[10] ; init counter move M4[16],#0x0 ; 16-bit timer mode
使用ISR的地址加載IV寄存器。
move IV,# ; load interrupt vector
在所有三個級別啟用 Timer1 溢出中斷:單個、模塊和全局。
move M4[0],#0x88 ; int enabled, start the timer move IMR.4,#1 ; enable ints from module 4 move IC.0,#1 ; enable global interrupts (IGE=1)
我們還必須初始化端口引腳,即設置方向和電壓電平:
move M0[16].0,#1 ; Configure Port Pin P0.0 direction (output) move M0[0].0,#0 ; Set Port Pin P0.0 Low
將所有部分組裝在一起,我們最終得到圖 4 中所示的代碼及其輸出(如圖 5 所示)。$s如預期的那樣,端口引腳P0.0每1ms發射一次短脈沖。由于上述傳輸沖突,$s和 5 的模式并不完全規則——有些$s無法通過。
現在讓我們在 C 中重做相同的應用程序。這甚至更容易,因為C編譯器將為我們做一些工作。也就是說,IAR C 編譯器將中斷向量 IV 設置為通用 ISR,用于標識信令模塊并調用與此模塊對應的 C 函數。它還負責保存/恢復 ISR 內部使用的寄存器,因此應用程序流不會因中斷而中斷。我們需要做的就是為每個模塊編寫 ISR 函數,該函數將生成中斷并進行配置,即正確設置啟用位。后者很重要 — 如果應用程序錯誤地啟用了沒有相應 ISR 功能的中斷,則結果將難以預測。
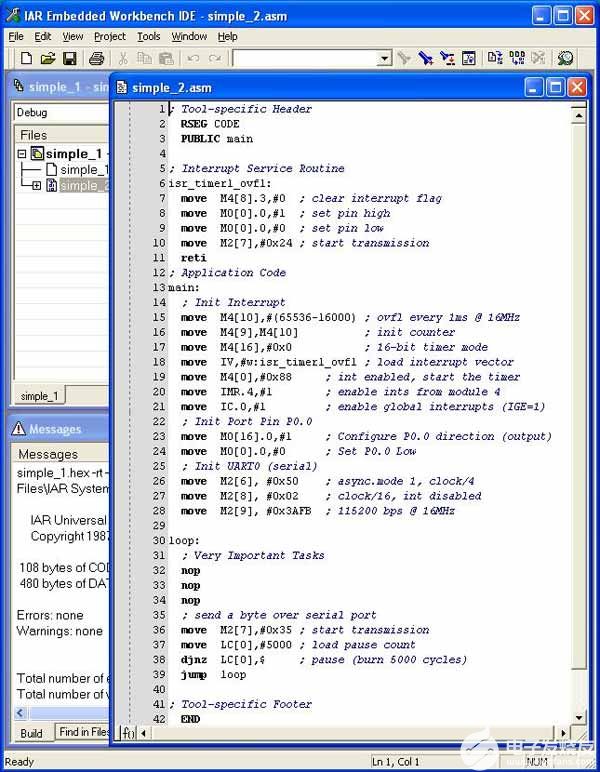
圖4.帶中斷的示例應用程序代碼。
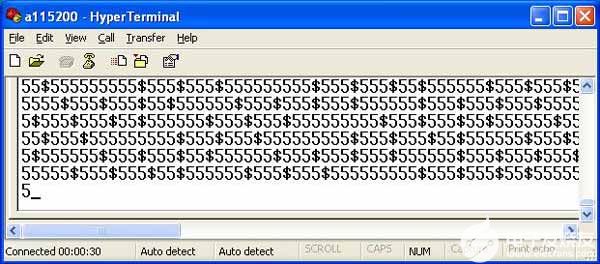
圖5.圖 4 和圖 6 中示例應用程序的典型輸出。
我們現在遵循相同的邏輯步驟,但這次對 ISR 函數使用 C 語法。
來源識別。我們必須告訴編譯器哪個模塊是中斷的來源:
#pragma vector=4
__interrupt void isr_module4() {}
#pragma 指令和關鍵字__interrupt通知編譯器,當模塊 4 有活動中斷信號時,應調用以下示例中的 isr_module4())。由于模塊 4 中只有一個源處于活動狀態,因此不需要更多源標識。
清除標志。如果我們使用定時器1溢出中斷,則標志在寄存器T2CNB2中為位TF1。清除它
T2CNB1_bit.TF2=0; // clear interrupt flag
請注意,名稱 TF2 和 T2CNB1_bit 分別只是位 3 和寄存器 M4[8] 的替代品。它們在特定于工具的包含文件“iomaxq200x.h”中定義。
中斷操作。在端口引腳 P0.0 上發出脈沖:
PO0=1; // set pin high PO0=0; // set pin low
退出。無事可做;編譯器會處理這個問題。
SBUF0='$'; // start transmission
同樣,中斷初始化代碼是直接的ASM到C轉換,除了設置由編譯器自動完成的IV寄存器:
將定時器1配置為每1ms溢出一次。
T2R1=65536-16000; // ovfl every 1ms @ 16MHz T2V1=T2R1; // init counter T2CFG1=0; // 16-bit timer mode
使用 ISR 地址加載 IV 寄存器 — 由編譯器完成。
在所有三個級別啟用 Timer1 溢出中斷:單個、模塊和全局。
T2CNA1=0x88; // int enabled, start the timer IMR_bit.IM4=1; // enable ints from module 4 IC_bit.IGE=1; // enable global interrupts (IGE=1)
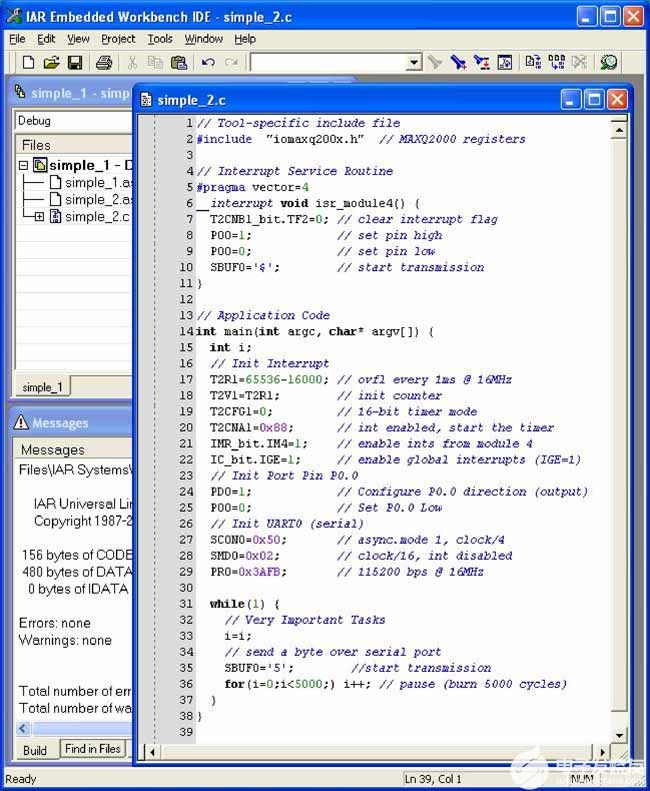
圖6.在 C 語言中使用中斷的示例應用程序。
我們還必須初始化端口引腳,即設置方向和電壓電平:
PD0=1; // Configure P0.0 direction (output) PO0=0; // Set P0.0 Low
將所有部分組裝在一起,我們最終得到圖 6 中所示的代碼。在硬件上運行時,其輸出看起來與圖 5 所示相同。
對嵌套中斷進行編程
通常,當中斷被處理時,觸發信號在全局級別被稱為INS的特殊位阻止(圖1中未顯示)。該位在進入 ISR 時由硬件自動設置,并在執行 RETI 或 POPI 指令時清除(通常在退出 ISR 時)。當 INS = 1 時,無法觸發中斷。但是,某些應用程序可能希望允許嵌套或遞歸中斷。這可以通過清除 ISR 內的 INS 位來完成,從而允許中斷中斷服務例程流。請注意,第二個中斷調用將向量到與第一個中斷調用相同的 IV 寄存器指向的 ISR,因此應用程序在允許遞歸中斷調用時應針對無限循環進行配置。
圖7顯示了一個在端口引腳(連接到按鈕)的下降沿激活中斷的應用。本應用使用模塊0中的MAXQ2000上的Ext0中斷。按鈕連接到相應的端口引腳P0.4。中斷服務例程旨在通過清除 INS 位(圖 14 中的第 7 行)來中斷其自身的代碼。為此目的提供了內在函數 __reenable_interrupt(),盡管可以通過直接寫入位來完成相同的工作:IC_bit。INS=0;。為了防止無限循環,ISR 通過在進入時遞增全局變量nest_level和在退出時遞減來計算嵌套級別。僅當嵌套級別不超過特定限制時,才會清除 INS 位(此示例中最多允許 7 個級別)。
當沒有發生中斷時,應用程序通過串行端口連續輸出字符“0”,指示正在執行 main() 函數。按下按鈕時,ISR 會打印當前嵌套級別并執行空閑循環幾秒鐘,以便在 ISR 仍在運行時再次按下按鈕。當嵌套達到級別 7 時,不再清除 INS 位。如果在級別 7 執行 ISR 時按下該按鈕,則新的中斷請求將保持掛起狀態(設置了標志,但觸發信號被 INS = 1 阻止),直到 ISR 完成并退出,清除 INS 位并在級別 6 恢復 ISR。然后,掛起的中斷變為活動狀態,并再次導致級別 7 的 ISR 呼叫。圖 8 說明了這種描述的行為 — 每個非零數字表示一個 ISR 條目,包括遞歸中斷調用。
編程中斷優先級方案
到目前為止,我們只考慮了一個中斷源的簡單應用程序。更高級的應用可以同時使用多個中斷源,例如RTC報警,定時器/計數器,按鈕或其他外部I / O信號,看門狗,發送/接收與UART的通信,SPI?、1-Wire等各種中斷可能會來來去去,多個中斷源可能會同時變為活動狀態,但應用程序一次只能為它們提供服務。因此,應用程序必須應用一些規則來決定應首先、第二、依此類推為哪些同時處于活動狀態的源提供服務。這些規則通常以中斷優先級表示 — 為每個中斷源分配一個稱為優先級的整數。如果發生沖突,優先級較高的源會先于優先級較低的源進行服務。?
在MAXQ架構中,這種中斷服務排序必須在軟件中實現,因為不存在硬件優先級。在本應用筆記中,我們僅考慮確定中斷服務優先級的眾多可能方法中的兩種:
源標識排序(無遞歸中斷)
動態中斷重新配置(帶遞歸中斷)
事實上,這兩種方法都可以在一個應用程序中混合在一起,正如我們將在下面的示例中看到的那樣,創建靈活有效的中斷服務結構。
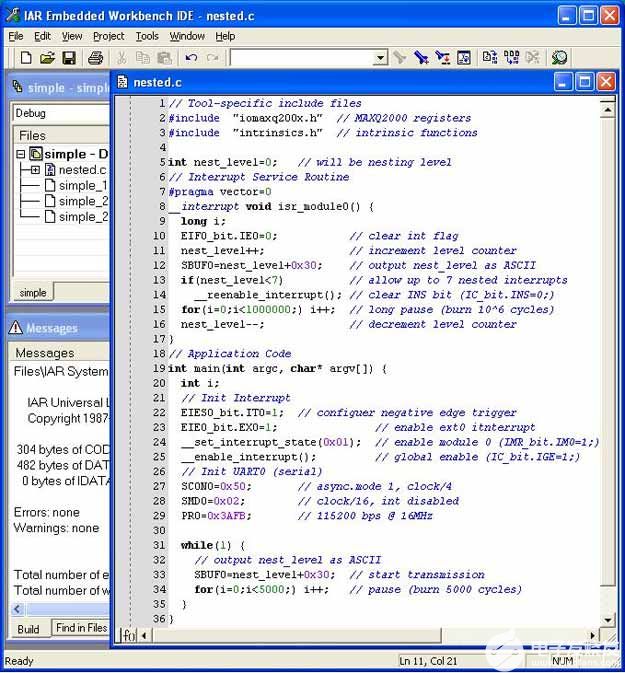
圖7.在 C 語言中具有嵌套中斷的示例應用程序。
前一種方法意味著安排ISR的來源識別部分,以便首先識別和維修優先級較高的源,然后再識別和維修優先級較低的源。例如,假設圖 1 中的三個源同時發出信號,但應用程序希望首先處理看門狗中斷,然后處理 Timer1 溢出,然后處理 UART1 傳輸。該任務可以通過以下偽代碼解決:
if () { } if ( ) { } if ( ) { }
這種簡單的技術幾乎沒有開銷;它不需要額外的內存或遞歸中斷調用。每個中斷都按照接收順序從頭到尾執行,除非有兩個或多個中斷掛起。在這種情況下,服務順序由應用程序代碼中的源標識排列定義。但這種方法有一個缺點:如果在為另一個源提供服務時發生緊急、優先級最高的中斷,則必須等到 ISR 完成,到那時可能為時已晚。為了克服這個問題,我們必須允許中斷ISR流,這就引出了第二種方法——動態中斷重新配置。
后一種方法更通用,意味著每個單獨的 ISR 需要執行以下步驟:
保存當前中斷配置并重新配置整個使能位集,以禁用所有較低(低于當前)或同等優先級的源,但啟用更高優先級的源
允許遞歸中斷,即清除 INS 位
執行當前中斷的操作
禁止遞歸中斷,即設置 INS 位
恢復保存在步驟i)中斷配置并退出。
此實現允許幾乎立即為較高優先級的中斷提供服務,即使它在為較低優先級的源提供服務時發生。但是,此方法會消耗更多的數據和程序空間,并且隨著方案中添加的每個額外中斷源而增加。
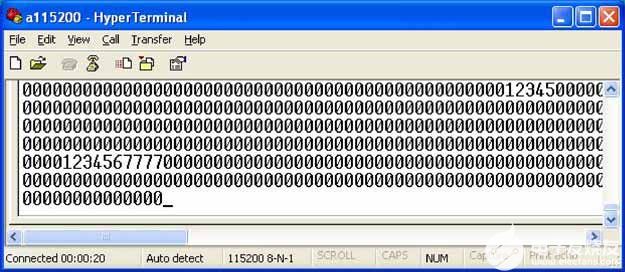
圖8.圖 7 中示例應用程序的輸出。
為了演示這兩種方法,我們創建一個MAXQ2000應用示例,具有以下中斷優先級方案:
| 中斷源 | 源模塊 | 優先權 | 中斷操作 |
| 看門狗定時器 | 7 | 99 (最高) | 清除看門狗定時器;將符號打印到 UART0 |
| UART0 傳輸 | 2 | 70 | 從緩沖區傳輸下一個字節(如果有) |
| 定時器1 溢出 | 4 | 50 | 在端口引腳 P0.0 上觸發脈沖(每 128 毫秒) |
| 外部國際 0 | 0 | 30 | 非常重要的按鈕操作(紅色按鈕) |
| 外部國際 10,11,12 | 1 | 10, 11, 12 | 按鈕操作(綠色按鈕) |
看門狗定時器具有最高優先級,因為如果未及時清除,它將重置設備。然后我們利用UART的傳輸中斷,它表示一個字節已成功發送,下一個字節傳輸可以開始。此中斷也是確保快速通信和防止緩沖區溢出的高優先級。接下來是Timer1,它以相對較慢但有規律的速度發射脈沖。按鈕中斷的優先級較低,因為它們是不規則的。
模塊化架構使在模塊級別分配優先級變得簡單方便。在這種情況下,唯一要保存/重新配置/恢復的配置數據是 IMR 寄存器,即 8 位模塊中斷掩碼。否則,必須在每個單獨的 ISR 中存儲、重新配置和恢復整個分散的單個使能位集。因此,我們為模塊實現了通用優先級方法(動態重新配置),但對模塊內的中斷源實現了簡單的排序方法。
我們示例中的模塊 1 有多個中斷源,圖 9 顯示了如何在模塊 1 中斷例程 isr_module1() 中實現優先級。首先,它保存當前中斷配置(圖 39 中的第 9 行),然后重新配置中斷以禁用模塊 1 中的源,但啟用更高優先級的模塊 0、4、2、7(第 40 行),并通過清除 INS 位(第 41 行)重新啟用中斷。然后,它按照優先級順序識別模塊 1 中的中斷源并為其提供服務。首先檢查優先級較高的 int12(第 45-50 行),其次檢查優先級較低的 int11(第 52-57 行),最后檢查優先級最低的 int10(第 59-64 行)。這些中斷的服務例程具有較長的延遲循環(在 button() 函數內部,圖 48 中的第 55、62 和 9 行),因此在中斷例程 isr_module1() 仍在運行時可能會發生其他中斷。
其他中斷也以類似的方式設計(請參閱附錄A中的完整源代碼,可供下載),但優先級最高的看門狗中斷除外,其中不需要重新配置。應用程序通過 UART0 寫入各種 ASCII 標記,以便可以在 PC 上捕獲它們以可視化執行流程。為了演示,硬件組裝有兩個按鈕:一個連接到引腳P0.4,按下時激活外部中斷0;另一個連接到引腳 P5.2、P5.3、P6.0,分別對應于外部中斷 10、11、12,因此當按下該按鈕時,所有三個中斷都會同時激活。由于前一個中斷 Ext0 具有更高的優先級,因此我們將其稱為“紅色按鈕”,而另一個按鈕將稱為“綠色按鈕”,激活三個優先級較低的中斷。
當未按下任何按鈕時,應用程序打印“=Reset=”,然后連續寫入單詞“Main”,點“...”和單詞“”,表示重置后它執行main()函數,并且經常被看門狗(點)中斷,偶爾被Timer1溢出打斷(參見圖10)。當檢測到任何按鈕中斷時,應用程序在 ISR 條目上打印“”,在 ISR 出口時打印“ExtN>”(N 是外部中斷的編號)。對于圖 10 中的示例,按下“綠色”按鈕一次,然后按幾次“紅色”按鈕。“綠色”按鈕同時激活了三個外部中斷 — 10、11 和 12 — 但如圖 10 所示,int12 首先根據其優先級提供服務,而 int11 和 int10 處于掛起狀態。ISR 顯然被看門狗和計時器打斷。緊接著是 int11(int10 仍處于掛起狀態),它被使用“紅色”按鈕激活的更高優先級的 int0 打斷。最后,緊跟在 int11 之后的是 int10,而 int0 又被按下 (int10) 的“紅色”按鈕打斷了幾次。在這個過程中的某個時刻,所有優先中斷都被嵌套了:main功能被int0按鈕中斷,被int1按鈕中斷,被Timer<>溢出中斷,被UART傳輸中斷,被看門狗中斷!
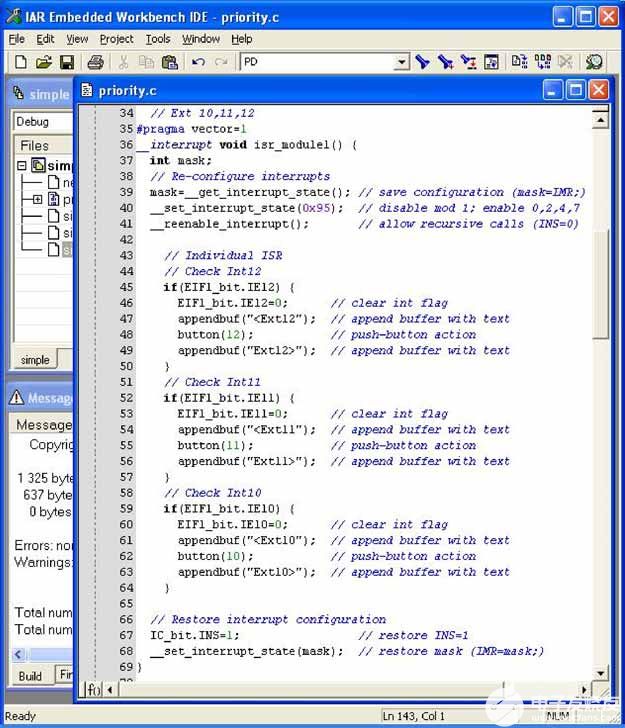
圖9.具有多個優先級中斷的示例應用程序(片段)。
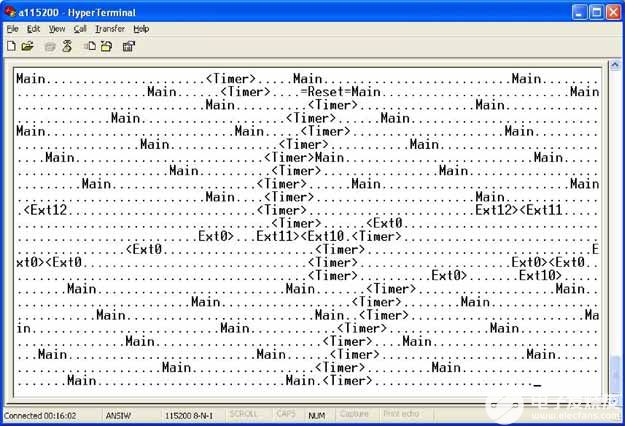
圖 10.圖 9(附錄 A)中示例應用程序的輸出。
結論
MAXQ微控制器的中斷機制非常簡單,可配置性強,使得MAXQ的中斷編程變得容易。盡管硬件資源有限,但MAXQ獨特的模塊化架構允許開發人員以極低的開銷實現復雜的中斷優先方案。
審核編輯:郭婷
-
微控制器
+關注
關注
48文章
7922瀏覽量
153788 -
處理器
+關注
關注
68文章
19824瀏覽量
233694 -
寄存器
+關注
關注
31文章
5424瀏覽量
123500
發布評論請先 登錄
帶紅外模塊的16位微控制器MAXQ61C電子資料
16位微控制器MAXQ613電子資料
16位微控制器具有紅外模塊MAXQ610電子資料
MAXQ微控制器的中斷編程
在應用編程MAXQ微控制器中可分區擦除的程序和數據閃存
在MAXQ8913微控制器中從RAM執行應用程序
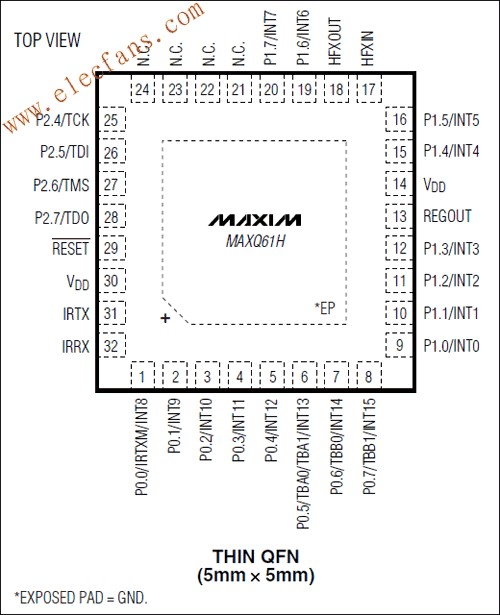
MAXQ61H 低功耗、16位MAXQ微控制器
MAXQ618 低功耗6位MAXQ微控制器

MAXQ612/MAXQ622低功耗、16位MAXQ微控制器


使用uIP堆棧將MAXQ微控制器聯網
為MAXQ2000微控制器實現JTAG自舉加載程序主控





 工商網監
工商網監
評論