 905納米波長激光雷達成主流?陶瓷基板功不可沒
905納米波長激光雷達成主流?陶瓷基板功不可沒
激光雷達(Light Detection And Ranging,簡稱"LiDAR")測 量 , 是 一 種 集 激 光 、 GPS(全 球 定 位 系 統)和 IMU (InertialMeasurement Unit,慣性測量裝置)三種技術于一身的系統,用于獲得數據并生成精確的DEM(數字高程模型)。這三種技術的結合,可以高度準確地定位激光束打在物體上的光斑,測距精度可達厘米級,激光雷達最大的優勢就是精準和快速、高效作業。
激光雷達當前被廣泛用于無人駕駛汽車和機器人領域,被譽為廣義機器人的“眼睛”,是一種通過發射激光來測量物體與傳感器之間精確距離的主動測量裝置。
激光雷達通過激光器和探測器組成的收發陣列,結合光束掃描,可以對廣義機器人所處環境進行實時感知,獲取周圍物體的精確距離及輪廓信息,以實現避障功能;同時結合預先采集的高精地圖,機器人在環境中通過激光雷達的定位精度可達厘米量級,以實現自主導航。
激光雷達可以高精度、高準確度地獲取目標的距離、速度等信息或者實現目標成像。激光雷達工作過原理:激光通過掃描器單元形成光束角度偏轉,光束與目標作用形成反射/散射的回波。當接收端工作時,可產生原路返回的回波信號光子到達接收器,接收端通過光電探測器形成信號接收,經過信號處理得到目標的距離、速度等信息或實現三維成像。
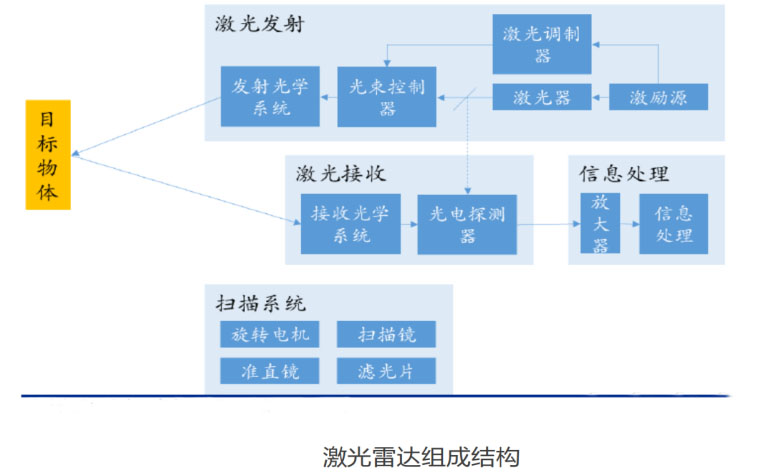
激光雷達由激光發射、激光接收、信息處理、掃描系統四大基礎系統構成,這四大系統相互協作,進而短時間內獲取大量的位置點信息,并根據這些信息實現三維建模。其中激光發射器通過光束控制器控制發射激光的方向和線數,最后通過發射光學系統,將激光發射至目標物體;激光接收系統為接收光學系統,光電探測器接受目標物體反射回來的激光,產生接收信號;信息處理系統接收信號經過放大處理和數模轉換,經由信息處理模塊計算,獲取目標表面形態、物理屬性等特性,最終建立物體模型;掃描系統以穩定的轉速旋轉起來,實現對所在平面的掃描,并產生實時的平面圖信息。
在激光雷達中,發射端是價值量最高、壁壘最高的環節之一。在發射端中,隨著國內產業鏈崛起以及產業的整體技術路線調整,905nm VCSEL激光芯片等產品有望在市場實現突破。此外,1550nm光源也具備獨特優勢,與主流的905nm形成錯位競爭,未來隨著FMCW測距路線的逐步發展,預計其份額還有進一步增長的空間。發射端的“心臟”就是光源,光源的選擇制約因素主要有性能、成本、產業鏈成熟度、人眼安全四大要素。光源選擇完之后,需要解決光源校準、溫漂、無熱化三大問題。那么為何有905nm與1550nm兩條路線,而不是其他波長?這首先受到激光傳播窗口的限制。大氣吸收譜限制了哪些激光波長能夠在空氣中使用,比如300nm以下的短波會被臭氧吸收,1微米以上的紅外波長又經常會被水蒸氣吸收,所以激光器通常只能在少數特定窗口工作,如下圖白色背景部分(可以注意到很大一部分與可見光波長重合)。白色窗口中又有一大段是可見光,如果直接采用可見光又會對人眼產生視覺干擾,所以剩余的傳播窗口是有限的。圖中四條紅線從左到右分別代表865nm、905nm、1310nm、1550nm波長,均處于白色窗口中,都能在空氣中正常工作。
最終選擇哪個波長還與現存的產業鏈成熟度有關。1550nm光纖激光器是光通信領域應用最廣的光源之一,而905則與消費電子共用產業鏈(手機上的3D ToF傳感器通常使用940nm光源,與905基本屬于同種半導體激光器,可以共用GaAs材料體系),所以都有一定的發展基礎。1550nm的波長允許的峰值功率高,更具有探測優勢,而905nm波長使用的材料體系則更有成本優勢。同時由于905nm更接近可見光,視網膜對其更敏感,液態水對其吸收也更少,因此這種光線更容易直達視網膜。相比而言,1550nm容易被水吸收,因此在抵達視網膜之前已經被玻璃體等前部結構進行一輪吸收,抵達視網膜的較少。同時1550nm光折射率更大,即便是抵達視網膜,也不容易聚焦成很小的光點,能量相對分散,進一步減小了損傷。綜上所述,在考慮了人眼限制的因素上,1550nm路線的探測距離優勢明顯,而受到材料限制,905nm路線的成本優勢也同樣明顯,因此二者構成錯位競爭。預計1550nm激光雷達將主要用于以安全性為核心賣點的車輛(如沃爾沃等)、價位和品牌定位較為高檔的車輛(如蔚來、奔馳、上汽飛凡R等)、重卡(剎車距離較長,奔馳重卡采用1550nm激光雷達)等特殊定位的車輛。其余車輛受限于成本,則更適合采用905nm激光雷達。
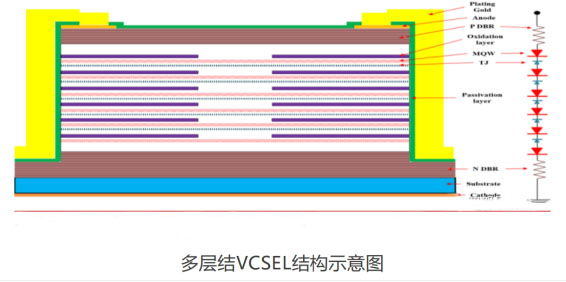
雖然目前激光雷達領域的光源還是以EEL為主,但在905nm波長上,隨著多結工藝提升了發光功率,VCSEL替換EEL的趨勢越來越明顯,國內激光芯片企業迎來發展機遇。VCSEL取代EEL的首要原因是成本,由于VCSEL是上表面發光而不是側面發光, 不需要在側面進行太多加工,只需要按照正常的半導體加工工藝批量處理即可。而EEL是側面發光,所以在形成晶圓后還需要進行切割,分別對每個激光器的側表面進行處理、鍍膜,無法按照現有半導體工藝來一次性處理整個晶圓的激光器,成本較高。按照Yole的統計,EEL的后道處理工序成本比VCSEL高了一倍以上。如果再考慮給EEL增加DBR,就需要在EEL側面沉積多層晶體,成本會進一步提高。VCSEL取代EEL的第二大原因是因為過去VCSEL發光功率低的問題已經被新的“多結”工藝所解決。半導體激光器本質上作為一種二極管,也是PN結構成的,所謂多結就是多個PN結。在最初始的LED和激光二極管中,通常只用1個PN結進行發光。而隨后為了加大功率,人們開始將一個半導體激光器制作成多層PN結的結構,每一個PN結都能夠發光,這就大大增加了發光強度。根據劉恒等發布的《用于激光雷達的高性能多結VCSEL芯片的研究》,下圖49是一個6層結的VCSEL,圖中“MQW”所指向的區域就是發光層,總共有6個,相當于6個PN結,電流從上到下依次流經6個PN結,就能讓6個PN結同時發光,相當于6個串聯的激光二極管。
近年來結數的增多讓905NM的VCSEL發光功率迅速增大,快速接近EEL。此前由于VCSEL發展較晚,而且更多用于消費電子,對大功率沒有需求,所以此前大多都是單層結的,功率較小。而激光雷達的發展對大功率激光器提出了需求, 做出多層結的VCSEL并不存在原理上的困難,只是需要時間進行工藝開發,因此隨著近年來VCSEL結數的不斷增加,最后一塊短板已經被補齊,在激光雷達領域替代EEL已經完全可行。
發射端如果想要保證持續可靠的工作,還需要注意的一點就是盡量避免發熱的影響。如果發熱得不到有效控制,則溫度上升,不僅會導致激光器溫漂,還會導致其他元件變形,對光路產生影響。由于VCSEL功耗等原因需要進行無熱化設計。所謂無熱化,主要是指補償設計,當溫度發生改變,光學器件發生形變,但系統中不同部件的形變效果幾乎恰好抵消,使得光學系統的效果幾乎不受溫度影響。
在激光雷達中,通常主要的發熱部件就是芯片和激光器,針對芯片,通常采用傳導熱能量快、熱阻低的陶瓷材料封裝,輔以導熱膠或導熱硅脂填充進行充分散熱,以免熱量影響自身以及其他部件工作實現良好的散熱。針對大功率激光器主要是采用熱沉進行散熱,熱沉(heat sink)通常是指一些能夠持續吸收熱量或者將熱量導走而又保持溫度穩定的物體,比如導熱率可達200W/M.K的氮化鋁陶瓷基板。以高效導熱著稱的金剛石熱沉其熱導率更是氮化鋁的50~100倍。陶瓷材料與硅片相近的熱膨脹系數更其適合于解決芯片封裝中的熱應力失配問題。多年來斯利通一直致力于陶瓷新型材料的電路板制造研發,目前可批量生產的陶瓷電路板厚度涵括0.1-8.0mm范圍,實現線寬線距40um的微電子技術。
在自動化駕駛的 5 級標準中,L3 級標準下的 ADAS 高級輔助駕駛市場與L4、L5 級標準下的無人駕駛市場都對激光雷達技術產品擁有著較高的需求,隨著中國自動駕駛領域的政策和規范的不斷成熟,激光雷達行業也將迎來廣闊的發展空間。
審核編輯黃宇
-
芯片
+關注
關注
456文章
51224瀏覽量
427406 -
電路板
+關注
關注
140文章
4997瀏覽量
98901 -
激光雷達
+關注
關注
968文章
4029瀏覽量
190434 -
陶瓷基板
+關注
關注
5文章
216瀏覽量
11485
發布評論請先 登錄
相關推薦
淺析自動駕駛發展趨勢,激光雷達是未來?
激光雷達是自動駕駛不可或缺的傳感器
激光雷達分類以及應用
常見激光雷達種類
從光電技術角度解析自動駕駛激光雷達
機器人和激光雷達都不可或缺
毫米波雷達VS激光雷達VS超聲波雷達
激光雷達知多少:從技術上講講未來前景
激光雷達成為自動駕駛門檻,陶瓷基板豈能袖手旁觀
一文通過AEC-Q102車規級芯片測試認證了解激光雷達核心技術及行業格局
車載激光雷達迎來大爆發,陶瓷基板是關鍵






 工商網監
工商網監
評論