 仿生型六足機器人
仿生型六足機器人

這篇文章來源于DevicePlus.com英語網站的翻譯稿。
?CSIRO
由于消費級3D打印的爆炸性增長,使許多學生和業余愛好者能夠通過設計并打印自己的部件或利用開源項目來探索機器人技術。由此萌生了有史以來最具創新性和獨特性的機器人項目。在動物王國中,六足動物是六足節肢動物才算是真正意義的昆蟲。在機器人技術領域,六足機器人這一術語即為這種昆蟲的象征。由于許多六足機器人的設計師都從各種昆蟲及其特定的運動機制中獲取大量靈感,因此統一采用這一名稱是有意義的。以下是我們遇到的一些最具創意的六足機器人。
Scorpion Hexapod(六足蝎子機器人)

?New Atlas
一個學生團隊在比利時的根特大學研制了一臺3D打印機器人,這臺機器人看起來就像是噩夢或未來派科幻電影中的怪物。這只令人印象深刻的六足動物看起來就像爬行的蝎子。它甚至能夠將尾巴向前甩動并“刺痛”那些敢于足夠靠近的人,并在其身上噴射墨水,提醒其被裝有標識物的毒刺扎過。
在設計制造六足機器人的過程中,機器人的制作者考慮了當前流行的許多機器人自制方法。這點在他們的論文摘要中得到了體現:
“蝎子機器人的設計應盡可能具有可重復性、模塊化和適應性,嚴格按照數字生產技術和現成的零件生產。這些生產技術確保機器人及其所有組件易于再現并具有實用性,使每個人都可以創建自己的六足機器人或在未來的工作中優化機器人。”
學生團隊的項目旨在改進2012年研制的Stigmergic螞蟻機器人,并將其作為根特大學工業設計中心的吉祥物。除了對六足螞蟻機器人的功能進行了重新設計以外,他們還希望延長電池壽命并使之更加模塊化。通過使用輕質熱成型聚苯乙烯來降低機器人重量,并增加“待機模式”來省電,從而延長電池使用壽命。機器人的控制中心位于Arduino Nano。采用模塊化的3D打印設計方式可使機器人易于修改和復制。
MX-Phoenix

?Zenta
MX-Phoenix是由挪威工程師和機器人愛好者K?reHalvorsen共同設計的六足機器人,昵稱為Zenta。正如您將在下面的視頻中看到的,這臺像狼蛛一樣強大的六足機器可以適合各種各樣的地形。MX-Phoenix可以在平坦的表面及不均勻的巖石地面行走,還可以上下樓梯。從控制器演示視頻中可看出MX-Phoenix的快速響應速度和非常平穩的步態。
多年來,Zenta設計了許多六足機器人和其他品種的機器人,包括他屢獲殊榮的MorpHex機器人。他陳述了該特定項目的目標:
“更加動態的步態引擎和地形適應能力。我還想制作一臺身體相對較小且腿部較大的六足機器人,我也試圖讓總重量盡可能低。”
機器人的脛骨和身體組件使用Fusion 360設計并使用WANHAO Duplicator i3打印。他還使用丙酮蒸汽處理從而增加了打印的ABS部件的強度。Mx-Phoenix重量為4.76千克(10.5磅),總共使用了來自Robotis的18個Dynamixel伺服系統。C ++代碼中采用了Zenta六足機器人的自定義步態算法(稱為DynaZgait),該算法目前被用于Teensy 3.6 MCU。欲了解有關Zenta項目的更多信息,請訪問zentasrobots.com。
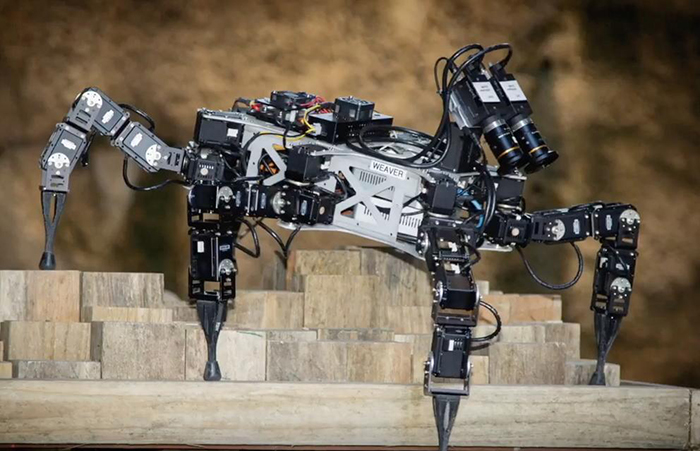
Weaver

?CSIRO
Weaver是一種終極版全地形六足機器人。由聯邦科學與工業研究所的機器人和自控系統小組研制 。
在澳大利亞的(CSIRO)機器人的每條腿上設有五個關節,實現了30°自由度。與更簡單的設計相比,這種驅動量可使六足機器人具有更高水平的本體感覺。本體感覺是指對身體自身各部位的相對位置和運動中使用的力度的自我感覺。外部感知感應能力使Weaver能夠實時實現自我穩定,而無需之前版本中的地形配置功能。
如視頻中所示,Weaver能夠無縫地適應并走遍不同的地形。Weaver還能夠在高達50°的斜坡上保持靜態穩定。
Weaver還可以配備立體視覺,用于確定在所遇到的地形采取最合適的步態。以下視頻中為您展示了引導步態參數選擇的立體視覺演示。
這項技術和研究應用前景廣泛,包括環境研究、探索任務、搜索和救援等等。
制作自己的六足機器人!
六足機器人是最酷的機器人之一!您是否很想制作自己的六足機器人,但不知道從哪里開始?請查閱我們的3D打印Arduino Hexapod教程:

|
此處鏈接轉移至DevicePlus.com英語網站解決方案:Arduino Hexapod 第1部分 — 機械結構和接線 本教程將指導您如何創建自己的Arduino hexapod或Ardupod,使用3D打印機打印所有部件并僅使用12個伺服器來控制機器人。 |
|

|
此處鏈接轉移至DevicePlus.com英語網站Arduino Hexapod第2部分:編程 在Arduino Hexapod系列的第二部分中探討了如何通過逆運動學來編寫第1部分中的Ardupod。 |
|
|
此處鏈接轉移至DevicePlus.com英語網站Arduino Hexapod第3部分:遠程控制 您還可以使用HC-05藍牙無線控制ArduPod。您還可以使用Processing應用程序,這樣您就不必每次都使用書面命令來移動ArduPod。 |

DevicePlus 編輯團隊
設備升級版適用于所有熱愛電子和機電一體化的人。
審核編輯黃宇
-
機器人
+關注
關注
213文章
29749瀏覽量
213010
發布評論請先 登錄
機器人看點:越疆機器人正式發布六足仿生機器狗 智元公布機器人運動控制模型專利
年出貨約2萬臺!中國廠商主導全球四足機器人市場
中國成功研發蚊子大小仿生機器人
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品

盤點#機器人開發平臺
大象機器人攜手進迭時空推出 RISC-V 全棧開源六軸機械臂產品
雅特力科技助力宇樹科技推動智慧機器人創新應用:深入布局機器人電機控制核心

六足仿生機器人地形自適應步態規劃研究
開源項目!基于Arduino控制的六足機器人
四足機器人的結構、控制及運動控制

四足巡檢機器人特點和作用是什么

廣汽輪足人形機器人,保安外賣家教樣樣來
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
在NVIDIA Isaac Lab中訓練四足機器人運動






 工商網監
工商網監
評論