") 基于iToF的3D視覺測量方案
基于iToF的3D視覺測量方案
與通過測量光傳播時間直接計算距離的直接飛行時間(ToF)不同,間接飛行時間(iToF)技術(shù)從反射光脈沖的相位進(jìn)行測量。本文將重點介紹iToF和當(dāng)今部署該技術(shù)的諸多行業(yè),包括機(jī)器人技術(shù)、物流、建筑測繪以及最近的智能交通系統(tǒng)(ITS)。
許多苛刻的應(yīng)用具有許多要求和更多挑戰(zhàn)
能夠從iToF受益的應(yīng)用要求包含一系列特性,包括視場、距離范圍、反射率范圍和3D幀率。這些對于ToF系統(tǒng)和ToF傳感器的設(shè)計至關(guān)重要。由于靈活性,iToF可以為工廠安全等室內(nèi)應(yīng)用和監(jiān)控或ITS等室外應(yīng)用提供精確測量。iToF適用于反射率范圍小的應(yīng)用(如拾放機(jī)器人)和反射率范圍大的應(yīng)用(倉庫/物流管理);適用于車內(nèi)應(yīng)用等短程應(yīng)用和自動駕駛等遠(yuǎn)程應(yīng)用;還適用于機(jī)器人導(dǎo)航等小視場應(yīng)用和建筑/建筑測繪等大視場應(yīng)用。
iToF如何運行?
iToF技術(shù)根據(jù)多個圖像(或相位)來估計物體的距離。如圖1所示,前兩個圖像是在180度相位下獲得的,通過計算每個相位捕獲的電荷比率可以估計距離,其中第三個圖像則用于去除背景噪聲。
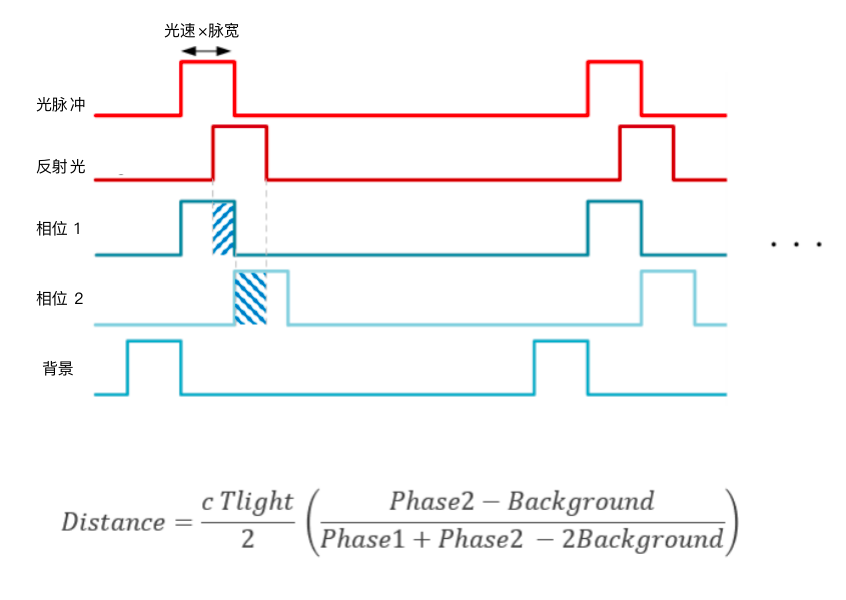
圖1:iToF距離算法示例
“可靠的距離測量”在3D應(yīng)用中意味著什么?這意味著非常精確和準(zhǔn)確的測量,但又不限于此。也就是說不僅要確保精確和準(zhǔn)確地獲得測量結(jié)果,同時具有良好的角分辨率,運動模糊/偽影最小,又要可以以合理的性能感測最小和最大距離處的黑暗和明亮物體,等等。因此,可靠的距離測量與非常高的靈活性緊密相關(guān),更靈活的傳感器可以實現(xiàn)更可靠的測量。
無運動偽影的可靠測量
如上所述,在iToF中,需要多張圖像來估計物體的距離。在所描述的示例中,需要三個圖像(兩個相位+背景)。如果使用當(dāng)今最常見的單暫存節(jié)點像素傳感器,則需要依次曝光和讀出多個相位。拍攝一次光以獲得相位0,另一次以獲得相位1,然后在沒有光和讀出的情況下運行第三次采集以獲取背景。只有這樣才能計算3D圖像。因此,如果有移動的物體,就會出現(xiàn)運動偽影,因為物體在每次捕捉中都會處于不同的位置。此外,光線需要拍攝兩次,每個相位一次。 使用多暫存節(jié)點像素傳感器,例如所示示例的3暫存節(jié)點像素,所有曝光和讀出均以交錯方式進(jìn)行,因此所有相位幾乎都是并行采集的,從而最大限度地減少運動偽影。此外,由于可以使用單列光脈沖即可捕獲所有相位,因此它降低了平均光功率,這從眼睛安全和功耗角度來看都很重要。 圖2描述了這兩種情況:
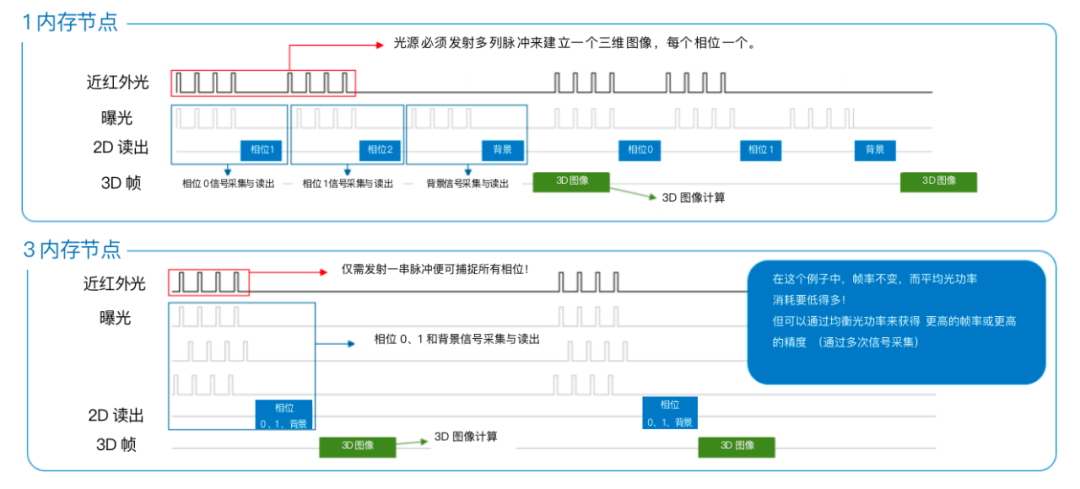
圖2:單暫存節(jié)點和多暫存節(jié)點像素之間的差異
請注意,運動偽影和運動模糊之間的區(qū)別類似于2D視覺中卷簾快門和全局快門之間的區(qū)別。運動模糊可以稍微扭曲快速移動的物體,但不會提供錯誤信息,而運動偽影可以極大地改變物體的外觀并提供錯誤的測量結(jié)果,這在某些應(yīng)用中可能會產(chǎn)生重大后果。
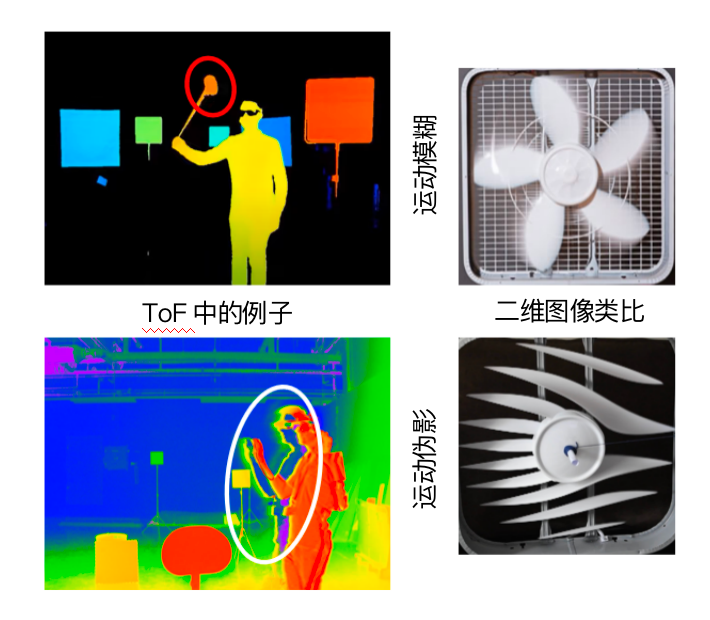
圖3:運動模糊/運動偽影 - 兩種不同的現(xiàn)象
高動態(tài)范圍的可靠測量
ToF的另一個關(guān)鍵問題是動態(tài)范圍。由于物體的反射率和應(yīng)用所需的距離范圍的綜合作用,ToF本質(zhì)上是一種動態(tài)范圍非常高的應(yīng)用。為了說明這一點,假設(shè)一個原始應(yīng)用旨在檢測反射率在15%到85%之間且距離為0.5米到6米的物體,需要改進(jìn)以檢測反射率在1.8%到95%之間且距離達(dá)10米的物體。在這些條件下,新案例需要的動態(tài)范圍是原始案例的25倍以上。這樣的要求僅靠像素本身的滿井容量,不足以滿足。 Teledyne e2v的Hydra3D ToF CMOS圖像傳感器嵌入特定技術(shù)來滿足如此巨大的動態(tài)范圍要求,即通過多次捕獲的非破壞性讀出與高幀率相結(jié)合,使其適用于大多數(shù)應(yīng)用案例。
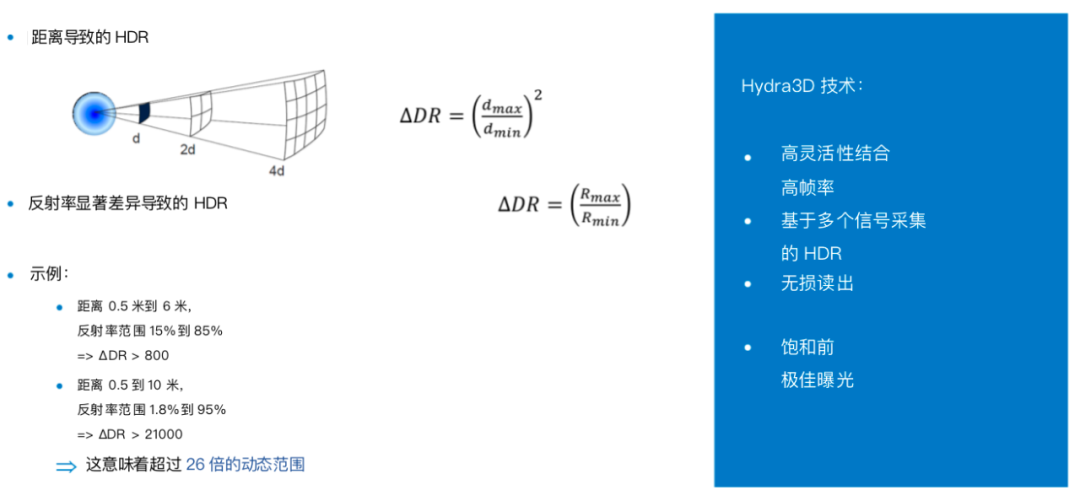
圖4:ToF本質(zhì)上是一個非常高動態(tài)范圍的應(yīng)用,傳感器必須管理它
在所有條件下都具有高度靈活性的可靠測量
在ToF中,蠻力通常不是一個好主意。在距離范圍、反射率、動態(tài)等方面具有高度靈活性以適應(yīng)非常廣泛的情況,顯然是一項重要優(yōu)勢。在Hydra3D中,單個觸發(fā)器啟動一系列采集和讀出并且非常容易編程,從而成為一個非常強(qiáng)大的工具,適應(yīng)每個應(yīng)用的條件。這看似復(fù)雜實際上很簡單,如圖5所示。 第一個藍(lán)色輪廓矩形是三個相位的曝光和讀出,產(chǎn)生一個3D圖像。可以在每個測量序列(綠色輪廓矩形)中進(jìn)行多次采集(藍(lán)色輪廓矩形),以增加動態(tài)范圍或提高精度。此外,具有多個測量序列允許在不同的距離范圍內(nèi)進(jìn)行測量,或以不同的精度水平進(jìn)行測量,或執(zhí)行2D捕獲。這一切都發(fā)生在一個觸發(fā)器中。最重要的是,序列可以逐幀實時更改,而無需停止傳感器。
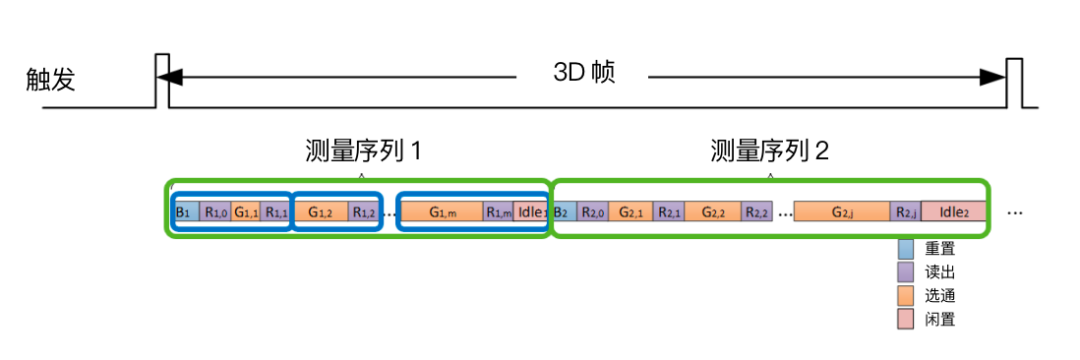
圖5:高度的靈活性允許擁有不同的測量序列以完美地滿足應(yīng)用需求 這種高可配置性可用于為每個應(yīng)用在距離范圍、反射率范圍、精度、幀率、光功率等之間找到最佳權(quán)衡。 現(xiàn)在讓我們看看這種靈活性優(yōu)勢的一些示例: 對于距離范圍和反射率范圍較小的應(yīng)用,具有單個3D采集的配置(僅第一個藍(lán)色輪廓矩形)就足夠了。在這種情況下,動態(tài)范圍不會是最大的,但可以達(dá)到100 fps的幀率,并且完全沒有運動模糊。 對于由于距離范圍和/或反射率范圍大而需要使用HDR功能的應(yīng)用,可以執(zhí)行多次采集和讀出(幾個藍(lán)色輪廓矩形)以增加動態(tài)范圍。通過這樣的應(yīng)用,可以在10米范圍內(nèi)實現(xiàn)大約25 fps,目標(biāo)反射率在15%到85%之間。
對于覆蓋10米距離范圍但使用三個不同范圍以在整個范圍內(nèi)保持高精度的應(yīng)用。為此,可以使用多個測量序列(綠色輪廓矩形)實時從一個切換到另一個,具體取決于目標(biāo)對象的位置。因此,可以在較小的距離范圍內(nèi)達(dá)到精度,但覆蓋的距離范圍更大。
對環(huán)境穩(wěn)健的可靠測量
最后一個挑戰(zhàn)是解決多系統(tǒng)干擾問題。由于ToF需要主動照明,因此一個系統(tǒng)可能會受到在同一區(qū)域同時工作的另一個系統(tǒng)發(fā)出的光的干擾。這會導(dǎo)致不正確的距離測量。為了對這些干擾具有穩(wěn)健性,多系統(tǒng)管理被嵌入到Hydra3D傳感器的片上。正因為如此,系統(tǒng)之間可以完美運行,不會造成任何相互干擾,也不會產(chǎn)生任何聯(lián)系。
傳感器級創(chuàng)新
傳感器級別的創(chuàng)新有助于克服使許多飛行時間應(yīng)用難以有效實施的挑戰(zhàn)。像Teledyne e2v的Hydra3D這樣的傳感器實現(xiàn)了所有這些創(chuàng)新:它高于市場上的平均空間分辨率,具有832 x 600像素,支持高視場和良好的角分辨率。這是一個3暫存節(jié)點像素,適用于三相位iToF技術(shù),即使對于快速移動的物體也能進(jìn)行可靠的3D檢測而不會出現(xiàn)運動偽影。它還可以降低功耗并提高人眼安全性。此外,它在管理高動態(tài)范圍(這在ToF中非常重要)方面非常靈活,使其適用于所有環(huán)境,并且可以配置用于距離測量,包括交錯2D和3D信息捕獲。最后,它集成了一個片上功能,可對在同一區(qū)域工作的其他系統(tǒng)造成的干擾提供穩(wěn)健性,因此相機(jī)制造商在設(shè)計系統(tǒng)時無需解決此問題。 由于機(jī)器人、物流、建筑測繪和ITS等行業(yè)需要更精確和可靠的測量,間接飛行時間技術(shù)將使測量具有穩(wěn)健性和靈活性,沒有偽影。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2564文章
52625瀏覽量
763949 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29509瀏覽量
211643 -
3D
+關(guān)注
關(guān)注
9文章
2952瀏覽量
109488 -
視覺測量
+關(guān)注
關(guān)注
0文章
8瀏覽量
6971 -
itof
+關(guān)注
關(guān)注
0文章
19瀏覽量
2508
原文標(biāo)題:基于iToF的3D視覺測量方案
文章出處:【微信號:機(jī)器視覺沙龍,微信公眾號:機(jī)器視覺沙龍】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于iToF的3D視覺測量方案
ADI公司推出首款用于3D景深測量和視覺系統(tǒng)的高分辨率模塊

哪位大俠用過imaging-lab 開發(fā)過3D視覺測量的項目,求指點
3D視覺的測量原理
3D視覺及AR的測量與應(yīng)用
談3D視覺應(yīng)用方案光學(xué)測量分類以及其原理
一文帶你看懂3D視覺
Zivid 3D視覺解決方案的優(yōu)勢是什么
ADI公司推出首款用于3D景深測量和視覺系統(tǒng)的高分辨率模塊
奧比中光全棧式3D方案助力機(jī)器人視覺進(jìn)化
【世說芯品】ADI推出首款用于3D景深測量和視覺系統(tǒng)的高分辨率模塊

3D視覺的三大優(yōu)勢
多維精密測量:半導(dǎo)體微型器件的2D&3D視覺方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論