") 大眾機(jī)器人視覺抓取問題及抓取步驟
大眾機(jī)器人視覺抓取問題及抓取步驟
最近視覺抓件系統(tǒng)一直會(huì)出現(xiàn)抓取零件不到位的問題.下面我將分析一下問題出現(xiàn)的原應(yīng).
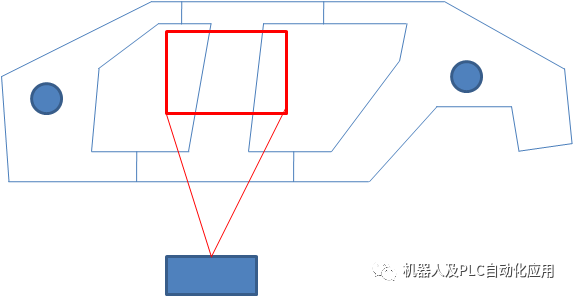
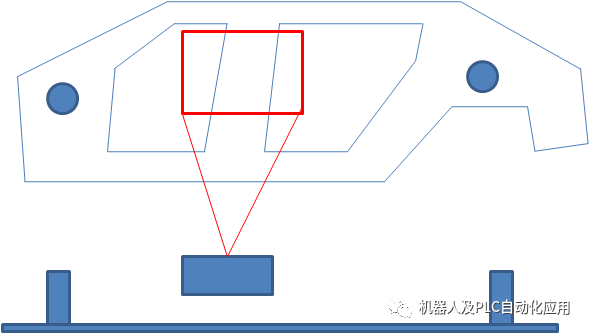
單相機(jī)測點(diǎn),測量車身側(cè)圍外板B /內(nèi)板B,計(jì)算出的車身整體偏差值是B柱的旋轉(zhuǎn)和變化量.因此對于車身整體的變化量存在偏差.零件大的組裝件容易出現(xiàn)這種問題.因此要區(qū)分對待側(cè)圍內(nèi)板和側(cè)圍外部的抓取視覺的計(jì)算方法.
1.車身側(cè)圍內(nèi)板:
應(yīng)設(shè)置兩個(gè)相機(jī)對應(yīng)機(jī)器人抓手上的定位銷附近,計(jì)算兩個(gè)定位空的偏差值.由于機(jī)器人抓手是固定的所以,要計(jì)算出兩空的變化對應(yīng)車身坐標(biāo)系的整體變化值.這樣計(jì)算出的機(jī)器人BASE坐標(biāo)系下的偏差值最準(zhǔn)確,機(jī)器人的抓取效果最好。
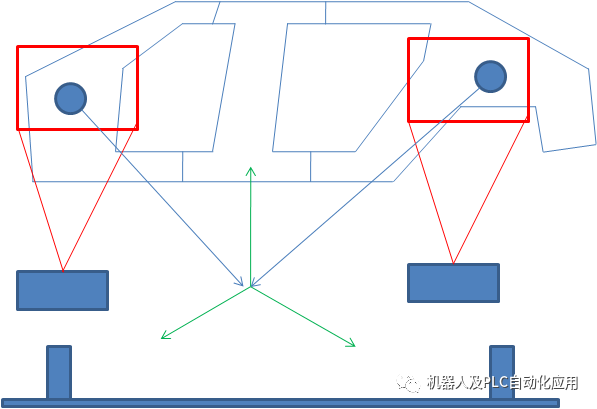
如果機(jī)器人抓手不使用定位銷定位,則可以使用一個(gè)相機(jī)的方法進(jìn)行粗略抓取,問題會(huì)很少。
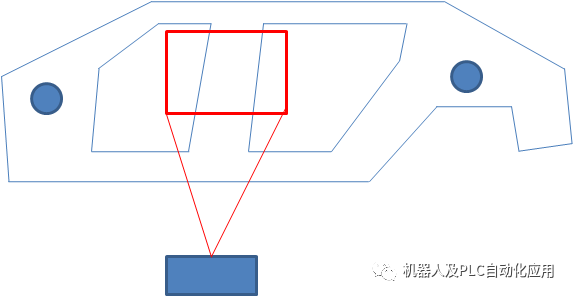
2.車身側(cè)圍外板:
側(cè)圍外板是一個(gè)整體件,用一個(gè)相機(jī)照車身B柱是沒有問題的.整體大件由于不需要搭接工藝,因此可以使用一個(gè)相機(jī)和定位銷定位抓取的方法.
如何保證每次抓取零件時(shí)的位置時(shí)一致的?
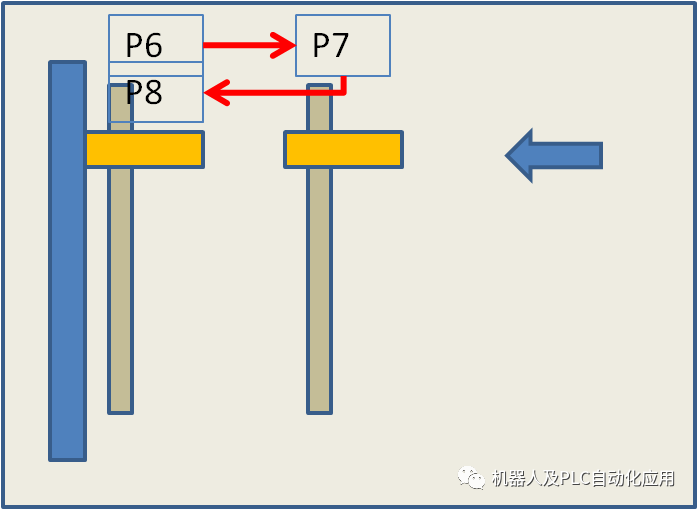
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P
P6 ---接觸工件位置M29
LIN VB=700[mm/s] VE=0% ACC=100% RobWzg=20 Base=31 SPSTrig=5[1/100s]P
P7---返回測量位置
LIN VB=400[mm/s] VE=0% ACC=100% RobWzg=31 Base=31 SPSTrig=5[1/100s]P
P8---抓件
使用大眾標(biāo)準(zhǔn)自帶的USER程序.
LIN SUCHEN VB=350[mm/s] RobWzg=1Base=26 Fern=M28 Vred=10% Nah=M29 P尋找零件
5: Tech_ Baseverschiebung Suchlauf Base 31 setzen - - - xyz-MaxWeg:- Nahsensor=M29 EIN
改變抓件點(diǎn)的BASE程序.
審核編輯:劉清
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29568瀏覽量
211963 -
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4520瀏覽量
122485
原文標(biāo)題:大眾機(jī)器人視覺抓取問題及抓取步驟---1v3.22
文章出處:【微信號(hào):gh_a8b121171b08,微信公眾號(hào):機(jī)器人及PLC自動(dòng)化應(yīng)用】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
【MYD-CZU3EG開發(fā)板試用申請】基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站
【瑞芯微RK1808計(jì)算棒試用申請】基于機(jī)器視覺的工業(yè)機(jī)器人抓取工作站
工業(yè)機(jī)器人與視覺實(shí)訓(xùn)平臺(tái)介紹
機(jī)器人抓取技術(shù)原理分析
抓取作業(yè)機(jī)器人3D視覺系統(tǒng)的設(shè)計(jì)
新算法助力機(jī)器人更輕松地抓取物體
一種基于深度相機(jī)的排爆機(jī)器人自主抓取系統(tǒng)
基于視覺的機(jī)器人抓取系統(tǒng)
3D視覺無序抓取,推動(dòng)智能機(jī)器人無所不在的存在

淺談機(jī)器人視覺抓取的目的
基于視覺的機(jī)器人抓取系統(tǒng)設(shè)計(jì)

基于視覺的自主導(dǎo)航移動(dòng)抓取機(jī)器人搭建方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論