") nRF54L15—藍(lán)牙低功耗雙核系統(tǒng)級(jí)芯片(SoC)
nRF54L15—藍(lán)牙低功耗雙核系統(tǒng)級(jí)芯片(SoC)
nRF54L15 是 nRF54L 系列的首款系統(tǒng)級(jí)芯片 (SoC)。它是一款超低功耗藍(lán)牙 5.4 SoC,具有同類最佳的新型多協(xié)議無線電和先進(jìn)的安全功能。nRF54L 系列以更緊湊的封裝將廣受歡迎的 nRF52 系列提升到新的水平,具有出色的處理能力和效率、擴(kuò)展的內(nèi)存和新型外設(shè)。

一、主要特性:
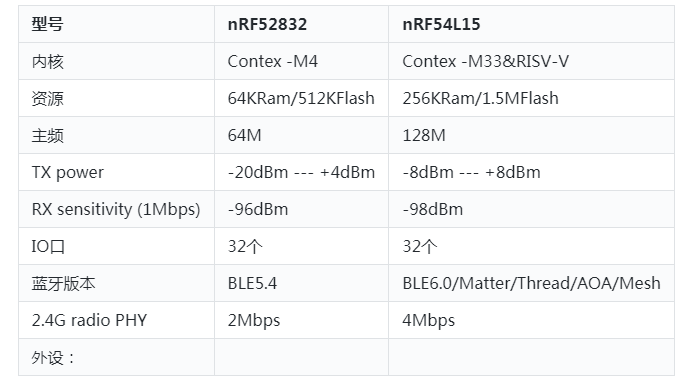
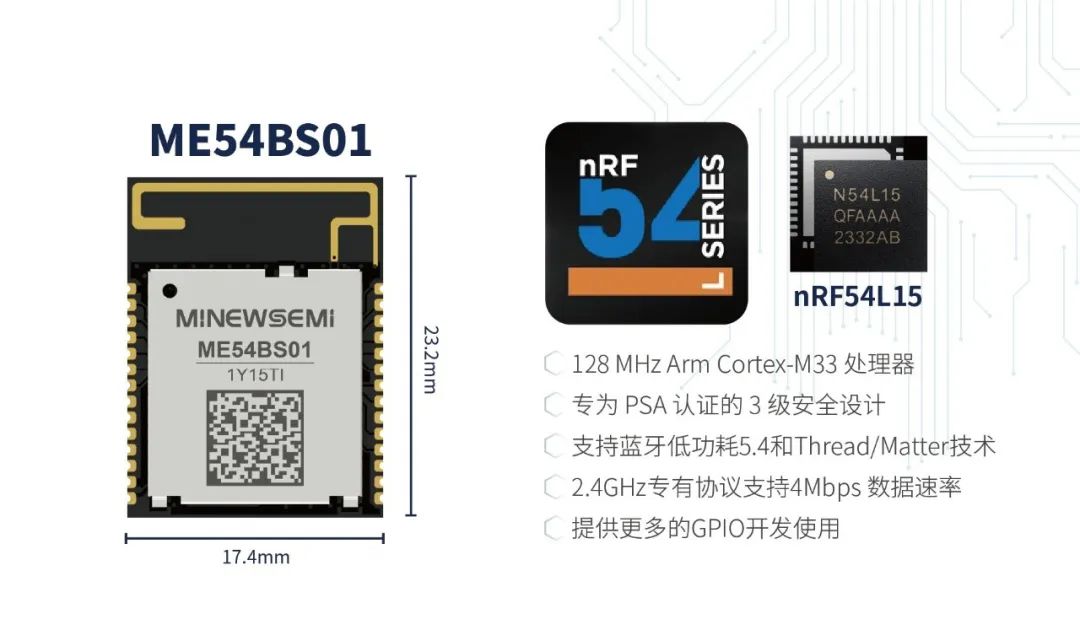
1、出色的處理能力和效率: nRF54L15 SoC 集成了運(yùn)行頻率為 128 MHz 的 Arm Cortex-M33 處理器,處理能力比 nRF52840 提高了一倍,同時(shí)降低了功耗。它擁有 1.5 MB 非易失性存儲(chǔ)器和 256 KB RAM,足以同時(shí)運(yùn)行多個(gè)無線協(xié)議。
2、高級(jí)安全性: nRF54L15 專為 PSA 認(rèn)證 3 級(jí)而設(shè)計(jì),這是 PSA 認(rèn)證物聯(lián)網(wǎng)安全標(biāo)準(zhǔn)的最高級(jí)別。它提供安全啟動(dòng)、安全固件更新和安全存儲(chǔ)等安全服務(wù)。集成的篡改傳感器可檢測(cè)攻擊并采取適當(dāng)措施,而加密加速器則可加固以抵御側(cè)信道攻擊。
3、一流的多協(xié)議無線電: 這款同類最佳的多協(xié)議射頻產(chǎn)品具有更高的穩(wěn)健性和更遠(yuǎn)的傳輸距離,對(duì)于 1 Mbps 藍(lán)牙低功耗,發(fā)射功率可達(dá) 8 dBm(步進(jìn)為 1 dB),接收靈敏度為 -98 dBm。該無線電包括用于 2.4 GHz 專有協(xié)議的全新 4 Mbps 數(shù)據(jù)速率選項(xiàng),吞吐量、效率和延遲均有所提高。它支持低功耗藍(lán)牙和所有藍(lán)牙 5.4 功能,并專為支持即將推出的藍(lán)牙規(guī)范而設(shè)計(jì)。此外,還支持藍(lán)牙網(wǎng)格、Thread 和 Matter 等協(xié)議。
這款同類最佳的多協(xié)議射頻產(chǎn)品具有更高的穩(wěn)健性和更遠(yuǎn)的傳輸距離,對(duì)于 1 Mbps 藍(lán)牙低功耗,發(fā)射功率可達(dá) 8 dBm(步進(jìn)為 1 dB),接收靈敏度為 -98 dBm。該無線電包括用于 2.4 GHz 專有協(xié)議的全新 4 Mbps 數(shù)據(jù)速率選項(xiàng),吞吐量、效率和延遲均有所提高。它支持低功耗藍(lán)牙和所有藍(lán)牙 5.4 功能,并專為支持即將推出的藍(lán)牙規(guī)范而設(shè)計(jì)。此外,還支持藍(lán)牙網(wǎng)格、Thread 和 Matter 等協(xié)議。
4、可延長電池壽命的新型 Global RTC 外圍設(shè)備: 新的全局 RTC 外設(shè)可以從最深的睡眠模式喚醒 SoC,從而無需外部 RTC,大大降低了長時(shí)間睡眠應(yīng)用的能耗,延長了電池壽命。
5、適用于尺寸受限設(shè)計(jì)的超緊湊型封裝: nRF54L15 現(xiàn)以 QFN 封裝提供樣品。它還將采用兩種超緊湊型 WLCSP 封裝。這些封裝將比nRF52840 小 50%,適用于有嚴(yán)格尺寸限制的設(shè)計(jì)。
6x6 mm QFN48 with 31 GPIOs
2.4x2.2 mm WLCSP with 32 GPIOs (300 um pitch)
2.4x2.2 mm WLCSP with 14 GPIOs (350 um pitch)
二、應(yīng)用場(chǎng)景:
電腦配件、游戲控制器和遙控器
虛擬現(xiàn)實(shí)和增強(qiáng)現(xiàn)實(shí)
智能家居和物質(zhì)
醫(yī)療設(shè)備
工業(yè)物聯(lián)網(wǎng)
審核編輯 黃宇
-
芯片
+關(guān)注
關(guān)注
459文章
52282瀏覽量
437474 -
藍(lán)牙低功耗
+關(guān)注
關(guān)注
0文章
32瀏覽量
9174
發(fā)布評(píng)論請(qǐng)先 登錄
Nordic最新開發(fā)工具nRF54L15 DK
深入比較nRF52832和Nordic新的產(chǎn)品nRF54L15參數(shù)對(duì)比
nRF52832 vs. nRF54L15:Nordic新一代藍(lán)牙芯片如何重新定義低功耗物聯(lián)網(wǎng)?

?nRF54L05/nrf54系列—超低功耗無線 SoC 支持4Mbps速率
超低功耗藍(lán)牙多協(xié)議模塊NRF54L15手冊(cè)
Nordic新產(chǎn)品nRF54L15和nRF52832參數(shù)對(duì)比
突破性能邊界,重塑物聯(lián)網(wǎng)未來——NRF54L15芯片全面解析
NRF54L15藍(lán)牙模組性能與場(chǎng)景應(yīng)用
深入比較nRF52832和Nordic新的產(chǎn)品nRF54L15參數(shù)對(duì)比
基于nRF54L15為核心的模組方案PTR5415
nRF54L15—藍(lán)牙低功耗雙核系統(tǒng)級(jí)芯片(SoC)
Nordic開發(fā)工具之NRF54L15-DK
nRF54L 系列SOC芯片NRF54L15 超低功耗藍(lán)牙5.4 SOC
旗艦新品 | 創(chuàng)新微MinewSemi推出基于Nordic nRF54系列芯片 SoC 低功耗藍(lán)牙5.4模組

創(chuàng)新微MinewSemi推出基于Nordic nRF54系列芯片 SoC 低功耗藍(lán)牙5.4模組





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論