") 無人機數(shù)據(jù)鏈抗干擾技術(shù)發(fā)展綜述
無人機數(shù)據(jù)鏈抗干擾技術(shù)發(fā)展綜述
無人機數(shù)據(jù)鏈承擔著無人機指揮控制和信息傳輸?shù)闹匾蝿?wù),是無人機系統(tǒng)的重要組成部分。近年來,無人機在軍事和民用領(lǐng)域的廣泛應(yīng)用對無人機數(shù)據(jù)鏈在復雜環(huán)境下的安全性、可靠性和適應(yīng)性提出了更高的要求。本文闡述了軍用和民用領(lǐng)域無人機數(shù)據(jù)鏈的發(fā)展現(xiàn)狀,總結(jié)了無人機數(shù)據(jù)鏈面臨的挑戰(zhàn)以及無人機數(shù)據(jù)鏈抗干擾的關(guān)鍵技術(shù)。
1、無人機數(shù)據(jù)鏈的發(fā)展歷程
由于在無人機早期發(fā)展過程中軍用無人機占據(jù)了主導地位,導致了不同國家、不同無人機平臺上使用的數(shù)據(jù)鏈類型各異,并且隨著無人機的發(fā)展,無人機數(shù)據(jù)鏈在使用的頻帶、調(diào)制方式上也進行了數(shù)次重要的改變。
1.1 視距數(shù)據(jù)鏈和超視距數(shù)據(jù)鏈
從無人機與指揮控制站之間的距離是否通視來分類,無人機數(shù)據(jù)鏈主要分為視距鏈路(RF-LOS)和超視距鏈路(BLOS)。
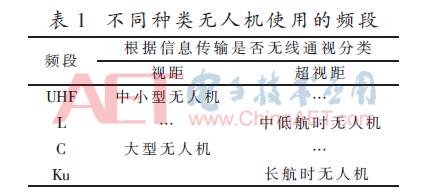
在視距鏈路類型中,不同的數(shù)據(jù)鏈使用了從低頻到C波段之間的不同頻率。而C波段(4 GHz~8GHz)因不易受到極端天氣的影響從而成為目前大多數(shù)無人機數(shù)據(jù)鏈采用的頻段,其中下行鏈路使用3.7~4.2GHz,上行鏈路使用5.9~6.4GHz。根據(jù)公開的文獻資料顯示,視距鏈路使用C波段的有水手無人機(Mariner)、捕食者無人機(Predator)和牽牛星無人機(Altair)等大型無人機。而一些小型無人機的視距鏈路則使用UHF波段(300~1000MHz),比如掃描鷹無人機(ScanEagle)、地球漫游者無人機(Georanger)、子午線無人機(Meridian)、陰影無人機(Shadow)和大烏鴉無人機(Raven)。
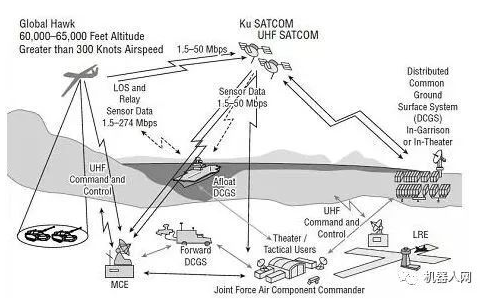
在超視距鏈路類型中,數(shù)據(jù)鏈使用的頻段包括UHF波段、L波段(950~1450MHz)和Ku波段(12MHz~18GHz)。以全球鷹無人機(Global Hawk)、廣域海上監(jiān)視無人機(BAMS)和捕食者無人機(Predator)為代表的長航時無人機使用Ku波段作為超視距鏈路,其中上行鏈路為11.7~12.7GHz,下行鏈路為14~14.5GHz。而中低航時的無人機的超視距鏈路一般使用L波段的衛(wèi)星通信鏈路。
不同無人機平臺視距鏈路和超視距鏈路使用的頻段總結(jié)如表1所示。
1.2 單載波數(shù)據(jù)鏈和多載波數(shù)據(jù)鏈
從數(shù)據(jù)鏈使用的調(diào)制方式來分,無人機數(shù)據(jù)鏈分為單載波傳輸數(shù)據(jù)鏈和多載波傳輸數(shù)據(jù)鏈。
單載波傳輸數(shù)據(jù)鏈的發(fā)展過程中最早出現(xiàn)的數(shù)據(jù)鏈系統(tǒng)是由美國航空無線電公司(ARINC)于1978年發(fā)展出來的通信尋址與報告系統(tǒng)(ACARS)。ACARS最早并至今仍用于有人駕駛飛行器與地面控制站的通信中,后來被應(yīng)用于無人機數(shù)據(jù)鏈系統(tǒng)。ACARS使用了幅度調(diào)制的模擬無線電信號并工作在高頻(HF)、甚高頻(VHF)和衛(wèi)星通信(SATCOM)頻段。在20個世紀90年代,ACARS數(shù)據(jù)鏈系統(tǒng)應(yīng)用了數(shù)字無線電并被稱為甚高頻數(shù)字鏈路(VDL)。VDL依次發(fā)展出了VDL1、VDL2、VDL3、VDL4四個版本,其中VDL1和VDL3并沒有投入實際使用,而VDL2用于飛行器和地面控制站之前的通信,而VDL4可以用于飛行器與飛行器之間的通信。由于VHF波段比較擁擠,所以基于VDL2和VDL4,工作在L波段的LDL2和LDL4在后來被學者提出。
1998年,休斯網(wǎng)絡(luò)系統(tǒng)公司基于全球移動通信系統(tǒng)(GSM)發(fā)展了一種擴展時分多址(E-TDMA)數(shù)據(jù)鏈系統(tǒng)。這個數(shù)據(jù)鏈系統(tǒng)的關(guān)鍵技術(shù)是使用專用和請求式時隙的多個服務(wù)質(zhì)量等級的應(yīng)用,而這一關(guān)鍵技術(shù)被應(yīng)用于采用時分復用(TDD)技術(shù)的通用多信道航空通信系統(tǒng)(AMACS)和由歐洲空域航行安全組織(EUROCONTROL)提出的基于L波段的1型數(shù)字航空系統(tǒng)(L-DACS1)。
第三個單載波傳輸數(shù)據(jù)鏈系統(tǒng)是于2002年提出的通用接入收發(fā)系統(tǒng)(UAT),UAT工作在978MHz頻段并使用一個3MHz的信道提供峰值速率為1MHz的服務(wù)。UAT同樣是一個TDMA系統(tǒng)。
第一個多載波傳輸數(shù)據(jù)鏈系統(tǒng)是由歐洲第六框架工作組(EP6)提出的寬帶甚高頻(B-VHF)系統(tǒng),該系統(tǒng)工作在118~137MHz的甚高頻頻段并使用多載波碼分多址(MC-CDMA)、TDD和正交頻分多路復用(OFDM)技術(shù),其中每個子載波的間隔是2 kHz。因為VHF頻段比較擁擠,所以學者基于B-VHF發(fā)展了工作于L波段的寬帶航空多載波(B-AMC)系統(tǒng),B-AMC摒棄了CDMA技術(shù)而保留了OFDM技術(shù),而考慮工作頻率的增加使多普勒頻移的增加,每個子載波的間隔擴展為10 kHz,且考慮到系統(tǒng)容量,B-AMC使用了應(yīng)用頻分復用(FDD)技術(shù)的兩個信道。
第二個多載波傳輸數(shù)據(jù)鏈是由電子工業(yè)協(xié)會(EIA)和通信工業(yè)協(xié)會(TIA)提出的用于公共安全無線電系統(tǒng)的P34。P34覆蓋了187.5 km的扇形區(qū)域并應(yīng)用了OFDM技術(shù)。
由EUROCONTROL提出的基于L波段的2型數(shù)字航空系統(tǒng)(L-DACS2)是以前兩種多載波傳輸數(shù)據(jù)鏈系統(tǒng)所采用的技術(shù)和WiMAX為基礎(chǔ)、應(yīng)用OFDM技術(shù)的第三種多載波傳輸數(shù)據(jù)鏈。
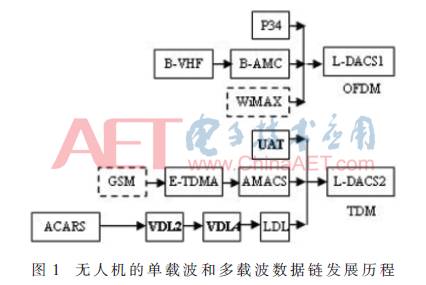
文獻[5]總結(jié)了用于無人機的單載波和多載波數(shù)據(jù)鏈的發(fā)展歷程,如圖1所示。
2、無人機數(shù)據(jù)鏈抗干擾面臨的挑戰(zhàn)
設(shè)計無人機數(shù)據(jù)鏈要比設(shè)計其他無線通信系統(tǒng)更為復雜,在抗干擾方面無人機面臨的挑戰(zhàn)有信息遠距離傳輸帶來的路徑損耗、傳播途徑中的障礙物造成的衰落、無人機的高速運動帶來的多普勒頻移、復雜的頻譜環(huán)境帶來的干擾和阻塞。
2.1 鏈路遠距離路徑損耗
無人機數(shù)據(jù)鏈系統(tǒng)所面臨的最嚴峻的挑戰(zhàn)是信息長距離的傳輸,長距離的傳輸會給數(shù)據(jù)鏈系統(tǒng)的性能帶來以下幾方面的挑戰(zhàn):
(1)功率衰減和頻譜效率的降低。IEEE802.11無線傳輸鏈路也就是俗稱的WiFi只能覆蓋100m范圍,而后來發(fā)展的IEEE802.16也就是俗稱的WiMAX在鄉(xiāng)村地區(qū)可以覆蓋3km而在城市地區(qū)可以覆蓋1km,以上的覆蓋范圍同樣適用于3GPP LTE。一般的航空數(shù)據(jù)鏈路要求覆蓋360km的范圍,所以使用這些傳統(tǒng)的無線通信鏈路來實施長距離的測控和傳輸會造成嚴重的功率衰減和極低的頻譜效率。文獻[8]顯示,WiMAX網(wǎng)絡(luò)可以在0.9km的范圍里實現(xiàn)3bps~5bps/Hz的頻譜效率。對于遠距離傳輸而言,頻譜效率將會更低。
(2)傳輸延遲。信息遠距離的傳輸還會造成嚴重的來回傳輸時間的延遲而使通信保護時隙大大增加。相比于WiMAX網(wǎng)絡(luò)在5km范圍內(nèi)17μs的延遲最低要求,電磁波單向傳輸360km則需要1.2ms。
(3)此外,信息的長距離傳輸會增加系統(tǒng)誤碼率、減少接收機信噪比、增加數(shù)據(jù)包的丟失概率。
2.2 無人機平臺的高速運動
無人機的高速運動可以給接收機帶來多普勒頻移,而多普勒頻移的大小和運動速度成正比而和波長成反比。可以計算出L-DACS1在速率為600km/h以及工作頻段為1164MHz時的多普勒頻移為1213Hz,而WiMAX在速率為100km/h以及工作頻段為2.5GHz時的多普勒頻移為231.5Hz。因為電磁波頻率和波長成反比,因此對于高速運動狀態(tài)的無人機而言,工作頻段越低多普勒頻移越小,但是低頻段的頻譜資源又非常緊張,所以無人機的高速運動帶來的多普勒頻移對無人機數(shù)據(jù)鏈來說是一個很大的挑戰(zhàn)。
2.3 鏈路中障礙物引起的衰落
無人機數(shù)據(jù)鏈應(yīng)用的主要頻段為微波(300MHz~3000GHz),因為微波鏈路有更高的可用帶寬,但是微波頻率高、波長很短,沒有繞射功能。鏈路的這種特點會給通信造成以下挑戰(zhàn):
(1)陰影衰落。無人機數(shù)據(jù)鏈在通信過程中遇到的障礙物可以部分或者全部地阻擋信號的傳輸而造成嚴重的陰影衰落。
(2)多徑衰落。從更小的尺度上,由于電磁波通過障礙物時的散射和反射而造成的接收機接收到來自不同路徑的同一信號的不同副本的相位不同,由此造成無線信號多徑衰落。由于無人機數(shù)據(jù)鏈在動態(tài)變化,副本間的相位差也在動態(tài)變化,所以無法使用傳統(tǒng)靜態(tài)無線通信中加入一個衰落開銷的方式來消除多徑衰落。
(3)此外,多徑衰落會造成嚴重的碼間干擾。
2.4 人為非惡意干擾和惡意干擾
非惡意干擾是指頻譜環(huán)境中存在的其他設(shè)備的無線電信號對無人機數(shù)據(jù)鏈產(chǎn)生的干擾,而惡意干擾主要存在于軍用領(lǐng)域中,主要分壓制式干擾和欺騙式干擾。
(1)壓制式干擾是指干擾機持續(xù)發(fā)射的干擾信號功率大于無人機數(shù)據(jù)鏈的信號功率,使數(shù)據(jù)鏈中的通信節(jié)點不能正確接收射頻信號,導致通信鏈路中斷的一種人為通信干擾。壓制式干擾類型按干擾信號的形式通常可以分為三類:單頻干擾、窄帶干擾和寬帶干擾。由于壓制式干擾從功率上淹沒期望信號,或者阻塞射頻前端,因此其調(diào)制信息無關(guān)緊要。
(2)而欺騙式干擾采用跟無人機數(shù)據(jù)鏈信號結(jié)構(gòu)相似的信號作為欺騙信號,因此可以不被察覺地誘導接收機捕獲跟蹤欺騙信號,從而達到降低其抗干擾性能的目的,并可采用與數(shù)據(jù)鏈信號近似的功率,避免因功率過大被檢測出來以及降低干擾成本。實際應(yīng)用中,如軍事領(lǐng)域接收機常常面臨高動態(tài)、弱信號、強干擾或信號遮擋等復雜多變的環(huán)境,這時接收機會失鎖轉(zhuǎn)而捕獲欺騙信號或者跟蹤中受到欺騙信號的影響增大從而整個系統(tǒng)受到影響。
2.5 擁擠的頻譜環(huán)境
頻譜資源緊缺,不可避免地受到外部干擾信號威脅。傳統(tǒng)的無人機數(shù)據(jù)鏈使用HF、VHF頻段和SATCOM頻段,但是SATCOM頻段不能保證每個數(shù)據(jù)傳輸階段都可以使用,而HF和VHF變得越來越擁擠。在國內(nèi),根據(jù)工業(yè)和信息化部頒布的無人駕駛航空器頻率使用要求,可使用頻段:840.5~845MHz、1430~1444MHz和2408~2440MHz,頻譜資源緊缺,不可避免地受到外部干擾信號威脅。
3、無人機數(shù)據(jù)鏈抗干擾的關(guān)鍵技術(shù)
無人機數(shù)據(jù)鏈面臨的挑戰(zhàn)要求無人機數(shù)據(jù)鏈具備以下能力:
(1)廣泛的頻譜管理、分配能力:可以在任意區(qū)域、任意時間對無人機動態(tài)分配可用的頻譜資源。
(2)解決因信息長距離傳輸而造成的功率大規(guī)模衰減的能力。
(3)避開并避免非惡意干擾的能力。
(4)抵抗惡意干擾的能力。
本節(jié)總結(jié)了文獻中無人機數(shù)據(jù)鏈在面臨以上諸多挑戰(zhàn)和需求時可用的抗干擾技術(shù)的研究。研究應(yīng)用于無人機數(shù)據(jù)鏈的抗干擾技術(shù)主要分為三類:提高系統(tǒng)可靠性和有效性的相關(guān)技術(shù)、基于協(xié)作通信技術(shù)以及基于認知無線電的抗干擾技術(shù)。
3.1 提高通信可靠性和有效性的無人機數(shù)據(jù)鏈相關(guān)抗干擾技術(shù)
這些相關(guān)技術(shù)包括多輸入多輸出(MIMO)系統(tǒng)的性能評估[9-10],信息傳輸策略[11-12],以及蜂窩系統(tǒng)和其他無線通信系統(tǒng)的使用[13-14]。集中于物理層和鏈路層的技術(shù)研究重點有:
(1)低功耗MIMO系統(tǒng)的集成。
(2)以擴頻和跳頻技術(shù)為代表的抗干擾技術(shù)的研究和使用。
(3)有限頻譜資源限制下,高吞吐量、高可靠性的物理層和MAC層協(xié)議和策略。
(4)無人機數(shù)據(jù)鏈系統(tǒng)和衛(wèi)星通信系統(tǒng)以及其他無線通信系統(tǒng)的整合。
3.2 基于協(xié)作通信的無人機數(shù)據(jù)鏈抗干擾技術(shù)
文獻[15]提出了多信源條件下的協(xié)作通信方式,仿真結(jié)果表明該方案減小了接收信號的誤碼率;在動態(tài)傳輸速率條件下,該方案的傳輸可靠性更高。多信源協(xié)同通信的研究為UAV數(shù)據(jù)鏈的多鏈路協(xié)同信息傳輸指明了方向。文獻[15]、[16]在協(xié)同通信的基礎(chǔ)上提出了異步協(xié)同信息傳輸?shù)姆绞剑謩e從物理層(構(gòu)建三維空間的異步協(xié)作傳輸模式)和鏈路層(通過多鏈路協(xié)同轉(zhuǎn)發(fā)協(xié)議)來增強信息傳輸?shù)目煽啃浴G罢咴谖锢韺映浞掷萌N空間分集技術(shù),提高了分集增益,使抗干擾能力有了大幅度的提升;后者在鏈路層通過單發(fā)多收和基于隨機同步競爭窗的自舉應(yīng)答算法來消除鏈路短時變化的影響,獲得了更佳的網(wǎng)絡(luò)抵達率和能量效率,增強了傳輸可靠性,提高了抗干擾能力。文獻[17]提出了一種在因接收機和發(fā)射機相對運動或者環(huán)境變化較快時產(chǎn)生的過時信道狀態(tài)信息下協(xié)作通信中繼選擇方法,選擇最優(yōu)的中繼可以在一定程度上抵抗對協(xié)作通信系統(tǒng)的干擾。文獻[18]提出了一種基于MAP準則的信道狀態(tài)信息預測技術(shù)來提升協(xié)作通信系統(tǒng)的抗干擾能力。
3.3 基于認知無線電的無人機數(shù)據(jù)鏈抗干擾技術(shù)
另外,為了解決頻譜資源短缺和隨著無人機廣泛使用用戶頻譜管理難度增加的問題,應(yīng)用于無人機頻譜感知和系統(tǒng)重構(gòu)的認知無線電技術(shù)被研究。文獻[19]針對無人機數(shù)據(jù)鏈在地理環(huán)境、氣象環(huán)境、電磁環(huán)境等構(gòu)成的復雜環(huán)境中受干擾程度提出一種結(jié)合支持向量機與功率準則的預測評估方法,預測的結(jié)果可用于無人機數(shù)據(jù)鏈的重構(gòu)。文獻[4]提出了一種基于認知無線電技術(shù)的無人機數(shù)據(jù)鏈通信系統(tǒng),作者設(shè)計了一個認知引擎,將信噪比、信道估計結(jié)果、頻譜感知結(jié)果、多普勒頻移等作為輸入,通過設(shè)計的認知引擎,輸出無人機系統(tǒng)重構(gòu)后的通信參數(shù)以及由輸入判斷系統(tǒng)遭遇的情況種類。文獻[20]分析當前無人機數(shù)據(jù)鏈面臨問題的基礎(chǔ)上,提出了基于認知無線電的無人機智能數(shù)據(jù)鏈的概念及其內(nèi)涵,描述了無人機智能數(shù)據(jù)鏈的工作過程,給出了無人機智能數(shù)據(jù)鏈的指標體系以及功能分級。在確定無人機數(shù)據(jù)鏈功能的基礎(chǔ)上,提出了無人機智能數(shù)據(jù)鏈的體系結(jié)構(gòu)。文獻[21]提出了一種基于狀態(tài)機的無人機數(shù)據(jù)鏈多參數(shù)規(guī)劃方法,該方法為無人機數(shù)據(jù)鏈重構(gòu)提供了一種可行有效的思路。
4、結(jié)論
隨著無人機在各領(lǐng)域越來越廣泛的應(yīng)用,無人機數(shù)據(jù)鏈面臨著諸如頻譜資源緊張、頻譜環(huán)境復雜、容易受到環(huán)境干擾和人為干擾影響等挑戰(zhàn)。傳統(tǒng)的擴頻通信無法滿足無人機通信鏈路可靠性的要求,因此,需要更靈活、適應(yīng)能力更強的抗干擾方法來提高無人機抗干擾能力,保證通信鏈路質(zhì)量。目前,在物理層和鏈路層提高系統(tǒng)容量和魯棒性的各種抗干擾技術(shù),協(xié)作通信技術(shù)以及認知無線電技術(shù)被研究、并逐步應(yīng)用于無人機數(shù)據(jù)鏈,利用感知頻譜環(huán)境并進行系統(tǒng)重構(gòu)的技術(shù)將是無人機數(shù)據(jù)鏈智能抗干擾的主要發(fā)展方向。
審核編輯 :李倩
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7246瀏覽量
91195 -
衛(wèi)星通信
+關(guān)注
關(guān)注
12文章
756瀏覽量
39228 -
無人機
+關(guān)注
關(guān)注
230文章
10757瀏覽量
185742
原文標題:無人機數(shù)據(jù)鏈抗干擾技術(shù)發(fā)展綜述
文章出處:【微信號:雨飛工作室,微信公眾號:雨飛工作室】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
第二集 知語云智能科技無人機反制技術(shù)與應(yīng)用--無人機的發(fā)展歷程
復雜電磁環(huán)境下無人機通信抗干擾問題研究
艦載無人機測控系統(tǒng)關(guān)鍵技術(shù)研究
2015年無人機技術(shù)大盤點
航模/無人機遙控的解決方案
各類反無人機技術(shù)的優(yōu)勢
反無人機技術(shù)的研發(fā),無人機反制設(shè)備成為熱門產(chǎn)品
小型無人機數(shù)據(jù)鏈與自主飛控系統(tǒng)設(shè)計
無人機無線電數(shù)據(jù)鏈自動測試系統(tǒng)方案設(shè)計
LDPC碼在COFDM無人機數(shù)據(jù)鏈中的性能仿真
無人機數(shù)據(jù)鏈發(fā)展歷程,抗干擾技術(shù)所面臨的挑戰(zhàn)
無人機的四大關(guān)鍵系統(tǒng)是哪四大
無人機四大系統(tǒng)是干什么的





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論