") 適用于激光SLAM的點(diǎn)云全局特征描述子回環(huán)檢測(cè)方案
適用于激光SLAM的點(diǎn)云全局特征描述子回環(huán)檢測(cè)方案
作者:韓超,陳敏,黃宇昊,趙明輝,杜乾坤,梁慶華
同步定位和建圖(SLAM)是實(shí)現(xiàn)機(jī)器人在未知環(huán)境下的定位和移動(dòng)的重要技術(shù)方法[1]。定位精度是井下巡檢的核心指標(biāo),高精度的定位算法是巡檢過(guò)程中導(dǎo)航和避障的基礎(chǔ)。但井下環(huán)境復(fù)雜,具有低照度、弱紋理、圖像特征難以識(shí)別的特點(diǎn)[2],給基于視覺(jué)的SLAM算法帶來(lái)了極大的困難。而激光SLAM算法測(cè)量距離遠(yuǎn)、精度高,利用環(huán)境的結(jié)構(gòu)特征進(jìn)行定位[3],在井下環(huán)境中更具應(yīng)用前景[4-5]。
目前,SLAM算法通過(guò)估計(jì)的相鄰幀之間的位姿變換不斷疊加進(jìn)行位姿信息計(jì)算,隨著巡檢時(shí)間的增加,每次位姿估計(jì)中的偏差不斷累積形成較大的累積誤差,制約了算法的定位精度。
利用圖像語(yǔ)義信息豐富的特點(diǎn),視覺(jué)SLAM算法如ORB-SLAM[6]、VINS[7]等,多使用基于詞袋模型[8]的回環(huán)檢測(cè)方法,利用預(yù)先訓(xùn)練的視覺(jué)特征單詞構(gòu)建詞典,將圖像中的特征描述為一個(gè)單詞,圖像中單詞種類和數(shù)量構(gòu)成圖像的詞袋向量,通過(guò)詞袋向量之間的相似度進(jìn)行回環(huán)檢測(cè)。
但激光雷達(dá)分辨率低,傳遞信息不如圖像豐富,基于詞袋模型的回環(huán)檢測(cè)方法難以應(yīng)用。在LeGO-LOAM[9]和LIO-SAM[10]等激光SLAM方案中使用基于里程計(jì)的回環(huán)檢測(cè)方法,通過(guò)當(dāng)前位置信息判斷是否可能存在回環(huán),如當(dāng)前位置一定范圍內(nèi),存在歷史軌跡點(diǎn),則與對(duì)應(yīng)關(guān)鍵幀進(jìn)行匹配,并通過(guò)迭代最近點(diǎn)(ICP)配準(zhǔn)方法進(jìn)行位姿計(jì)算,實(shí)現(xiàn)累計(jì)誤差的校正。此類方法效果受巡檢距離限制,當(dāng)累積誤差超過(guò)一定范圍時(shí)出現(xiàn)無(wú)法檢測(cè)到回環(huán)或錯(cuò)誤檢測(cè)的問(wèn)題,仍未解決累積誤差不斷增長(zhǎng)的問(wèn)題,受傳感器精度影響大,且ICP方法對(duì)全部點(diǎn)云進(jìn)行配準(zhǔn)計(jì)算,計(jì)算時(shí)間較長(zhǎng)。
文獻(xiàn)[11-12]通過(guò)正態(tài)分布變換(NDT)或特征直方圖檢測(cè)閉環(huán),通過(guò)距離信息判定當(dāng)前位置閾值與歷史軌跡的一致性,使用NDT方法或特征直方圖方法進(jìn)行位姿估計(jì)與二次回環(huán)檢測(cè),有效提升了匹配準(zhǔn)確率,但召回率以及回環(huán)檢測(cè)的實(shí)時(shí)性無(wú)法適用于井下無(wú)人機(jī)的定位需求。因此,使用回環(huán)檢測(cè)方法解決井下無(wú)人機(jī)巡檢保持長(zhǎng)時(shí)間高精度定位的問(wèn)題,需避免對(duì)里程計(jì)的依賴,使用場(chǎng)景相似特征進(jìn)行回環(huán)檢測(cè),同時(shí)提高計(jì)算效率,保證實(shí)時(shí)性。
本文提出一種適用于激光SLAM的點(diǎn)云全局特征描述子回環(huán)檢測(cè)方案,不依賴于位姿信息,利用礦井通道的幾何結(jié)構(gòu)特征進(jìn)行匹配,通過(guò)計(jì)算與誤差較小的歷史場(chǎng)景之間的位姿變換,消除累積誤差,并完成了完整SLAM算法框架的搭建,實(shí)時(shí)性好。該框架里程計(jì)部分基于激光里程計(jì)和建圖(LOAM)[13]算法計(jì)算不帶回環(huán)的位姿信息,回環(huán)檢測(cè)部分基于曲率劃分的特征點(diǎn)與點(diǎn)云質(zhì)心之間的角度關(guān)系和尺度關(guān)系進(jìn)行相似度檢測(cè),使用平面點(diǎn)和邊角點(diǎn)配準(zhǔn)方法優(yōu)化計(jì)算速度,并由因子圖優(yōu)化方法保證全局一致性。最終,通過(guò)仿真和開(kāi)源數(shù)據(jù)集實(shí)驗(yàn)驗(yàn)證了所提算法的有效性,本文研究可為激光SLAM的全局特征提取及回環(huán)算法提供理論基礎(chǔ)。
01 基于全局特征描述子的回環(huán)檢測(cè)
設(shè)計(jì)的定位系統(tǒng)整體分為2個(gè)模塊:里程計(jì)模塊和回環(huán)檢測(cè)模塊。
里程計(jì)模塊參考LOAM算法[13]實(shí)現(xiàn),輸出里程計(jì)位姿信息,并根據(jù)點(diǎn)云三維曲率完成了特征點(diǎn)云的篩選,將邊角特征點(diǎn)云 和平面特征點(diǎn)云
和平面特征點(diǎn)云 傳遞給回環(huán)檢測(cè)模塊。
傳遞給回環(huán)檢測(cè)模塊。
回環(huán)檢測(cè)模塊中進(jìn)行回環(huán)識(shí)別和位姿的更新。為實(shí)現(xiàn)對(duì)井下通道的幾何描述,在激光雷達(dá)相對(duì)坐標(biāo)系下,進(jìn)行特征向量提取和中心點(diǎn)計(jì)算,基于點(diǎn)云的角度分布和尺度分布關(guān)系,構(gòu)建點(diǎn)云的全局特征描述子;以多維描述子之間的相關(guān)性作為點(diǎn)云相似度的評(píng)價(jià)指標(biāo);使用特征點(diǎn)配準(zhǔn)方法以改進(jìn)全局配準(zhǔn)計(jì)算耗時(shí)過(guò)大的問(wèn)題;利用檢測(cè)到的相似場(chǎng)景建立回環(huán)約束,通過(guò)因子圖優(yōu)化消除累積誤差并保證軌跡和地圖的全局一致性。回環(huán)檢測(cè)模塊是本文研究的重點(diǎn),算法流程框圖如圖1所示。其中: 和
和 分別為邊角特征點(diǎn)云和平面特征點(diǎn)云對(duì)應(yīng)的特征向量;
分別為邊角特征點(diǎn)云和平面特征點(diǎn)云對(duì)應(yīng)的特征向量; 為關(guān)鍵幀
為關(guān)鍵幀 的全局描述子向量;
的全局描述子向量; 和
和 分別為關(guān)鍵幀的邊角特征和平面特征。
分別為關(guān)鍵幀的邊角特征和平面特征。
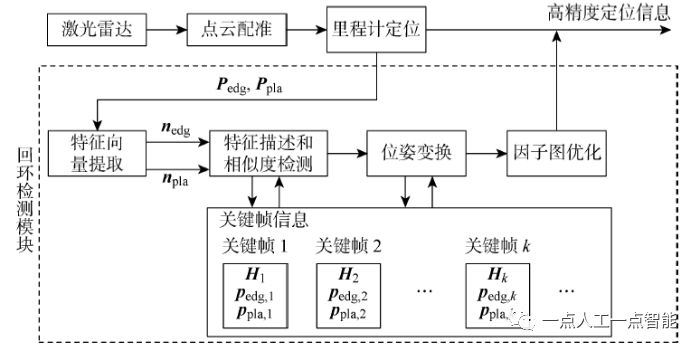
圖1 基于全局特征描述子的回環(huán)檢測(cè)算法流程
1.1 特征向量提取
使用全局點(diǎn)云中具有代表性信息的邊角特征和平面特征進(jìn)行數(shù)據(jù)處理,對(duì)里程計(jì)模塊中提取的邊角特征點(diǎn)云 和平面特征點(diǎn)云
和平面特征點(diǎn)云 分別提取特征向量。取
分別提取特征向量。取 或
或 中的任意一點(diǎn)
中的任意一點(diǎn) ,使用-維(KD)樹(shù)搜索其所在點(diǎn)云中鄰近的個(gè)點(diǎn),計(jì)算該部分點(diǎn)云的協(xié)方差矩陣,具體步驟如下。
,使用-維(KD)樹(shù)搜索其所在點(diǎn)云中鄰近的個(gè)點(diǎn),計(jì)算該部分點(diǎn)云的協(xié)方差矩陣,具體步驟如下。
步驟1 計(jì)算鄰近點(diǎn)的質(zhì)心:

步驟2 計(jì)算協(xié)方差矩陣 ,即質(zhì)心
,即質(zhì)心 到鄰近點(diǎn)云中所有點(diǎn)的向量與其轉(zhuǎn)置的內(nèi)積:
到鄰近點(diǎn)云中所有點(diǎn)的向量與其轉(zhuǎn)置的內(nèi)積:

步驟3 對(duì)協(xié)方差矩陣進(jìn)行奇異值分解(SVD),求特征值:
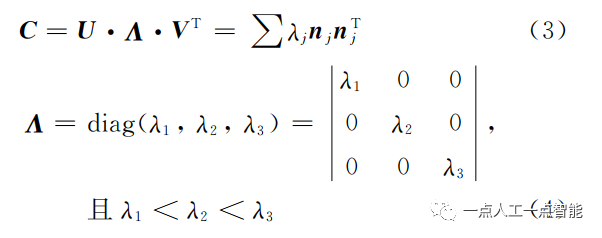
式中: 為矩陣對(duì)應(yīng)的特征值;為矩陣對(duì)應(yīng)的特征向量;
為矩陣對(duì)應(yīng)的特征值;為矩陣對(duì)應(yīng)的特征向量; 為對(duì)角線
為對(duì)角線 組成的對(duì)角矩陣;
組成的對(duì)角矩陣; 為奇異值分解后的實(shí)正交矩陣。
為奇異值分解后的實(shí)正交矩陣。
步驟4 由 解得對(duì)應(yīng)的特征向量
解得對(duì)應(yīng)的特征向量 。
。
其中,邊角特征提取線向量為特征向量 ,鄰近點(diǎn)投影至該方向上的向量方差最最小,為最大特征值
,鄰近點(diǎn)投影至該方向上的向量方差最最小,為最大特征值 對(duì)應(yīng)的特征向量
對(duì)應(yīng)的特征向量 ;平面特征提取法向量為特征向量
;平面特征提取法向量為特征向量 ,鄰近點(diǎn)投影至該方向上的向量方差最最大,為最小特征值λ1對(duì)應(yīng)的特征向量
,鄰近點(diǎn)投影至該方向上的向量方差最最大,為最小特征值λ1對(duì)應(yīng)的特征向量 [14]。
[14]。
1.2 特征描述和相似度計(jì)算
設(shè)計(jì)全局特征描述子的計(jì)算方法。通過(guò)計(jì)算全局點(diǎn)云 中所有點(diǎn)的三維坐標(biāo)平均值得到當(dāng)前幀的點(diǎn)云質(zhì)心
中所有點(diǎn)的三維坐標(biāo)平均值得到當(dāng)前幀的點(diǎn)云質(zhì)心 ,以點(diǎn)云
,以點(diǎn)云 和
和 中所有點(diǎn)對(duì)應(yīng)的特征向量的均值作為質(zhì)心處對(duì)應(yīng)的特征向量
中所有點(diǎn)對(duì)應(yīng)的特征向量的均值作為質(zhì)心處對(duì)應(yīng)的特征向量 ,進(jìn)而計(jì)算點(diǎn)云的全局特征描述子,邊角點(diǎn)云和平面點(diǎn)云分開(kāi)計(jì)算。
,進(jìn)而計(jì)算點(diǎn)云的全局特征描述子,邊角點(diǎn)云和平面點(diǎn)云分開(kāi)計(jì)算。
遍歷點(diǎn)云 中的所有點(diǎn),確定以質(zhì)心為原點(diǎn)
中的所有點(diǎn),確定以質(zhì)心為原點(diǎn) 的參考坐標(biāo)系
的參考坐標(biāo)系 :
:
式中: 為點(diǎn)云
為點(diǎn)云 或
或 中任意選取的一點(diǎn);為點(diǎn)云質(zhì)心處的歸一化特征向量;
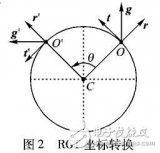
中任意選取的一點(diǎn);為點(diǎn)云質(zhì)心處的歸一化特征向量;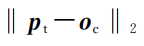 為點(diǎn)到質(zhì)心之間的歐氏距離。以, 確定的坐標(biāo)系如圖2所示,其中:
為點(diǎn)到質(zhì)心之間的歐氏距離。以, 確定的坐標(biāo)系如圖2所示,其中: 為點(diǎn)處歸一化之后的特征向量。
為點(diǎn)處歸一化之后的特征向量。
圖2 全局點(diǎn)云下的uvw坐標(biāo)系
以上述計(jì)算得到的坐標(biāo)系為基準(zhǔn),計(jì)算點(diǎn)云特征向量相對(duì)于基準(zhǔn)坐標(biāo)系3個(gè)坐標(biāo)軸的角度分布,則有:

式中: 為點(diǎn),之間的歐氏距離;
為點(diǎn),之間的歐氏距離; 為特征向量與坐標(biāo)軸v之間的夾角,值域?yàn)閇-1,1];
為特征向量與坐標(biāo)軸v之間的夾角,值域?yàn)閇-1,1]; 為,之間連線方向與坐標(biāo)軸
為,之間連線方向與坐標(biāo)軸 之間的夾角,值域?yàn)閇-1,1];
之間的夾角,值域?yàn)閇-1,1]; 為特征向量投影至
為特征向量投影至 平面時(shí)與坐標(biāo)軸
平面時(shí)與坐標(biāo)軸 之間的夾角,值域?yàn)閇?π/2,π/2]。
之間的夾角,值域?yàn)閇?π/2,π/2]。
利用上述公式進(jìn)行計(jì)算后,,, ,為非線性相關(guān)的,可以替代兩點(diǎn)的(x,y,z,
,為非線性相關(guān)的,可以替代兩點(diǎn)的(x,y,z, ,
, ,
, )共12維數(shù)據(jù)對(duì)點(diǎn)云的分布進(jìn)行幾何關(guān)系描述。
)共12維數(shù)據(jù)對(duì)點(diǎn)云的分布進(jìn)行幾何關(guān)系描述。
遍歷點(diǎn)云和中所有點(diǎn),與質(zhì)心點(diǎn)構(gòu)成點(diǎn)對(duì),計(jì)算對(duì)應(yīng)的,,,d四要素。將,,的值域區(qū)間進(jìn)行等分,統(tǒng)計(jì)全局點(diǎn)云三要素在各區(qū)間內(nèi)的分布情況,構(gòu)成特征描述子的角度分量。
計(jì)算全局點(diǎn)云中距離質(zhì)心點(diǎn)最遠(yuǎn)的位置,將最大距離均分為多個(gè)區(qū)間,統(tǒng)計(jì)各個(gè)點(diǎn)相對(duì)于質(zhì)心距離在區(qū)間中的分布,以此構(gòu)成特征描述子的尺度分量。
最終設(shè)計(jì)的點(diǎn)云全局描述特征描述子為230維向量,其中前105維為邊角特征點(diǎn)云計(jì)算得到的角度分量 ,
, ,
, ,中間105維數(shù)據(jù)為平面特征點(diǎn)云計(jì)算得到的角度分量
,中間105維數(shù)據(jù)為平面特征點(diǎn)云計(jì)算得到的角度分量 ,
, ,
, ,均以35維的向量表示,最后20維數(shù)據(jù)為當(dāng)前幀點(diǎn)云
,均以35維的向量表示,最后20維數(shù)據(jù)為當(dāng)前幀點(diǎn)云 全部點(diǎn)的尺度分量
全部點(diǎn)的尺度分量 。
。
本文提出的全局描述子計(jì)算方法以點(diǎn)云中心建立相對(duì)坐標(biāo)系進(jìn)行計(jì)算,具有旋轉(zhuǎn)不變性和平移不變性,如圖3所示。圖3(a)為原始點(diǎn)云及其旋轉(zhuǎn)45°、平移10 m后的點(diǎn)云,經(jīng)旋轉(zhuǎn)和平移變換后,如圖3(b)和3(c)所示,點(diǎn)云的全局特征描述子不發(fā)生變化。其中: 為描述子
為描述子 的維度信息;
的維度信息; 為對(duì)應(yīng)維度的數(shù)值信息。旋轉(zhuǎn)不變性和平移不變性說(shuō)明,對(duì)于同一場(chǎng)景下,激光雷達(dá)傳感器處于不同角度和位置時(shí),仍能進(jìn)行準(zhǔn)確地進(jìn)行回環(huán)檢測(cè)。
為對(duì)應(yīng)維度的數(shù)值信息。旋轉(zhuǎn)不變性和平移不變性說(shuō)明,對(duì)于同一場(chǎng)景下,激光雷達(dá)傳感器處于不同角度和位置時(shí),仍能進(jìn)行準(zhǔn)確地進(jìn)行回環(huán)檢測(cè)。
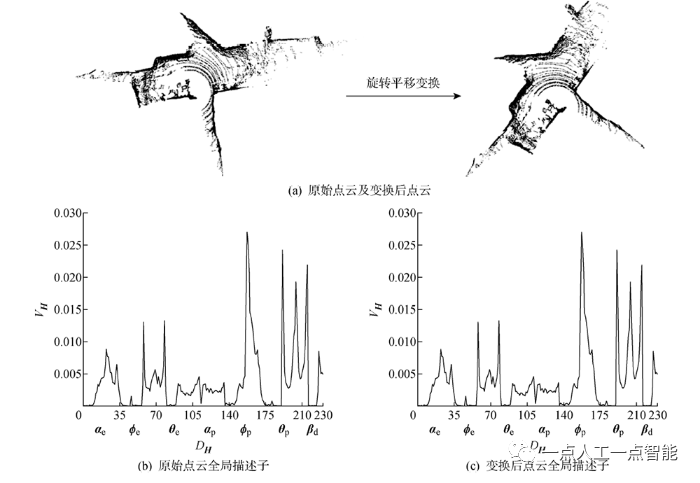
圖3 旋轉(zhuǎn)和平移不變性實(shí)驗(yàn)
使用點(diǎn)云全局特征描述子的皮爾遜相關(guān)系數(shù)[15]作為衡量點(diǎn)云相似度的標(biāo)準(zhǔn),其計(jì)算公式如下:
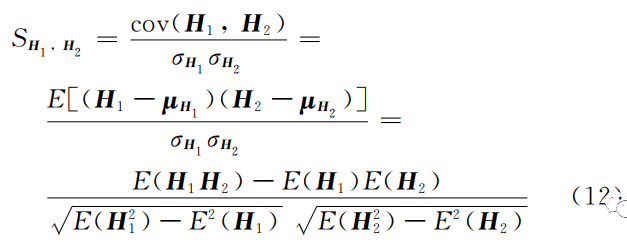
式中: ,
,

為歸一化后的點(diǎn)云全局特征描述子; 和
和 分別為
分別為 和
和 元素的平均值向量;
元素的平均值向量; 為數(shù)學(xué)期望;
為數(shù)學(xué)期望; 為方差;
為方差; 為相關(guān)系數(shù),其取值范圍為[0, 1]。當(dāng)接近于1時(shí),說(shuō)明特征描述子為正相關(guān)關(guān)系,點(diǎn)云的相似度越高[16]。
為相關(guān)系數(shù),其取值范圍為[0, 1]。當(dāng)接近于1時(shí),說(shuō)明特征描述子為正相關(guān)關(guān)系,點(diǎn)云的相似度越高[16]。
1.3 位姿變換
對(duì)篩選后相似度大于閾值的當(dāng)前幀點(diǎn)云 和歷史相似幀點(diǎn)云
和歷史相似幀點(diǎn)云 進(jìn)行相對(duì)位姿變換的計(jì)算。相對(duì)位姿的計(jì)算使用點(diǎn)云的邊角特征和平面特征配準(zhǔn)方法,即使用三維點(diǎn)的曲率計(jì)算公式[13]計(jì)算點(diǎn)云不同位置處的光滑度,以光滑度為依據(jù)提取點(diǎn)云的邊角特征和平面特征,只對(duì)邊角特征和平面特征進(jìn)行點(diǎn)云配準(zhǔn),提高了計(jì)算速度。
進(jìn)行相對(duì)位姿變換的計(jì)算。相對(duì)位姿的計(jì)算使用點(diǎn)云的邊角特征和平面特征配準(zhǔn)方法,即使用三維點(diǎn)的曲率計(jì)算公式[13]計(jì)算點(diǎn)云不同位置處的光滑度,以光滑度為依據(jù)提取點(diǎn)云的邊角特征和平面特征,只對(duì)邊角特征和平面特征進(jìn)行點(diǎn)云配準(zhǔn),提高了計(jì)算速度。
為減少點(diǎn)云的誤匹配概率,使用曲率估計(jì)方法對(duì)點(diǎn)云配準(zhǔn)效果進(jìn)行驗(yàn)證。當(dāng)前幀邊角點(diǎn)和平面點(diǎn)分別在相似幀邊角特征和平面特征中搜索匹配點(diǎn),對(duì)相似幀的特征進(jìn)行主成分分析,計(jì)算其特征值 。
。
其中,當(dāng)點(diǎn)云為邊角特征時(shí),掃描點(diǎn)按照線方向分布;為平面特征時(shí),掃描點(diǎn)呈現(xiàn)平面式分布,在垂直平面方向上的方差最小。邊角特征和平面特征應(yīng)分別滿足如下關(guān)系式:

對(duì)于配準(zhǔn)后的相似幀點(diǎn)云,構(gòu)建需要求解的目標(biāo)函數(shù),使用Levenberg-Marquardt法迭代求解使目標(biāo)函數(shù)最小的位姿變換,其目標(biāo)函數(shù)如下:
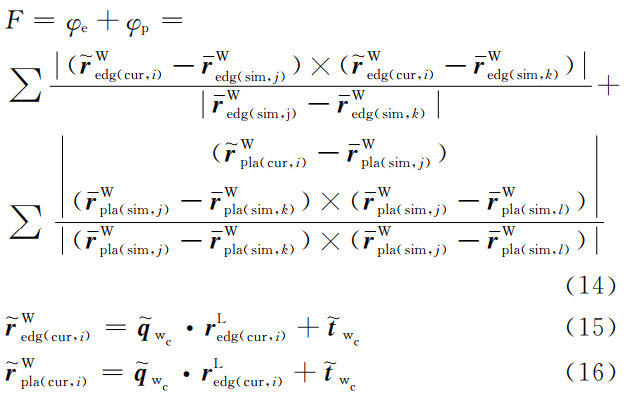
式中:上標(biāo)L和W分別為局部和世界坐標(biāo)系;上劃線-為測(cè)量值,~為估計(jì)值; 為當(dāng)前邊角特征點(diǎn)云
為當(dāng)前邊角特征點(diǎn)云 中一點(diǎn)
中一點(diǎn) 在激光雷達(dá)局部坐標(biāo)系下的坐標(biāo);
在激光雷達(dá)局部坐標(biāo)系下的坐標(biāo); 為當(dāng)前平面特征點(diǎn)云
為當(dāng)前平面特征點(diǎn)云 中一點(diǎn)
中一點(diǎn) 在激光雷達(dá)局部坐標(biāo)系下的坐標(biāo);
在激光雷達(dá)局部坐標(biāo)系下的坐標(biāo); ,
, 分別為相似幀邊角特征點(diǎn)云在世界坐標(biāo)系下距離
分別為相似幀邊角特征點(diǎn)云在世界坐標(biāo)系下距離 最近的兩點(diǎn)坐標(biāo);
最近的兩點(diǎn)坐標(biāo); ,
, ,
, 分別為相似幀平面特征在世界坐標(biāo)系下距離
分別為相似幀平面特征在世界坐標(biāo)系下距離 最近的三點(diǎn)坐標(biāo);
最近的三點(diǎn)坐標(biāo); ,
, 分別為邊角和平面特征的目標(biāo)函數(shù),其含義為配準(zhǔn)點(diǎn)到線或平面的距離;
分別為邊角和平面特征的目標(biāo)函數(shù),其含義為配準(zhǔn)點(diǎn)到線或平面的距離; 和
和 為待求解變量,分別為當(dāng)前坐標(biāo)系到世界坐標(biāo)系下的旋轉(zhuǎn)四元數(shù)估計(jì)值和平移向量估計(jì)值。
為待求解變量,分別為當(dāng)前坐標(biāo)系到世界坐標(biāo)系下的旋轉(zhuǎn)四元數(shù)估計(jì)值和平移向量估計(jì)值。
邊角特征和平面特征的配準(zhǔn)如圖4所示,其中:黑色點(diǎn)云為當(dāng)前幀;綠色點(diǎn)云為歷史相似幀;黑色加粗點(diǎn)為當(dāng)前幀邊角特征點(diǎn)坐標(biāo) 和平面特征點(diǎn)坐標(biāo)
和平面特征點(diǎn)坐標(biāo) ;綠色加粗點(diǎn)分別為相似幀的邊角特征點(diǎn)
;綠色加粗點(diǎn)分別為相似幀的邊角特征點(diǎn) ,
, 構(gòu)成直線,以及平面特征點(diǎn)
構(gòu)成直線,以及平面特征點(diǎn) ,
, ,
, 構(gòu)成平面。
構(gòu)成平面。
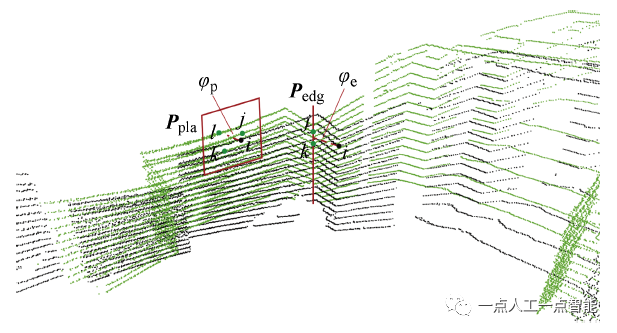
圖4 邊角特征和平面特征點(diǎn)云配準(zhǔn)
1.4 因子圖優(yōu)化
通過(guò)位姿變換方法可以獲得當(dāng)前關(guān)鍵幀與歷史相似幀之間的相對(duì)位姿變換,以此建立新的回環(huán)約束,構(gòu)建因子圖如圖5所示。其中: 為測(cè)量函數(shù);
為測(cè)量函數(shù); 為測(cè)量噪聲協(xié)方差矩陣;因子圖由一系列不同時(shí)刻位姿測(cè)量值
為測(cè)量噪聲協(xié)方差矩陣;因子圖由一系列不同時(shí)刻位姿測(cè)量值 和地圖路標(biāo)點(diǎn)
和地圖路標(biāo)點(diǎn)
的觀測(cè)量構(gòu)成。每條實(shí)線為1次前后幀之間的位姿累積測(cè)量事件,每條虛線為1次檢測(cè)到的回環(huán)約束測(cè)量事件,將因子圖表達(dá)轉(zhuǎn)換為線性化的約束的線性矩陣 的形式,每一個(gè)新的測(cè)量值都會(huì)致使信息矩陣發(fā)生更新。
的形式,每一個(gè)新的測(cè)量值都會(huì)致使信息矩陣發(fā)生更新。
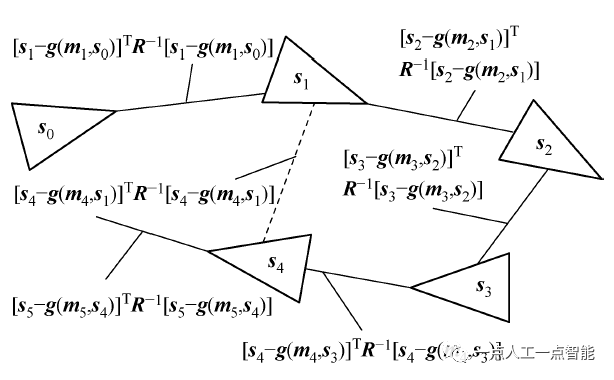
圖5 因子圖優(yōu)化模型
對(duì)于1次測(cè)量事件, 和
和 時(shí)刻位姿測(cè)量值分別為
時(shí)刻位姿測(cè)量值分別為 ,
, ,對(duì)應(yīng)的路標(biāo)點(diǎn)集合為
,對(duì)應(yīng)的路標(biāo)點(diǎn)集合為 測(cè)量事件構(gòu)成的約束函數(shù)如下:
測(cè)量事件構(gòu)成的約束函數(shù)如下:

因子圖優(yōu)化的過(guò)程為求解目標(biāo)函數(shù)得到概率最大的地圖和位姿信息路徑,其目標(biāo)函數(shù)為測(cè)量約束的集合,目標(biāo)函數(shù)公式如下:

因子圖優(yōu)化的方法將圖映射為信息矩陣的表達(dá)方式進(jìn)行求解,利用圖的稀疏性特點(diǎn),在求解過(guò)程中保持較低的計(jì)算量和錯(cuò)誤的數(shù)據(jù)關(guān)聯(lián),優(yōu)于一般的濾波方法[17]。
02 實(shí)驗(yàn)結(jié)果與討論
2.1 準(zhǔn)確率和召回率實(shí)驗(yàn)
準(zhǔn)確率和召回率是衡量回環(huán)檢測(cè)模塊中相似度檢測(cè)算法性能的重要指標(biāo),在回環(huán)檢測(cè)算法設(shè)計(jì)中需首先保證較高的準(zhǔn)確率,其次在滿足高準(zhǔn)確率的同時(shí)盡可能提高相似度檢測(cè)模塊的召回率。
準(zhǔn)確率和召回率的計(jì)算方法如下:
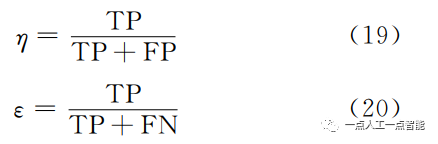
式中: 為準(zhǔn)確率;
為準(zhǔn)確率; 為召回率;TP為正確識(shí)別出同一場(chǎng)景的數(shù)量;FP為將不同場(chǎng)景錯(cuò)誤識(shí)別為同一場(chǎng)景的數(shù)量;FN為同一場(chǎng)景被錯(cuò)誤識(shí)別為不同場(chǎng)景的數(shù)量。
為召回率;TP為正確識(shí)別出同一場(chǎng)景的數(shù)量;FP為將不同場(chǎng)景錯(cuò)誤識(shí)別為同一場(chǎng)景的數(shù)量;FN為同一場(chǎng)景被錯(cuò)誤識(shí)別為不同場(chǎng)景的數(shù)量。
實(shí)驗(yàn)采用蘇黎世聯(lián)邦理工學(xué)院公開(kāi)數(shù)據(jù)集[18]進(jìn)行測(cè)試,該數(shù)據(jù)集為手持激光雷達(dá)在真實(shí)礦井中掃描得到的數(shù)據(jù)。改變相似度檢測(cè)算法的閾值ω(0<ω<1),以此測(cè)試算法在不同閾值情況下的準(zhǔn)確率和召回率,結(jié)果如圖6所示。
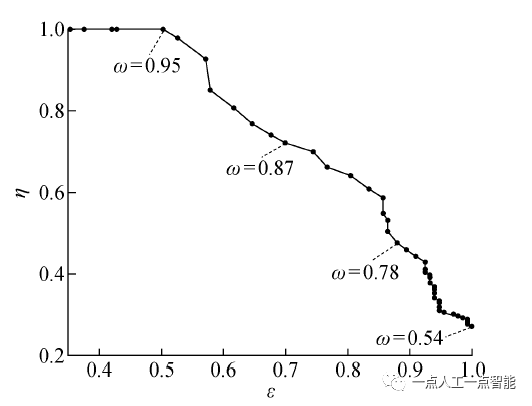
圖6 準(zhǔn)確率和召回率曲線
由圖6可知,在保證準(zhǔn)確率為100%的條件下,召回率最高可以達(dá)到50。76%,超過(guò)一半的相似場(chǎng)景會(huì)被召回,此時(shí)閾值 為0。95,隨著閾值進(jìn)一步降低,召回率增大,準(zhǔn)確率降低,回環(huán)檢測(cè)可能出現(xiàn)錯(cuò)誤匹配,得到錯(cuò)誤的位姿信息,對(duì)定位和建圖產(chǎn)生嚴(yán)重的影響、因此應(yīng)保證高準(zhǔn)確率,在后續(xù)算法實(shí)驗(yàn)中均將閾值設(shè)置為0。95,此時(shí)準(zhǔn)確率為100%。
為0。95,隨著閾值進(jìn)一步降低,召回率增大,準(zhǔn)確率降低,回環(huán)檢測(cè)可能出現(xiàn)錯(cuò)誤匹配,得到錯(cuò)誤的位姿信息,對(duì)定位和建圖產(chǎn)生嚴(yán)重的影響、因此應(yīng)保證高準(zhǔn)確率,在后續(xù)算法實(shí)驗(yàn)中均將閾值設(shè)置為0。95,此時(shí)準(zhǔn)確率為100%。
2.2 定位精度實(shí)驗(yàn)
本文進(jìn)行了多組仿真和開(kāi)源數(shù)據(jù)集下的定位精度實(shí)驗(yàn)。實(shí)驗(yàn)平臺(tái)CPU為AMD 3600,內(nèi)存16 GB,算法采用C++語(yǔ)言編寫,均在Ubuntu 18.0的機(jī)器人操作系統(tǒng)(ROS)進(jìn)行測(cè)試。仿真實(shí)驗(yàn)中,使用文獻(xiàn)[19]提供的開(kāi)源數(shù)據(jù)進(jìn)行測(cè)試,該數(shù)據(jù)來(lái)自于美國(guó)國(guó)防部高級(jí)研究計(jì)劃局(DARPA)在匹斯堡舉行的“DARPA地下煤礦挑戰(zhàn)賽”。使用該數(shù)據(jù)集進(jìn)行了4組實(shí)驗(yàn),其中Sim_mine_1和Sim_mine_2為仿真實(shí)驗(yàn),將井下三維模型導(dǎo)入Gazebo仿真系統(tǒng),添加傳感器進(jìn)行數(shù)據(jù)采集,模擬巡檢工作。搭建的仿真實(shí)驗(yàn)環(huán)境如圖7所示,仿真實(shí)驗(yàn)中以無(wú)人機(jī)作為載體,上方搭載Velodyne-16激光雷達(dá)進(jìn)行數(shù)據(jù)采集。

圖7 井下仿真實(shí)驗(yàn)環(huán)境
M100_Underground和M100_Tunnel分別為在真實(shí)礦井中大疆M100無(wú)人機(jī)搭載激光雷達(dá)在井下巷道和礦山隧道巡檢時(shí)錄制的數(shù)據(jù)包文件,其中包含了雷達(dá)運(yùn)動(dòng)過(guò)程中的里程計(jì)信息。共進(jìn)行了4組井下環(huán)境的實(shí)驗(yàn),實(shí)驗(yàn)中每次巡檢結(jié)束時(shí),傳感器回到起點(diǎn)附近。實(shí)驗(yàn)對(duì)照算法分別為L(zhǎng)OAM[13],以及復(fù)現(xiàn)文獻(xiàn)[9]的回環(huán)檢測(cè)算法,以LOAM作為前端里程計(jì),使用近鄰點(diǎn)搜索和ICP配準(zhǔn)進(jìn)行位姿變換計(jì)算的LOAM+ICP算法。將3種定位算法結(jié)果分別與仿真實(shí)驗(yàn)中記錄的真實(shí)值或開(kāi)源數(shù)據(jù)集中記錄的里程計(jì)值進(jìn)行對(duì)比。
實(shí)驗(yàn)的4個(gè)場(chǎng)景分別使用軌跡真實(shí)值進(jìn)行建圖,地圖情況如圖8所示。圖8(a)和8(b)分別為仿真環(huán)境的地圖,為開(kāi)采礦井的巷道場(chǎng)景,路段分叉多,通道為非結(jié)構(gòu)化場(chǎng)景,缺乏明顯特征;圖8(c)和8(d)為M100無(wú)人機(jī)搭載激光雷達(dá)掃描得到的地圖,圖8(c)環(huán)境與圖8(a)和8(b)類似,分叉路段多,通道為挖掘面,而圖8(d)為礦井入口隧道,采用水泥澆筑,具有支撐柱等結(jié)構(gòu)化特征。

圖8 實(shí)驗(yàn)場(chǎng)景點(diǎn)云地圖
算法定位精度實(shí)驗(yàn)中,進(jìn)行初始坐標(biāo)系對(duì)齊,以均方根誤差,全局最大誤差值以及終點(diǎn)處的絕對(duì)誤差作為評(píng)價(jià)定位精度的指標(biāo),實(shí)驗(yàn)結(jié)果如表1所示,其中:序號(hào)1,2,3,4分別為實(shí)驗(yàn)Sim_mine_1、實(shí)驗(yàn)Sim_mine_2、實(shí)驗(yàn)M100_Underground和實(shí)驗(yàn)M100_Tunnel。
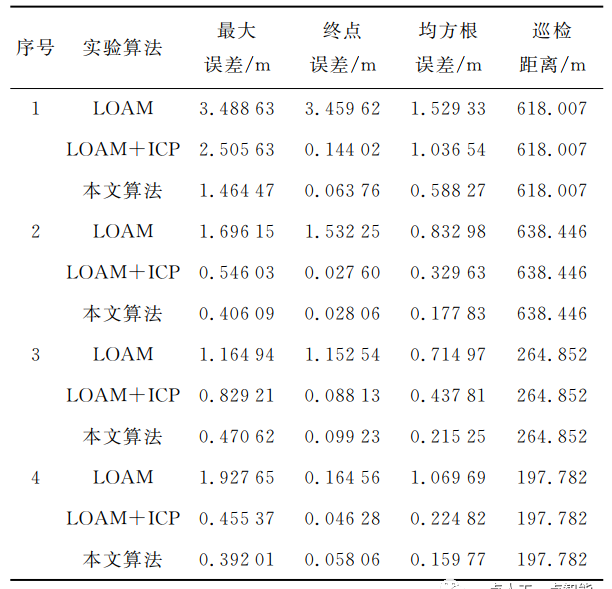
表1 定位精度實(shí)驗(yàn)結(jié)果
4次實(shí)驗(yàn)中,與沒(méi)有回環(huán)檢測(cè)模塊的LOAM算法相比,LOAM+ICP算法和本文算法在最大誤差,終點(diǎn)絕對(duì)誤差以及均方根絕對(duì)誤差3個(gè)指標(biāo)上均得到明顯提高。沒(méi)有回環(huán)檢測(cè)模塊的定位算法隨運(yùn)行時(shí)間增長(zhǎng),累積誤差逐步增大,體現(xiàn)為L(zhǎng)OAM算法的終點(diǎn)絕對(duì)誤差明顯大于其他兩種算法,這是造成LOAM算法全局軌跡的均方根誤差較大的主要原因。
使用定位評(píng)價(jià)和可視化工具(EVO)集繪制 Sim_mine_1實(shí)驗(yàn)中的定位軌跡,初始坐標(biāo)軸x,y,z對(duì)齊后的軌跡曲線如圖9所示,其中:t為時(shí)間。3種算法在z坐標(biāo)下的差值明顯,LOAM算法沒(méi)有回環(huán)檢測(cè)模塊,累積誤差未得到校正,最終偏移誤差絕對(duì)值最大;LOAM+ICP和本文算法在加入回環(huán)檢測(cè)后,在巡檢軌跡中間段產(chǎn)生一定偏移,但通過(guò)回環(huán)檢測(cè)校正了累積誤差,全局軌跡的均方根誤差較小。
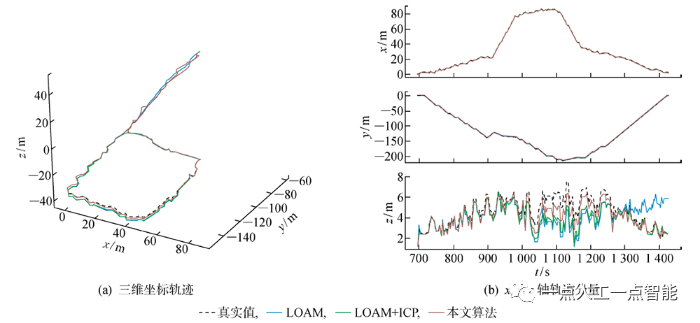
圖9 Sim_mine_1定位實(shí)驗(yàn)軌跡
與LOAM+ICP算法相比,本文算法的定位精度更高,均方根誤差較小,但兩者終點(diǎn)絕對(duì)誤差較為接近。其原因在于LOAM+ICP算法計(jì)算速度慢,影響了里程計(jì)算法的精度,中期誤差大,但當(dāng)檢測(cè)到回環(huán)時(shí)仍能計(jì)算出準(zhǔn)確的位姿,消除累積誤差。實(shí)驗(yàn)中LOAM+ICP算法和本文算法回環(huán)檢測(cè)部分各模塊的計(jì)算耗時(shí)如表2所示。
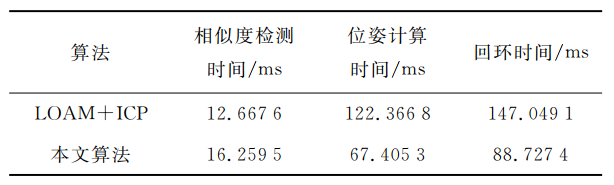
表2 算法各模塊運(yùn)行時(shí)間
上述實(shí)驗(yàn)數(shù)據(jù)均為實(shí)驗(yàn)過(guò)程中記錄的單次完整執(zhí)行對(duì)應(yīng)模塊需要的平均耗時(shí)。實(shí)驗(yàn)結(jié)果顯示,相似度檢測(cè)模塊中,LOAM+ICP基于位置進(jìn)行判斷,而本文算法需要計(jì)算點(diǎn)云描述子,算法步驟較多,在該模塊中耗時(shí)增加3.5919 ms;而在位姿計(jì)算模塊,LOAM+ICP通過(guò)ICP方法計(jì)算相似幀之間的位姿變換,對(duì)點(diǎn)云中的所有點(diǎn)進(jìn)行配準(zhǔn)、目標(biāo)函數(shù)的構(gòu)建和迭代求解,而本文算法基于曲率計(jì)算方法,僅對(duì)邊角和平面特征進(jìn)行處理和計(jì)算,優(yōu)化了計(jì)算效率,平均耗時(shí)由 122.3668 ms降至 67.4053 ms,降低了44.92%;回環(huán)時(shí)間反映了完整執(zhí)行一次回環(huán)檢測(cè)模塊需要的平均時(shí)間,得益于位姿計(jì)算時(shí)間的明顯下降,回環(huán)檢測(cè)模塊的整體耗時(shí)由 147.0491 ms降低為 88.7274 ms。
在LOAM+ICP算法中由于回環(huán)檢測(cè)模塊平均耗時(shí)超過(guò)100 ms,低于點(diǎn)云數(shù)據(jù)采集頻率10 Hz。且基于全局描述子的回環(huán)檢測(cè)方法解決了 LOAM+ICP算法召回率隨累積誤差增大不斷減小的問(wèn)題,在長(zhǎng)時(shí)間運(yùn)行中更加具有優(yōu)勢(shì)。
因子圖優(yōu)化模塊對(duì)于保證軌跡的全局一致性和平滑性有重要作用。Sim_mine_1實(shí)驗(yàn)使用本文算法進(jìn)行因子圖優(yōu)化前后的軌跡如圖10所示。其中:綠色軌跡為因子圖優(yōu)化前軌跡;紅色軌跡為因子圖優(yōu)化后軌跡。由局部放大圖可以看出,優(yōu)化后點(diǎn)云地圖無(wú)重影,全局一致性良好,因子圖優(yōu)化前軌跡的均方根誤差為 0。888733 m,大于優(yōu)化后的 0。588270 m。
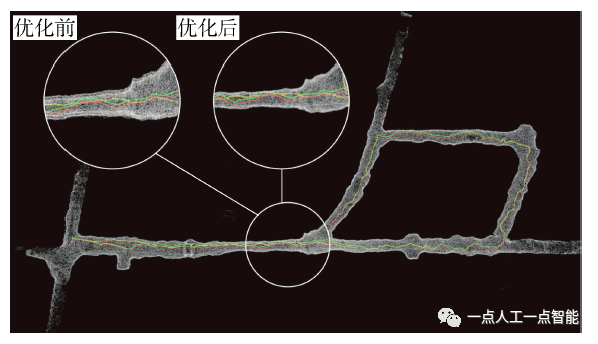
圖10 因子圖優(yōu)化前后軌跡
03 結(jié)語(yǔ)
針對(duì)井下巡檢時(shí)定位誤差隨時(shí)間不斷累積的問(wèn)題,提出一種適用于激光SLAM的基于點(diǎn)云全局特征描述子的回環(huán)檢測(cè)方法。該方法具有以下優(yōu)勢(shì):
①充分利用了井下巷道的結(jié)構(gòu)特征,相似度檢測(cè)不受位姿信息約束,通過(guò)曲率分別提取通道四周墻壁邊角處和平面處的特征向量,利用特征向量和點(diǎn)云中心點(diǎn)之間的角度關(guān)系和點(diǎn)云通道和中心點(diǎn)之間的距離關(guān)系構(gòu)建了全局特征描述子;
②提高了計(jì)算速度,基于邊角點(diǎn)和平面點(diǎn)配準(zhǔn)策略,進(jìn)行高效率的位姿變換算法研究;
③全局一致性優(yōu),采用因子圖優(yōu)化獲得了使全局誤差最小的位姿,校正了累積誤差。
實(shí)驗(yàn)結(jié)果表明,本文算法定位精度相較于不加回環(huán)檢測(cè)的LOAM算法和使用距離信息進(jìn)行回環(huán)檢測(cè)的LOAM+ICP算法得到較大提升,在長(zhǎng)時(shí)間長(zhǎng)距離的實(shí)驗(yàn)中提升效果顯著。實(shí)驗(yàn)結(jié)果對(duì)于井下執(zhí)行長(zhǎng)時(shí)間的巡檢任務(wù)具有指導(dǎo)意義,未來(lái)工作中考慮進(jìn)一步研究,將算法應(yīng)用于井下巡檢無(wú)人機(jī)平臺(tái)上,探究在實(shí)際應(yīng)用場(chǎng)景中的可行性。
編輯:黃飛
-
激光
+關(guān)注
關(guān)注
20文章
3431瀏覽量
65882 -
SLAM
+關(guān)注
關(guān)注
24文章
436瀏覽量
32359 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4203瀏覽量
192132
原文標(biāo)題:基于全局特征描述子的激光SLAM回環(huán)檢測(cè)方法
文章出處:【微信號(hào):3D視覺(jué)工坊,微信公眾號(hào):3D視覺(jué)工坊】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
探討目前主流3D激光SLAM算法方案

淺談SLAM的回環(huán)檢測(cè)技術(shù)
AGV激光雷達(dá)SLAM定位導(dǎo)航技術(shù)
SLAM大法之回環(huán)檢測(cè)
一種適用于旋轉(zhuǎn)角的人體檢測(cè)算法
OpenCV3.1的使用教程之圖像特征描述的詳細(xì)資料說(shuō)明
一種適用于動(dòng)態(tài)場(chǎng)景的SLAM方法

基于OpenCV3.1的圖像特征描述功能實(shí)現(xiàn)
相關(guān)VI-SLAM算法內(nèi)容總結(jié)

什么樣的點(diǎn)可以稱為三維點(diǎn)云中的關(guān)鍵點(diǎn)呢?
十大點(diǎn)云數(shù)據(jù)處理技術(shù)和點(diǎn)云應(yīng)用匯總
3D激光SLAM核心:為什么要進(jìn)行點(diǎn)云特征提取

3D重建的SLAM方案算法解析







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論