 激光雷達SLAM中高效的點云數據結構
激光雷達SLAM中高效的點云數據結構
k-d樹是一種常用的多維數據結構,它可以用于范圍搜索、最近鄰搜索等問題。但是,在實際應用中,我們經常需要對動態數據進行查詢和修改操作。這時候,傳統的k-d樹就顯得力不從心了。為了解決這個問題,研究人員提出了動態k-d樹(Dynamic k-d Tree)這一概念。與傳統的k-d樹不同,動態k-d樹可以支持插入、刪除和修改操作,并且能夠保持平衡狀態。動態k-d樹可以用于各種多維數據結構問題,例如范圍搜索、最近鄰搜索等。本文將介紹動態k-d樹的基本原理、實現方法。
1 基本原理
1.1 k-d樹
首先,我們來回顧一下傳統的k-d樹。k-d樹是一種二叉搜索樹,它將每個節點表示為一個超矩形,并按照某種規則將超矩形劃分成兩個子區域。具體來說,k-d樹的構建過程如下:
選擇一個維度d,將數據集按照第d個維度的值進行排序。
選擇中位數作為根節點,并將數據集分成兩個子集。左子集包含小于中位數的所有數據,右子集包含大于中位數的所有數據。
對左右子集遞歸執行步驟1和步驟2,直到每個節點只包含一個數據點
在k-d樹中,每個節點都表示一個超矩形,其中包含了一些數據點。對于任意一個節點,它的左子樹和右子樹所代表的超矩形是不相交的。因此,在搜索時,我們可以通過比較查詢點與當前節點所代表的超矩形的位置關系來確定搜索方向。例如,在二維平面上構建k-d樹時,每個節點都代表一個矩形區域。如果查詢點在當前節點所代表的矩形區域的左下角,則搜索方向為左子樹;如果查詢點在右上角,則搜索方向為右子樹。
1.2 動態k-d樹
傳統的k-d樹只能處理靜態數據集,即數據集不會發生變化。但是,在實際應用中,我們經常需要對動態數據進行查詢和修改操作。例如,在機器人運動規劃中,機器人需要不斷地獲取周圍環境信息,并進行路徑規劃。這時候,傳統的k-d樹就無法滿足需求了。
為了解決這個問題,研究人員提出了動態k-d樹(Dynamic k-d Tree)這一概念。與傳統的k-d樹不同,動態k-d樹可以支持插入、刪除和修改操作,并且能夠保持平衡狀態。
在動態k-d樹中,每個節點都代表一個超矩形區域,其中包含了一些數據點。與傳統的k-d樹不同的是,動態k-d樹中的節點可以被插入、刪除或修改。當一個節點被插入時,我們需要重新構建整個樹;當一個節點被刪除時,我們需要將其從樹中移除,并重新平衡整個樹;當一個節點被修改時,我們需要更新其所代表的超矩形區域,并重新平衡整個樹。
2. ikd-Tree設計與實現
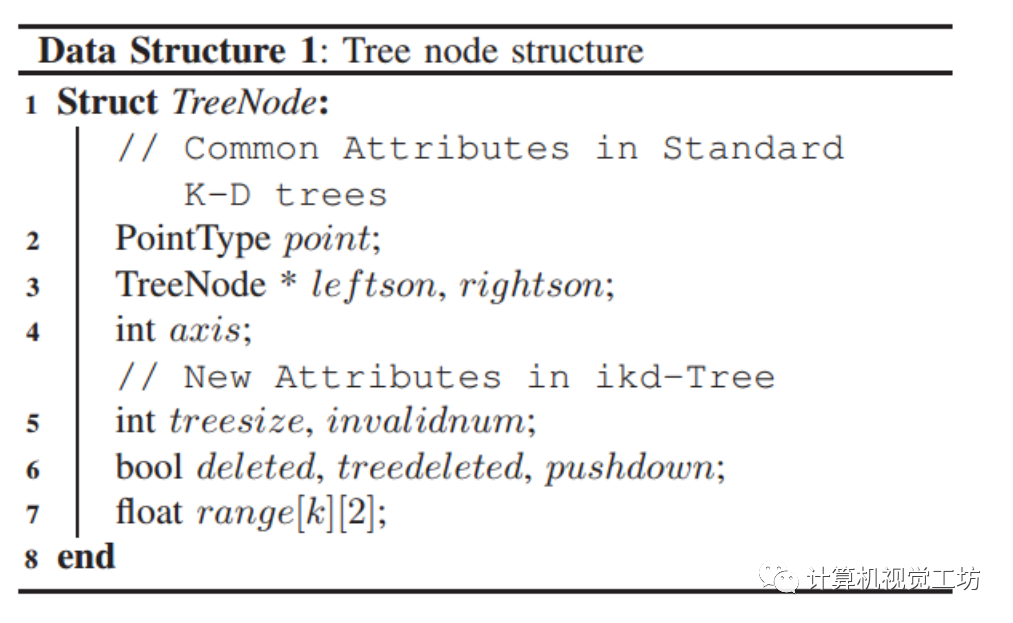
ikd-Tree是一種基于K-D樹的動態數據結構。它由一個二叉搜索樹組成,在每個節點上存儲一個超矩形區域和一個點集合。超矩形區域是由該節點所代表的所有點確定的最小超矩形區域。每個節點都有一個劃分軸和劃分值來將其子節點分成兩個子集。ikd-Tree的基本結構,包括節點、分割平面和子樹等和一些增量操作,包括插入、重新插入和刪除等。在這些操作中,ikd-Tree使用遞歸算法來更新節點,并通過旋轉和重建子樹來保持平衡。此外,該節還介紹了如何進行動態重新平衡,以避免樹的不平衡導致查詢效率下降。最后,該節討論了如何使用ikd-Tree進行最近點搜索。ikd-Tree 中樹節點的屬性在下表中給出。第 2-4 行是標準 k-d 樹的公共屬性。屬性 left tson 和 rightson 分別是指向它的左子節點和右子節點的指針。點信息(例如點坐標、強度)存儲在點中。由于一個點對應于 k-d 樹上的單個節點,因此我們將互換使用點和節點。劃分軸記錄在axis中。第 5-7 行是為第 III-C 節中詳述的增量更新而設計的新屬性。
2.1 增量更新和重新平衡
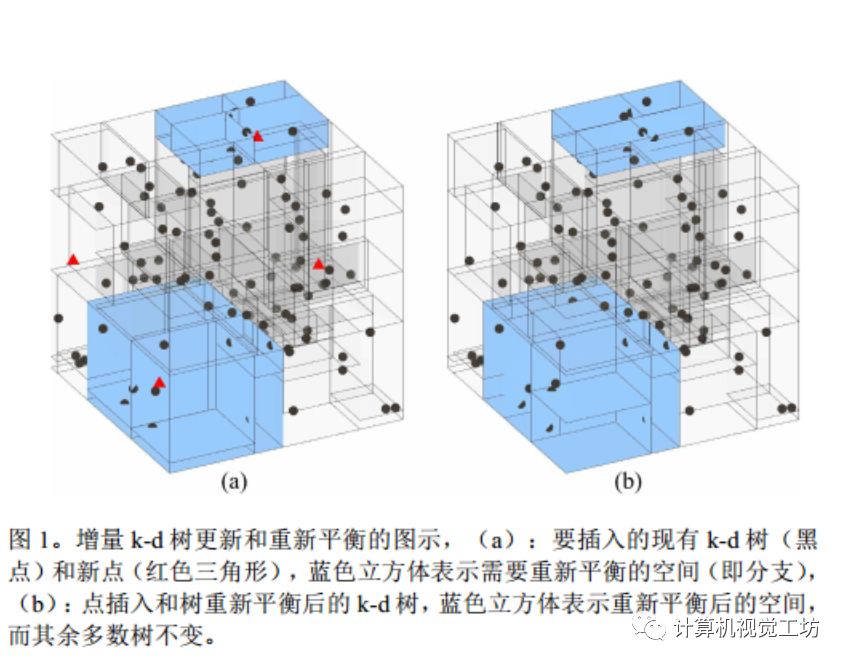
圖1展示了增量k-d樹的更新和重新平衡過程。在這個例子中,黑色點表示現有的k-d樹節點,紅色三角形表示要插入的新點。藍色立方體表示需要重新平衡的空間(即分支)。在插入新點后,ikd-Tree使用旋轉和重建子樹來保持平衡,并將藍色立方體移動到正確的位置。
2.2 盒式操作和下采樣
盒式操作是指將空間劃分為多個盒子,以便更快地搜索最近的點。在ikd-Tree中,這是一種針對數據坐標軸對齊的矩形框內的所有點進行插入、刪除或重新插入操作的方法。這些矩形框可以由用戶指定,也可以根據數據集自動計算得出。下采樣是指在保持數據分布的同時減少數據量,從而提高查詢效率。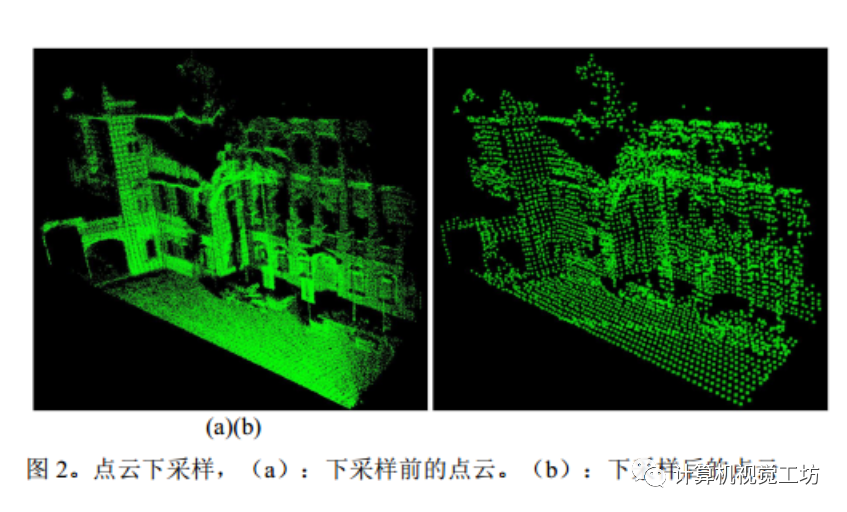
2.3 動態重新平衡
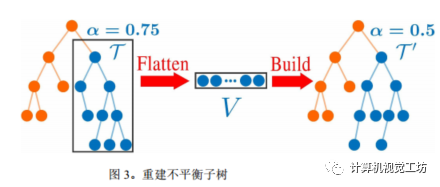
ikd-Tree還支持動態重新平衡,以避免樹的不平衡導致查詢效率下降。具體來說,ikd-Tree使用部分重建方法來重新平衡樹。當需要重新平衡時,ikd-Tree將樹分成兩個部分,并在兩個線程中同時進行重建操作。這種方法可以最大限度地減少重建時間,并提高整體效率。
3 時間和空間復雜度
該節介紹了ikd-Tree分別對插入、刪除、查詢和重建等操作的時間復雜度進行了分析。最后,該節還討論了ikd-Tree的空間復雜度和實際應用中的性能表現。ikd-Tree是一種基于k-d樹的增量數據結構,可以在機器人應用中高效地進行點云數據處理、路徑規劃等操作。
在ikd-Tree中,每個節點都包含一個分割平面和兩個子樹,其中左子樹包含小于分割平面值的點,右子樹包含大于等于分割平面值的點。通過遞歸算法,在每個節點上進行二分查找,并通過旋轉和重建子樹來保持平衡。在插入操作方面,該節指出,在最壞情況下,插入一個新點需要O(n)次比較操作(其中n表示樹中節點數目)。這是因為新點可能會被插入到所有節點的左或右子樹中。但是,在實際應用中,由于ikd-Tree使用動態重新平衡方法來保持平衡,并且支持下采樣等功能來減少數據量,因此插入操作的時間復雜度通常為O(log n)。
在刪除操作方面,該節指出,刪除一個節點需要O(log n)次比較操作。這是因為ikd-Tree使用遞歸算法來查找要刪除的節點,并通過旋轉和重建子樹來保持平衡。但是,在實際應用中,由于ikd-Tree支持下采樣等功能來減少數據量,因此刪除操作的時間復雜度通常為O(log n) 在查詢操作方面,該節指出,ikd-Tree的查詢操作需要O(log n)次比較操作。這是因為在每個節點上進行二分查找,并根據分割平面的值來選擇左或右子樹進行遞歸查找。由于ikd-Tree使用動態重新平衡方法來保持平衡,并且支持下采樣等功能來減少數據量,因此查詢操作的時間復雜度通常為O(log n)。
在重建操作方面,該節指出,ikd-Tree使用部分重建方法來重新平衡樹。當需要重新平衡時,ikd-Tree將樹分成兩個部分,并在兩個線程中同時進行重建操作。這種方法可以最大限度地減少重建時間,并提高整體效率。由于ikd-Tree支持動態重新平衡和部分重建等功能,因此重建操作的時間復雜度通常為O(log n)。
在空間復雜度方面,該節指出,ikd-Tree需要O(n)的空間來存儲所有節點和數據點。每個節點都需要存儲其分割平面、子樹信息以及其他元數據。但是,在實際應用中,由于ikd-Tree支持下采樣等功能來減少數據量,并且可以通過壓縮存儲等技術進一步減少所需存儲空間。
歡迎關注「3D視覺工坊」,加群/文章投稿/課程主講,請加微信:dddvisiona,添加時請備注:加群/投稿/主講申請
實驗結果與分析
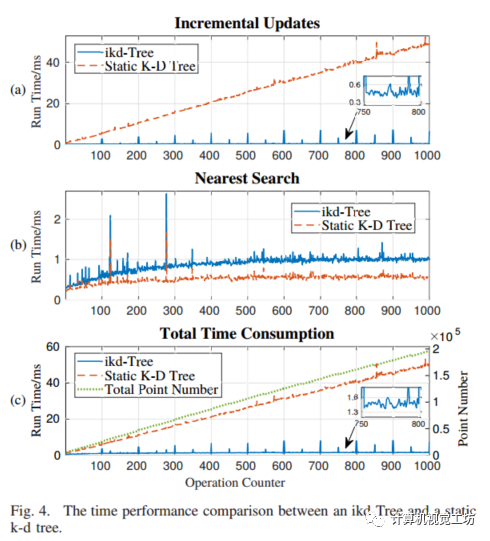
該節首先介紹了測試環境和數據集,包括使用的硬件和軟件配置以及測試數據的來源和特點。然后,該節詳細討論了ikd-Tree在不同應用場景下的性能表現,并與其他數據結構進行了比較。這些實驗分別是基于隨機增量數據集的實驗和基于LiDAR測距儀的室外SLAM實驗。在隨機增量數據集實驗中,ikd-Tree的效率得到了充分驗證。該實驗使用1000個點作為初始數據集,并逐步增加1000個點進行測試。圖4(a)展示了ikd-Tree和靜態k-d樹之間的運行時間比較,其中x軸表示增量更新次數,y軸表示運行時間(單位:毫秒)。
可以看出,在增量更新次數較少時,ikd-Tree和靜態k-d樹之間的運行時間差異不大。但是,當增量更新次數達到一定數量時,ikd-Tree明顯優于靜態k-d樹,并且具有更好的擴展性。圖4(b)展示了ikd-Tree和靜態k-d樹之間的最近鄰搜索時間比較,其中x軸表示查詢次數,y軸表示運行時間(單位:毫秒)。可以看出,在查詢次數較少時,ikd-Tree和靜態k-d樹之間的查詢時間差異不大。但是,在查詢次數達到一定數量時,ikd-Tree明顯優于靜態k-d樹,并且具有更好的擴展性。圖4(c)展示了ikd-Tree和靜態k-d樹之間的操作計數和總時間消耗比較,其中x軸表示點數,y軸表示操作計數和總時間消耗。在點數達到一定數量時,ikd-Tree明顯優于靜態k-d樹。
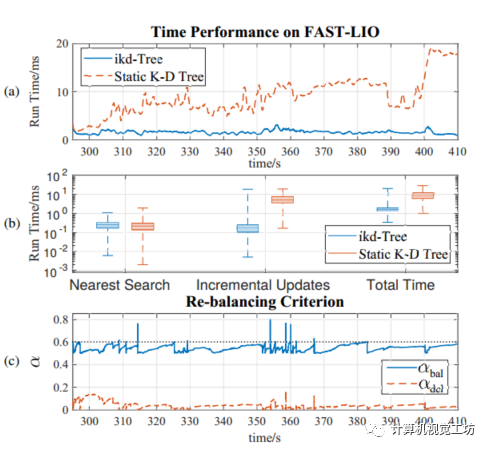
在LiDAR的室外SLAM實驗中,ikd-Tree也表現出了優異的性能。該實驗使用了一個移動機器人和一個LiDAR,通過對周圍環境進行掃描來構建地圖。圖5展示了ikd-Tree在該實驗中的性能表現,其中x軸表示時間(單位:秒),y軸表示運行時間(單位:毫秒)。可以看出,在整個實驗過程中,ikd-Tree的運行時間始終保持在較低水平。
審核編輯:劉清
-
機器人
+關注
關注
213文章
29533瀏覽量
211725 -
SLAM
+關注
關注
24文章
436瀏覽量
32352 -
激光雷達
+關注
關注
971文章
4203瀏覽量
192083 -
LiDAR芯片
+關注
關注
1文章
17瀏覽量
3316
原文標題:ikd樹:激光雷達SLAM中高效的點云數據結構
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄





 工商網監
工商網監
評論