") 如何快速完成6自由度工業(yè)機(jī)器人的工具校準(zhǔn)?
如何快速完成6自由度工業(yè)機(jī)器人的工具校準(zhǔn)?
隨著機(jī)器人變得日益成熟,它們已經(jīng)能夠應(yīng)用到處理越來(lái)越多的工業(yè)工序。6自由度(6Dof)機(jī)器人能夠執(zhí)行復(fù)雜的動(dòng)作,因而可以在許多復(fù)雜的工業(yè)任務(wù)當(dāng)中展示良好的性能,比如碼垛、搬運(yùn)、涂膠和焊接等。6自由度機(jī)器人可以提舉和靈活地操縱重型載荷,并通過(guò)復(fù)雜的幾何運(yùn)動(dòng)對(duì)載荷進(jìn)行精確操控。
基于其良好的性能和靈活性,6自由度機(jī)器人被用來(lái)與各種工具相結(jié)合,應(yīng)用于許多不同的任務(wù)。但是,每次引入新的工具時(shí),都需要進(jìn)行精確的重新校準(zhǔn),然后才能發(fā)揮這種機(jī)器人的能力。重新校準(zhǔn)經(jīng)常既耗費(fèi)時(shí)間又不準(zhǔn)確,妨礙了工業(yè)過(guò)程的順利運(yùn)作,對(duì)生產(chǎn)造成拖延。
Servotronix創(chuàng)造了一種有效的位置示教方法,可以對(duì)6自由度機(jī)器人所使用的新工具進(jìn)行快速校準(zhǔn),并且不必依賴(lài)制造商測(cè)量或外部傳感器。該方法簡(jiǎn)單、準(zhǔn)確,對(duì)實(shí)際應(yīng)用非常有效。
校 準(zhǔn)
6自由度機(jī)器人執(zhí)行任務(wù)時(shí)需要對(duì)工具進(jìn)行保持和移動(dòng)。為了達(dá)到令人滿(mǎn)意的性能,機(jī)器人在工作時(shí)必須知道工具的精確位置。每次裝配不同工具時(shí),機(jī)器人都必須再次精確地校準(zhǔn)。
校準(zhǔn)6自由度機(jī)器人有不同的方法。比如與參考部件接觸,使用距離傳感器,以及使用激光干涉儀測(cè)量等。此外,可以將外部傳感器,比如攝影系統(tǒng),裝在機(jī)器人的不同位置,以便獲取機(jī)器人校準(zhǔn)參照物體的精確位置。
這些方法既耗費(fèi)時(shí)間,又比較復(fù)雜。Servotronix開(kāi)發(fā)了一款更加簡(jiǎn)單的方法,并且已經(jīng)實(shí)現(xiàn)了卓越的結(jié)果。以下我們將對(duì)該方法加以說(shuō)明。
確定工具中心點(diǎn)
我們使用運(yùn)動(dòng)學(xué)校準(zhǔn)方法來(lái)確定工具中心點(diǎn)(TCP),所有機(jī)器人定位都是以該點(diǎn)為基準(zhǔn)加以定義。TCP定義在世界坐標(biāo)系下–可對(duì)世界上的任何一點(diǎn)進(jìn)行定位的笛卡爾坐標(biāo)系統(tǒng)。該坐標(biāo)系統(tǒng)相對(duì)于所述機(jī)器人將始終保持靜止。
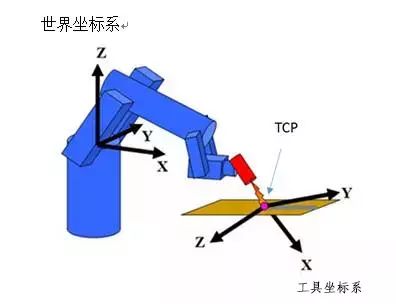
工具坐標(biāo)系定義了工具的位置和姿態(tài),并且將坐標(biāo)的零點(diǎn)設(shè)在工具的中心點(diǎn)(TCP)。機(jī)器人的TCP將會(huì)隨著其執(zhí)行笛卡爾運(yùn)動(dòng)而移動(dòng)到已編程位置。更換工具將會(huì)改變工具的坐標(biāo)系,因此需要重新校準(zhǔn),以便使新的TCP準(zhǔn)確到達(dá)目標(biāo)位置。
在許多機(jī)器人應(yīng)用當(dāng)中,TCP的運(yùn)動(dòng)軌跡意味著機(jī)器人工作空間內(nèi)的復(fù)雜路徑,通常為一條變姿態(tài)的工具直線(xiàn)路徑。此工具本身需要偶爾更換,甚至需要頻繁更換。每次更換工具時(shí),在機(jī)器人恢復(fù)操作之前,必須確定并配置一組新的幾何參數(shù)。
在大多數(shù)工業(yè)應(yīng)用當(dāng)中,對(duì)于機(jī)器人任務(wù)編程來(lái)說(shuō),位置示教是最實(shí)用的方法。使用這種方法時(shí),必須具備高精度的工具參數(shù)(通常來(lái)自制造商),包括工具的角偏移(偏航,俯仰和翻滾)以及笛卡爾偏移,以便生成具有可控的工具姿態(tài)的直線(xiàn)路徑。
但不幸的是,操作者經(jīng)常會(huì)發(fā)現(xiàn)工具的幾何參數(shù)識(shí)別會(huì)受到某些制約,比如說(shuō):(1)沒(méi)有來(lái)自制造商關(guān)于工具尺寸的資料;(2)沒(méi)有可用的硬件協(xié)助;(3)無(wú)法得知如何將工具安裝到機(jī)器人法蘭。在面臨這些限制時(shí),每次更換工具,操作者都必須浪費(fèi)大量時(shí)間去校準(zhǔn)工具。
精確評(píng)估簡(jiǎn)化標(biāo)定
Servotronix已經(jīng)開(kāi)發(fā)出一種方法,用于快速和精確地估算工具幾何參數(shù),無(wú)需外部傳感器、視覺(jué)或其他協(xié)助,也無(wú)需拆卸工具。在這種位置示教方法當(dāng)中,操作者只需將6自由度機(jī)器人的TCP放在幾個(gè)不同的位姿,然后自動(dòng)輸入Servotronix的工具尺寸評(píng)估算法。該算法可以快速確定新工具的精確校準(zhǔn)參數(shù),從而使工具快速投入使用。
這種校準(zhǔn)方法的精度將會(huì)隨著工具位姿樣本的增加而提高。我們的實(shí)驗(yàn)表明,使用逆齊次轉(zhuǎn)換矩陣未必能夠生成期望的結(jié)果,但使用最小二乘法將可產(chǎn)生精確的校準(zhǔn)值。
Servotronix的方法
我們使用一個(gè)配有工具的6自由度機(jī)器人,六個(gè)Servotronix高性能CDHD伺服驅(qū)動(dòng)器,以及Servotronix softMC控制器進(jìn)行測(cè)試。我們的方法只涉及分析計(jì)算而無(wú)需拆卸工具。我們只評(píng)估XYZ尺寸,并且假設(shè)工具的端點(diǎn)處于恒定的笛卡爾坐標(biāo)位置。
不證自明的是,所有指向同一位置的機(jī)器人姿態(tài)必須位于一個(gè)球體上,并且工具端點(diǎn)位于球體中心:
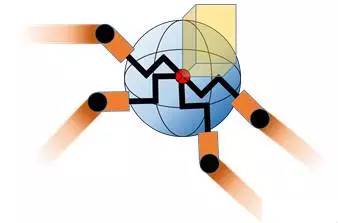
通過(guò)對(duì)球體上的點(diǎn)進(jìn)行測(cè)量,即可計(jì)算TCP。
通過(guò)使用方程減法,我們不僅可以消除未知變量R,并且可以清除方程中的所有非線(xiàn)性組分。這將會(huì)生成一組1次多項(xiàng)式方程,可以通過(guò)最小二乘法擬合進(jìn)行求解。如果采用的點(diǎn)多于4個(gè),將會(huì)產(chǎn)生更多的方程和更高的精度。
這種按部就班的方法僅需幾分鐘時(shí)間即可完成,共需進(jìn)行至少四次測(cè)量,如下所示:
總 結(jié)
Servotronix的方法快速、準(zhǔn)確、經(jīng)濟(jì),可以無(wú)需拆卸工具進(jìn)行校準(zhǔn)。該方法無(wú)需專(zhuān)用硬件,可以節(jié)省新工具安裝所需的時(shí)間和精力。機(jī)器制造商可以很方便地使用這種方法,對(duì)6自由度機(jī)器人的工具進(jìn)行快速、精確和幾乎無(wú)成本的再校準(zhǔn),從而增強(qiáng)機(jī)器人在廣泛應(yīng)用中的操作平穩(wěn)性,加快生產(chǎn)速度。
審核編輯:湯梓紅
-
傳感器
+關(guān)注
關(guān)注
2564文章
52629瀏覽量
763949 -
機(jī)器人
+關(guān)注
關(guān)注
213文章
29510瀏覽量
211644 -
TCP
+關(guān)注
關(guān)注
8文章
1397瀏覽量
80418 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3447瀏覽量
93752 -
校準(zhǔn)
+關(guān)注
關(guān)注
1文章
160瀏覽量
22215
原文標(biāo)題:【干貨】如何快速完成6自由度工業(yè)機(jī)器人的工具校準(zhǔn)?
文章出處:【微信號(hào):你身邊的機(jī)器人專(zhuān)家,微信公眾號(hào):你身邊的機(jī)器人專(zhuān)家】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
基于FPGA EtherCAT的六自由度機(jī)器人視覺(jué)伺服控制設(shè)計(jì)
工業(yè)機(jī)器人的基本結(jié)構(gòu)
工業(yè)機(jī)器人經(jīng)典好書(shū)籍——《工業(yè)機(jī)器人》
機(jī)器人的主要技術(shù)參數(shù)
【HarmonyOS HiSpark AI Camera】漁業(yè)衛(wèi)士-基于圖像識(shí)別的多自由度水下機(jī)器人
工業(yè)機(jī)器人與視覺(jué)實(shí)訓(xùn)平臺(tái)介紹
工業(yè)機(jī)器人應(yīng)用編程考核設(shè)備分享
基于Matlab的開(kāi)源六自由度協(xié)作機(jī)器人實(shí)驗(yàn)平臺(tái)
6自由度機(jī)器人 雙足竟步機(jī)器人研究報(bào)告 加代碼
工業(yè)機(jī)器人自由度的介紹及其決定因素的分析
自由度下的水下機(jī)器人控制器抗干擾設(shè)計(jì)

工業(yè)機(jī)器人的自由度含義以及其應(yīng)用
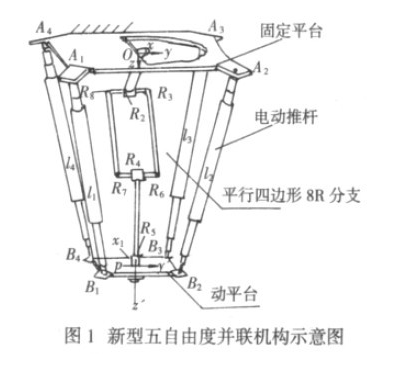
運(yùn)用BLDC對(duì)新型五自由度并聯(lián)機(jī)器人的設(shè)計(jì)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論