") 車輛動(dòng)力學(xué)模型在仿真測試中的應(yīng)用實(shí)踐
車輛動(dòng)力學(xué)模型在仿真測試中的應(yīng)用實(shí)踐
一直以來,虛擬仿真測試對算法開發(fā)起到了巨大的降本增效作用,是車載控制器開發(fā)測試中不可或缺的一環(huán)。近年來,智能駕駛得到了蓬勃發(fā)展,將虛擬仿真測試推向了一個(gè)新的高度,國內(nèi)外研究均表明,依靠實(shí)車測試已經(jīng)沒法滿足智能駕駛測試需求,虛擬仿真將成為智能駕駛開發(fā)測試的主要手段。經(jīng)緯恒潤憑借多年仿真積累,積極響應(yīng)時(shí)代變化,推出了一款車輛動(dòng)力學(xué)仿真軟件ModelBase,并依托該軟件展開介紹車輛模型建模方法、基于OpenDrive的道路編輯器開發(fā)和基于OpenScenario的場景編輯器開發(fā)。
2 車輛模型
經(jīng)緯恒潤從2004年涉足車輛虛擬仿真,無論是乘用車、商用車還是特種車輛都積累了大量的仿真經(jīng)驗(yàn),具備對車輛模型拆分以及對各個(gè)模塊建模的能力,并在長期的實(shí)踐應(yīng)用中不斷調(diào)整和優(yōu)化模型的精度。
- 乘用車、商用車、掛車車輛模型拆分方法
- 多體動(dòng)力學(xué)在車輛建模中的應(yīng)用
- 當(dāng)前常用的懸架建模方法及公式推導(dǎo)
- 通用的3D空氣動(dòng)力學(xué)模型
- 當(dāng)前常用的實(shí)時(shí)輪胎模型及公式推導(dǎo)
- 通用的動(dòng)力傳動(dòng)系統(tǒng)以及高階模型的應(yīng)用場景分析
- 基于結(jié)構(gòu)的轉(zhuǎn)向系統(tǒng)模型及功能分析
3 道路場景仿真
當(dāng)前市場上存在各式各樣的場景仿真軟件,每款軟件的優(yōu)勢和不足各不相同,如何縮短用戶選擇的時(shí)間,如何快速幫用戶快速在不同軟件之間進(jìn)行切換,場景仿真軟件需要一個(gè)統(tǒng)一的道路和場景的標(biāo)準(zhǔn),ASAM提供了高精地圖標(biāo)準(zhǔn)OpenDrive和場景標(biāo)準(zhǔn)OpenScenario,經(jīng)緯恒潤快速響應(yīng)變化,基于OpenDrive和OpenScenario標(biāo)準(zhǔn)開發(fā)了道路編輯器和場景編輯器,并且結(jié)合多年仿真經(jīng)驗(yàn)對標(biāo)準(zhǔn)進(jìn)行了擴(kuò)展,使之可適用于車輛不同系統(tǒng)仿真測試。
- OpenDrive標(biāo)準(zhǔn)解讀
- OpenScenario標(biāo)準(zhǔn)解讀
- OpenScenario中拓展動(dòng)力域、底盤域控制器測試方法
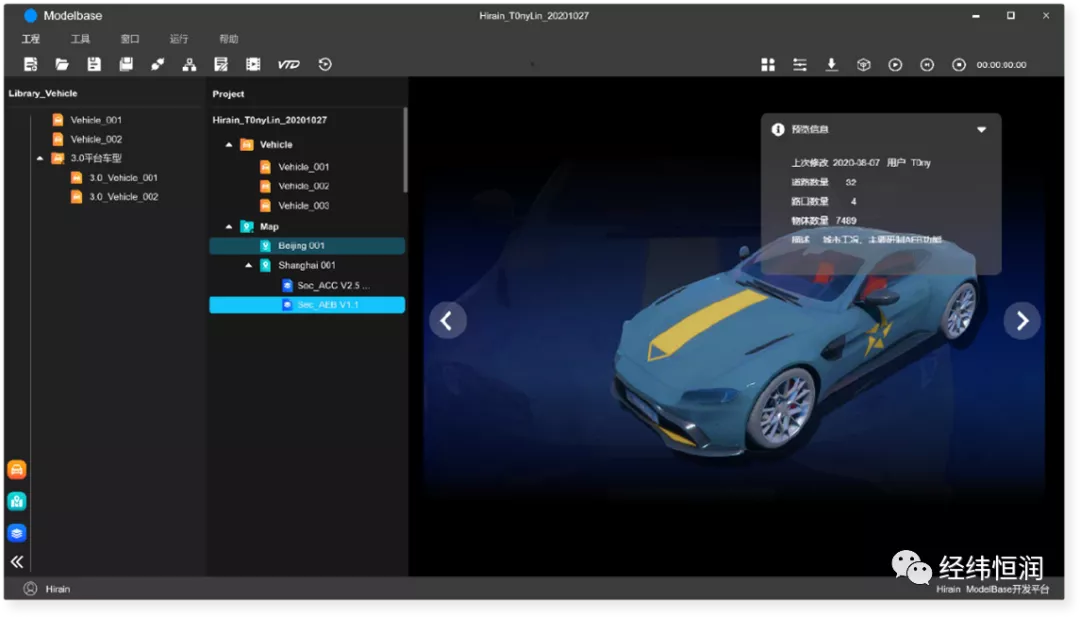
4 ModelBase軟件介紹
ModelBase是一款綜合性的車輛動(dòng)力學(xué)仿真軟件。可分別用于乘用車、商用車的整車電控系統(tǒng)的設(shè)計(jì)、測試、標(biāo)定和驗(yàn)證。可以覆蓋電控系統(tǒng)的整個(gè)開發(fā)周期,包括早期的算法仿真測試(MIL/SIL),控制器的硬件在環(huán)測試(HIL),半實(shí)物臺(tái)架測試(如電機(jī)臺(tái)架、動(dòng)力系統(tǒng)臺(tái)架、整車臺(tái)架等),以及最終的車輛在環(huán)測試(VIL)。
應(yīng)用領(lǐng)域
????整車電控系統(tǒng)的虛擬仿真測試,主要針對動(dòng)力域、底盤域、智駕域電控系統(tǒng)測試
????控制器的前期標(biāo)定,在仿真臺(tái)架上對控制器進(jìn)行參數(shù)標(biāo)定
????駕駛模擬器仿真測試,為駕駛模擬器提供逼真的駕駛環(huán)境
????車輛機(jī)械部件的開發(fā)和測試,為半實(shí)物臺(tái)架提供虛擬道路仿真環(huán)境
????車輛零部件選型分析與測試,如動(dòng)力系統(tǒng)、轉(zhuǎn)向系統(tǒng)、制動(dòng)系統(tǒng)、懸架系統(tǒng)的匹配調(diào)試
????車輛理論性能分析,如車輛動(dòng)力性、經(jīng)濟(jì)性、制動(dòng)性、操穩(wěn)性和平順性分析

-
汽車電子
+關(guān)注
關(guān)注
3036文章
8274瀏覽量
169739
發(fā)布評論請先 登錄
NVIDIA攜手Ansys和DCAI推進(jìn)流體動(dòng)力學(xué)量子算法發(fā)展
輪邊電機(jī)驅(qū)動(dòng)汽車性能仿真與控制方法的研究
《虛擬世界的力學(xué)交響曲:Adams如何重塑工業(yè)仿真邊界》
Adams多體動(dòng)力學(xué)仿真解決方案全面解析
輪轂電機(jī)驅(qū)動(dòng)電動(dòng)汽車垂向動(dòng)力學(xué)控制研究綜述
航空發(fā)動(dòng)機(jī)整機(jī)動(dòng)力學(xué)有限元模型建立方法
【Simcenter STAR-CCM+】通過快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

智能駕駛HIL仿真測試解決方案

安泰功率放大器在軌道車輛振動(dòng)壓電俘能結(jié)構(gòu)中的應(yīng)用
Simcenter STAR-CCM+車輛外部空氣動(dòng)力學(xué)特性——通過快速準(zhǔn)確的CFD仿真加速空氣動(dòng)力學(xué)創(chuàng)新

PT500齒輪傳動(dòng)動(dòng)力學(xué)綜合測試實(shí)驗(yàn)臺(tái)
關(guān)于動(dòng)力學(xué)方程能否用matlab進(jìn)行傅里葉變換的問題。
圓滿收官|(zhì) Aigtek參展第二屆波動(dòng)力學(xué)前沿與應(yīng)用學(xué)術(shù)會(huì)議載譽(yù)歸來!

自動(dòng)駕駛聯(lián)合仿真——功能模型接口FMI(終)

車輛動(dòng)力學(xué)仿真模型的可信度評估方法






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論