 i.MX 8M Mini——四核Cortex-A53+Cortex-M4多核CPU如何實現工控
i.MX 8M Mini——四核Cortex-A53+Cortex-M4多核CPU如何實現工控

隨著ARM處理器性能不斷增強,當前越來越多產品都傾向盡量用單一架構的高性能ARM平臺來滿足產品的不同功能要求。但是,在工業應用領域還是要面對一些實時控制和通訊的要求,單一系統架構無法完全滿足。面對復雜的工業應用場景,創龍科技推出了基于NXP i.MX 8M Mini設計的工業核心板和評估板,提供了四核Cortex-A53 + 單核Cortex-M4異構多核的組合使用方法,使Cortex-M4發揮出MCU實時控制性的特性,從而滿足復雜的工業應用場景。
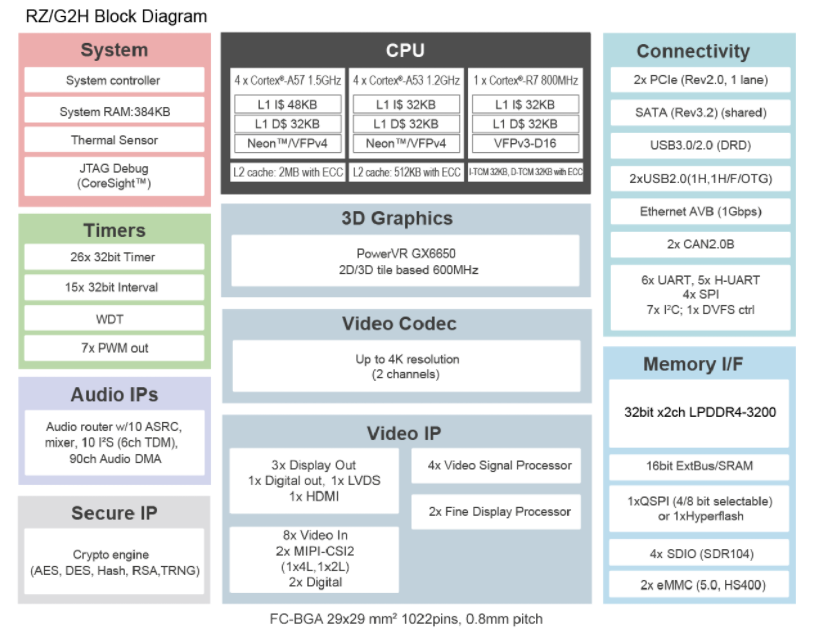
NXP i.MX 8M Mini是一款集成4核ARM Cortex-A53 + 單核ARM Cortex-M4的異構多核SoC處理器。Cortex-A53核主頻高達1.6GHz,運行Linux系統,可實現復雜的人機交互和高速運算等應用要求。Cortex-M4核運行裸機或FreeRTOS系統,實現實時控制和通訊的任務,比如:電機實時控制、IO實時控制、串口通訊、與FPGA通過FLexSPI實時通訊等。
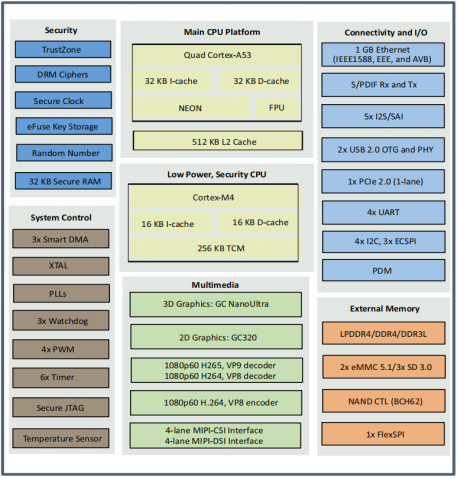
圖 1 i.MX 8M Mini處理器資源框圖
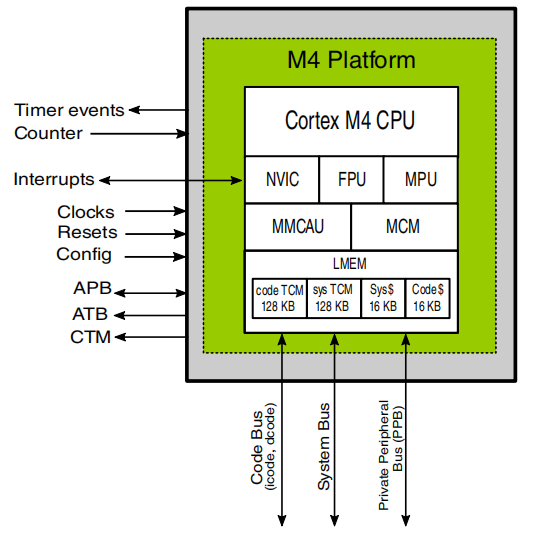
圖 2 i.MX 8M Mini Cortex-M4資源框圖
1.1 案例功能
(1) Cortex-A53釋放Cortex-M4,然后初始化RPMsg,并創建端點。
(2) Cortex-A53啟動Linux系統,執行握手服務,創建通信信道,并發送一條信息至Cortex-M4。
(3) Cortex-M4接收到第一條信息時,計數器自加1,然后回發計數器值至Cortex-A53。
(4) Cortex-A53接收Cortex-M4發送的計數器數值,計數器自加1,然后回發計數器數值至Cortex-M4。
(5) 當計數器數值大于100時,通信結束。
1.2 案例測試
案例bin目錄下分別提供了TCM版本程序鏡像文件rpmsg_lite_pingpong_rtos_linux_remote.bin和DDR版本程序鏡像文件rpmsg_lite_pingpong_rtos_linux_remote_ddr.bin。
在U-Boot命令行加載運行Cortex-M4程序鏡像文件后,RS232 UART4調試串口打印如下信息。

圖 3
運行boot命令,在Cortex-A53啟動運行Linux系統。
U-Boot=>boot
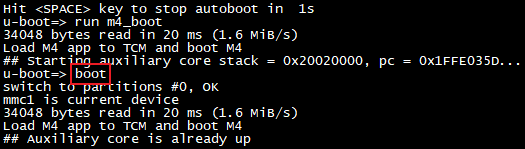
圖 4
進入評估板文件系統后,執行如下命令加載imx_rpmsg_pingpong模塊,啟動核間通信。
Target#modprobe imx_rpmsg_pingpong
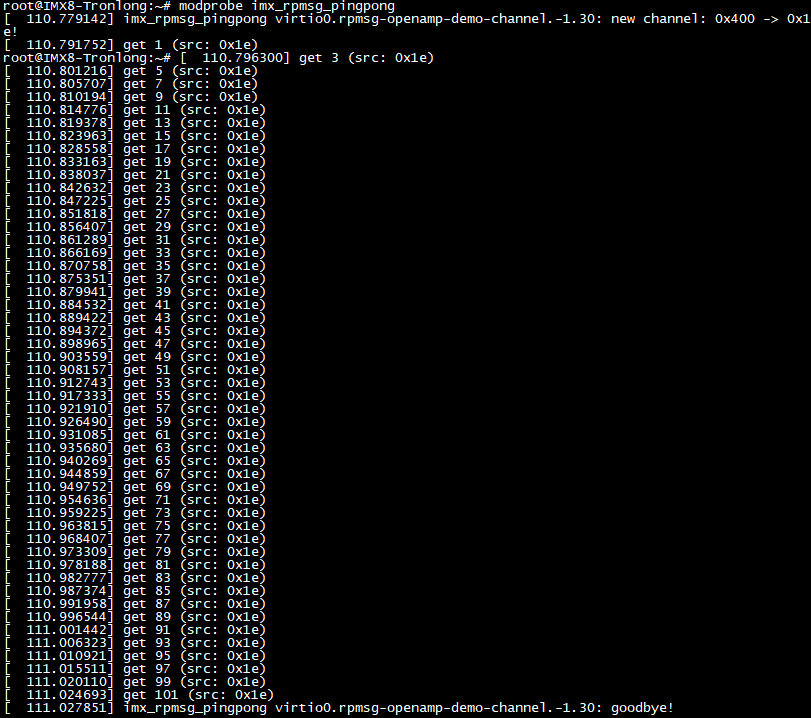
圖 5
加載模塊后,Cortex-M4將接收Cortex-A53發送的數據,并將其轉發回Cortex-A53,循環50次后結束。RS232 UART4調試串口打印信息如下。
圖 6
圖 7
1.3 關鍵代碼
Linux驅動程序
驅動的實現在imx_rpmsg_pingpong.c中完成,此文件位于內核"drivers/rpmsg/"路徑下。
(1) Linux系統加載驅動后,先發送一條helloMsg,然后發送第一條乒乓信息。
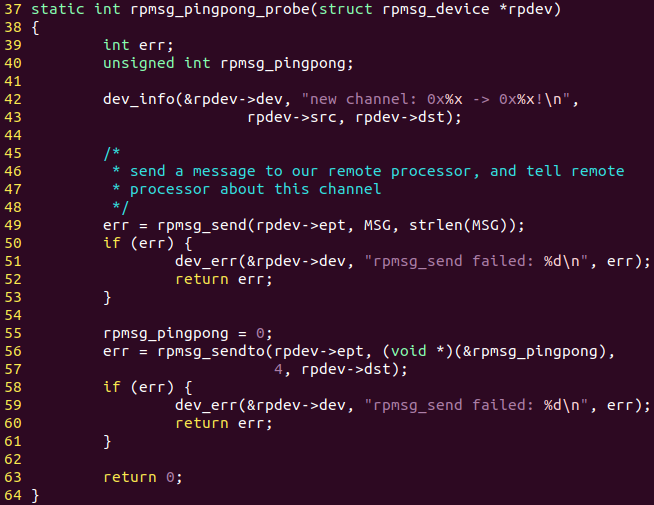
圖 8
(2) 在回調函數中,每次接收到Cortex-M4的計數器數據后自加1,并回發至Cortex-M4,直到計數器數值大于100。

圖 9
FreeRTOS程序
程序主體位于main函數中,定義位于main_remote.c中。
(1) 在main函數中首先初始化引腳等相關資源,然后創建app_task任務,并啟動任務列表。
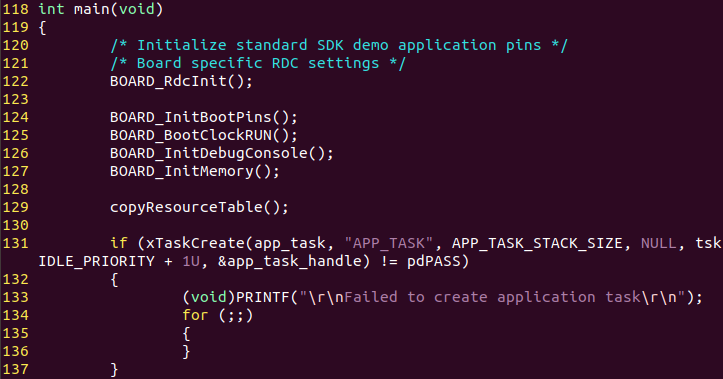
圖 10
(2) 在app_task任務中定義共享內存基地址,需和設備樹中指定地址一致,再初始化RPMsg資源,并等待連接上遠程終端。
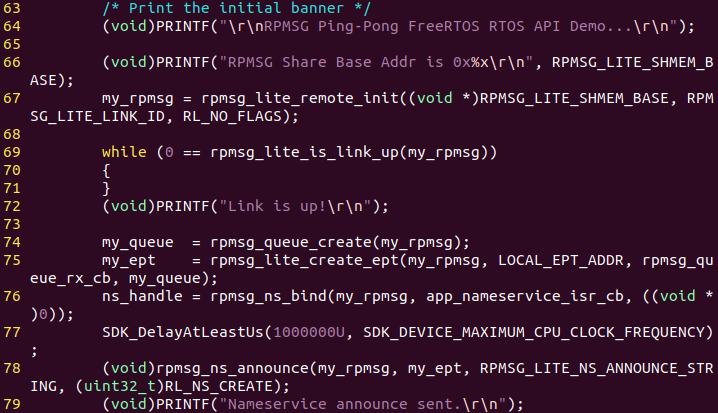
圖 11
(3) 接收helloMsg,并循環收發乒乓信息。

圖 12
(4) 信息以乒乓形式結束后注銷RPMsg相關資源,并進入死循環。
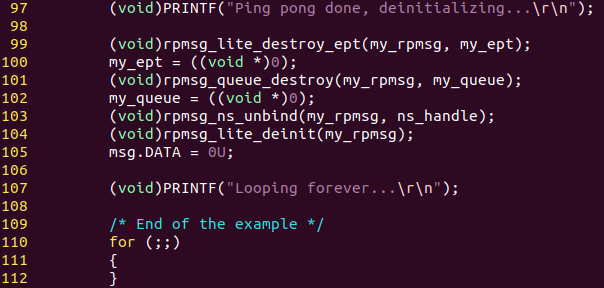
圖 13
2 rpmsg_lite_str_echo_rtos案例
2.1 案例功能
(1) Cortex-A53釋放Cortex-M4,然后初始化RPMsg,并創建端點。
(2) Cortex-A53啟動Linux,執行握手服務,并創建通信信道。
(3) Linux驅動生成"/dev/ttyRPMSG30"節點,將用戶輸入至該節點的數據發送至Cortex-M4。
(4) Cortex-M4接收數據并進行打印,再將數據回發至Cortex-A53。
(5) Cortex-A53(Linux驅動)接收數據并進行打印。
2.2 案例測試
案例bin目錄下分別提供了TCM版本程序鏡像文件rpmsg_lite_str_echo_rtos.bin和DDR版本程序鏡像文件rpmsg_lite_str_echo_rtos_ddr.bin。
在U-Boot命令行加載運行Cortex-M4程序鏡像文件后,RS232 UART4調試串口打印如下信息。

圖 14
運行boot命令,在Cortex-A53啟動運行Linux系統。
U-Boot=>boot
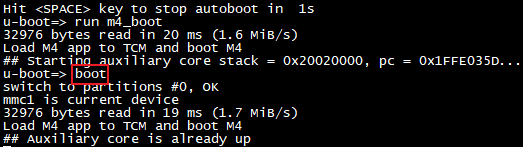
圖 15
進入評估板文件系統后,執行如下命令加載imx_rpmsg_tty模塊,啟動核間通信。
Target#modprobe imx_rpmsg_tty

圖 16
Linux系統加載模塊后,會發送數據"hello world"至Cortex-M4。Cortex-M4接收到數據后,在RS232 UART4調試串口將數據進行打印。

圖 17
在USB TO UART2調試串口執行如下命令,將接收到的數據發送至Cortex-M4。
Target#echo tronlong > /dev/ttyRPMSG30

圖 18
Cortex-M4接收到數據后,在RS232 UART4調試串口將數據進行打印,同時將數據回發至Cortex-A53。
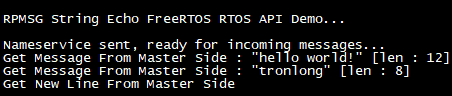
圖 19
在USB TO UART調試串口執行如下命令,可查看Cortex-M4回發的數據。
Target#dmesg | grep rpmsg_tty

圖 20
2.3 關鍵代碼
Linux驅動程序
驅動的實現在imx_rpmsg_tty.c中完成,此文件位于內核"drivers/rpmsg/"路徑下。
(1) imx_rpmsg_tty.c的寫函數實現數據的發送,發送緩存最大設置為256Byte。

圖 21
(2) 在回調函數中,每次接收到Cortex-M4的數據后,都以16進制的方式進行打印,打印等級為KERM_DEBUG。
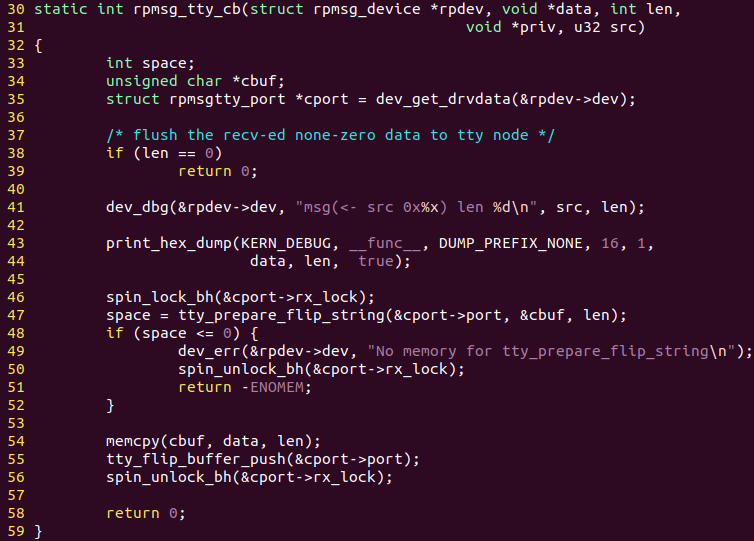
圖 22
FreeRTOS程序
程序主體位于main函數中,定義位于main_remote.c中。
(1) 在main函數中初始化引腳等相關資源,然后創建app_task任務,并啟動任務列表。

圖 23
(2) 在app_task任務中定義共享內存基地址,需和設備樹中指定地址一致,再初始化RPMsg資源,并創建通信終端。
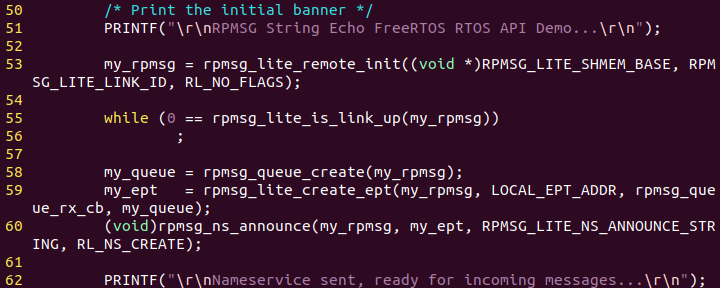
圖 24
(3) 在for循環中實現數據收發。
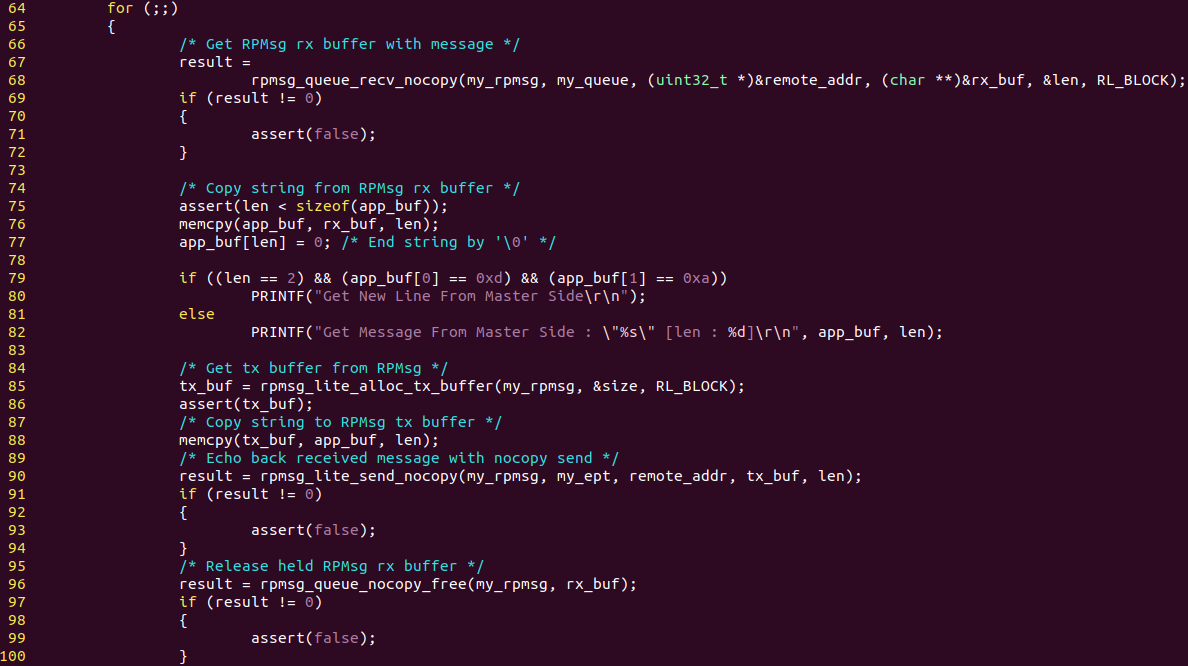
圖 25
IMX8 Cortex-A53與Cortex-M4多核通信開發案例是創龍科技(Tronlong)基于NXP i.MX 8M Mini處理器設計的工業評估板——TLIMX8-EVM上實現的,它由核心板+底板構成,用戶使用核心板進行二次開發時,僅需專注上層運用,降低了開發難度和時間成本,可快速進行產品方案評估與技術預研。
IMX8 Cortex-A53與Cortex-M4多核通信開發案例是創龍科技(Tronlong)基于NXP i.MX 8M Mini處理器設計的工業評估板——TLIMX8-EVM上實現的,它由核心板+底板構成,用戶使用核心板進行二次開發時,僅需專注上層運用,降低了開發難度和時間成本,可快速進行產品方案評估與技術預研。
-
FPGA
+關注
關注
1644文章
22002瀏覽量
615892 -
ARM
+關注
關注
134文章
9330瀏覽量
375926 -
嵌入式
+關注
關注
5144文章
19584瀏覽量
315985
發布評論請先 登錄
【飛凌嵌入式】基于i.MX9352開發板M核的FreeRTOS設計例程

米爾NXP i.MX 91核心板發布,助力新一代入門級Linux應用開發
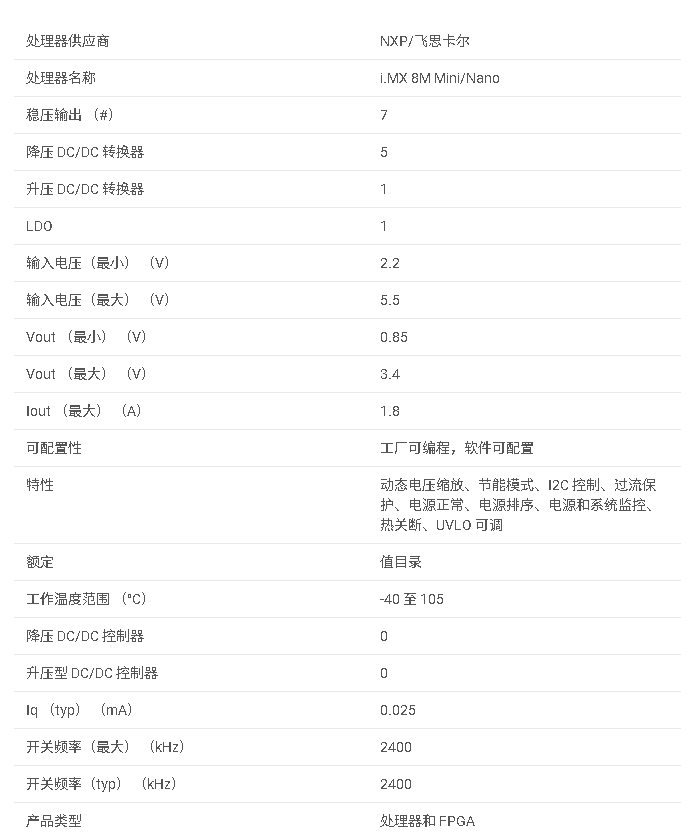
TPS6521825 適用于 NXP i.MX 8M mini 的電源管理 IC數據手冊
如何禁用i.MX RT1170 MCU中的M4內核?
如何在i.MX 8XDXL EVK的A35上運行Yocto Linux,在M4上運行FreeRTOS?
i.MX8MMini中的Cortex-M4不支持SDIO嗎?
帶四核Arm Cortex-A57和四核Arm Cortex-A53 CPU的RZ/G2H超高性能微處理器數據手冊
分享!基于NXP i.MX 8M Plus平臺的OpenAMP核間通信方案
2.3T算力,真的強!1分鐘學會NPU開發,基于NXP i.MX 8MP平臺!
基于AR1335和i.MX8MP的視覺方案

使用TPS6521825和LP873347 PMIC為NXP i.MX 8M Mini和Nano供電

【北京迅為】《i.MX8MM嵌入式Linux開發指南》-第四篇 嵌入式Linux系統移植篇-第六十七章 Uboot編譯及移植





 工商網監
工商網監
評論