") 「智科特案例」用VR,我們?nèi)祟愂职咽纸虣C器人做事情
「智科特案例」用VR,我們?nèi)祟愂职咽纸虣C器人做事情

前言
19年10月的時候,豐田研究院(toyota research institute)發(fā)布了一個視頻,其中有一個片段是人類對機器人實行VR示教。

VR機器人示教
眾所周知的是,豐田研究院專注于家庭服務(wù)機器人的理論與實際工程驗證,是工程能力和研究能力雙修,有錢有閑的機構(gòu)之一。我們覺得這個功能挺有意思的,于是也做了一個VR手把手教CasterMoma做事情的案子。
系統(tǒng)構(gòu)成
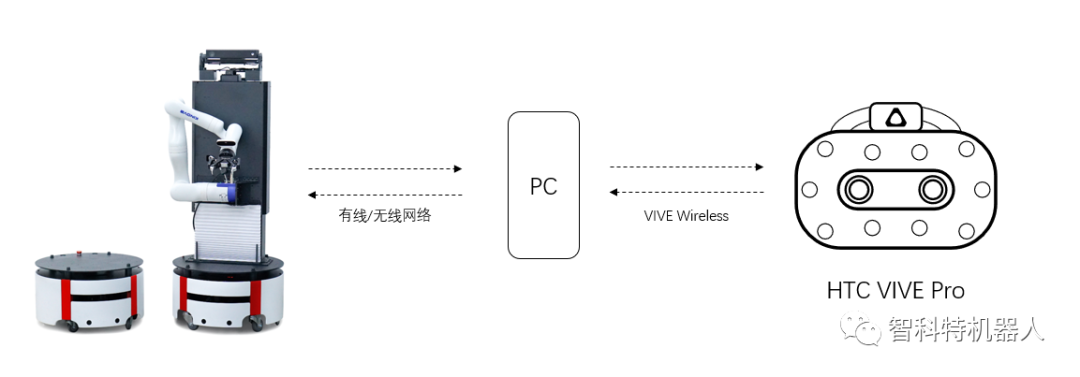
系統(tǒng)主要由一臺移動操作機器人(CasterMoma),一套虛擬現(xiàn)實頭顯(HTC Vive Pro),還有一臺中控電腦構(gòu)成。
機器人把深度攝像頭的點云圖像數(shù)據(jù),與機器人的狀態(tài)信息發(fā)送到PC上,PC把圖像信息發(fā)送到頭顯中顯示。中控電腦接收控制器的指令后,下發(fā)控制機器人運動。
主要功能
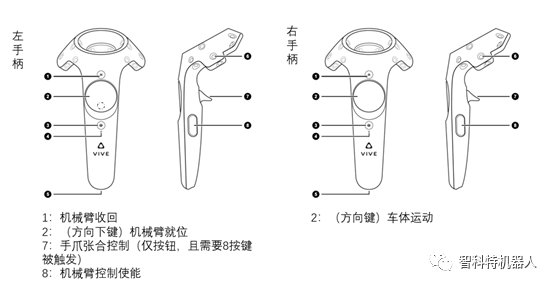
鑒于VR頭顯手柄的按鍵非常豐富,很適合用于控制移動操作機器人這樣類型的,多可控對象的機器人。我們使用左手柄控制機械臂,右手柄控制移動機器人,機器人頭部就用VR頭顯的追蹤功能,跟隨人的頭部運動。
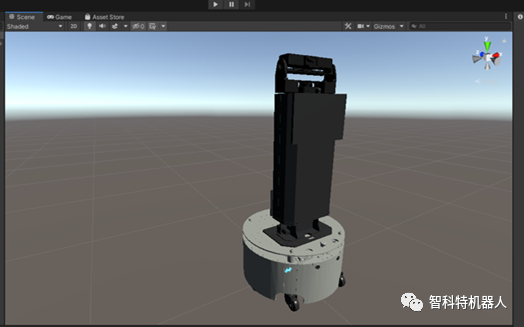
我們在Unity中,也搭建了一套CasterMoma的模型。我們在VR視角中,也能完全看到CasterMoma在我們?nèi)说恼胺健?/span>
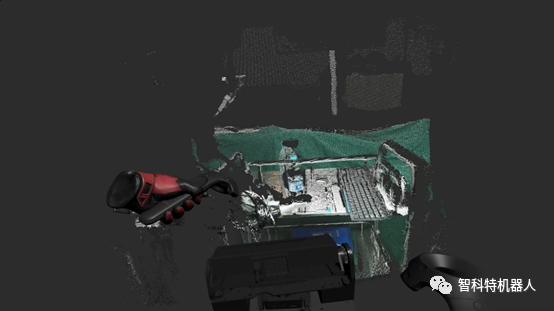
用戶可以通過頭部的運動,控制相機云臺獲取不同角度的視野,同時通過手柄來操控機械臂,以及車體運動。
在日趨復(fù)雜的機器人任務(wù)中,通過VR遙操作機器人完成任務(wù),一方面可以達到示教的目的,另一方面可以減少執(zhí)行任務(wù)的危險性。這套功能也方便移植到其它的移動操作機器人上。
功能演示視頻
以下是我們遙操作機器人進行水瓶抓取的視頻。
謝謝閱讀

北京智科特機器人是一家專業(yè)研發(fā)、集成、銷售高性能、高穩(wěn)定性的機器人專業(yè)技術(shù)公司。我們的愿景是成為國內(nèi)一流研究型機器人本體科研解決方案服務(wù)提供商與機器人在垂直細(xì)分領(lǐng)域的落地者和傳播者。通過滿足廣大用戶的多樣性需求,基于用戶的多樣性反饋中研發(fā)與迭代產(chǎn)品,讓機器人技術(shù)造福更多領(lǐng)域。
-
機器人
+關(guān)注
關(guān)注
213文章
29603瀏覽量
212133
發(fā)布評論請先 登錄
手把手教你如何調(diào)優(yōu)Linux網(wǎng)絡(luò)參數(shù)
手把手教程:基于RT-Thread在單片機上部署大模型AI終端

KiCad直播活動(三):在 Windows上編譯KiCad 手把手教您編譯/構(gòu)建 KiCad 源碼

家用才是智能時代機器人巨大的細(xì)分場景

《零基礎(chǔ)開發(fā)AI Agent——手把手教你用扣子做智能體》
《手把手教你做星閃無人機》即將開播,鎖定15日晚七點!

《手把手教你做PC》課程即將啟動!深開鴻引領(lǐng)探索KaihongOS筆記本電腦開發(fā)實戰(zhàn)
Air780E模組LuatOS開發(fā)實戰(zhàn) —— 手把手教你搞定數(shù)據(jù)打包解包

什么是拖動示教?機器人拖動示教方式分析

協(xié)作機器人拽拖示教詳解
焊接機器人示教模式怎么設(shè)置






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論