 編碼器與正交譯碼器
編碼器與正交譯碼器
我想提出一個關于PicoScope7新的譯碼器功能討論。它已經推出一段時間,但你可能不知道這在汽車領域是扮演相當重要的角色。
正交譯碼器被用在轉子位置傳感器來轉換關于旋轉軸角度及方向的信息。
舉例來說,它在電機上采用一對二進制的信號型式。
這種傳感器已經在電機使用一段時間了且我們可以譯碼這些信號來判斷當電機轉動時,ECU正在讀取什么數據。以下圖片是一臺奔馳B-Class裝載特斯拉電機之數據。這個傳感器有兩個方波輸出。我也將電池的電流信息加進來讓我更清楚電機轉動的時間。
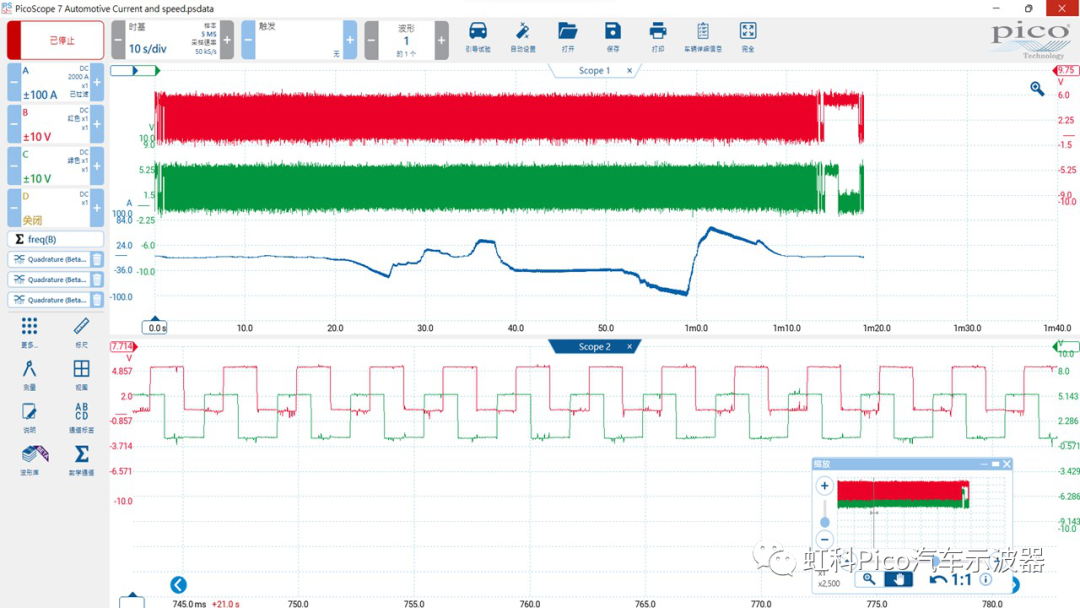
編碼器會基于這兩個信號的交替相應來判斷軸的速度與旋轉方向。我們在設定這個正交譯碼器時,有些規則需要先了解:哪個信號是領先信號?轉子旋轉一圈的脈沖數是多少?
然而我很快發現這個信息并不容易取得。但這不應該阻止我們用此譯碼器。
將譯碼器加入你的捕獲信息,點擊 更多>串型譯碼并選擇正交(Quadrature)


在配置設定里,你需要設定譯碼器要在哪些通道找到這些適用數據。

- 在舉例中,相關信息位于通道B與C。
- 這個信號的幅值約于0-5V。選擇3V的閥值讓我們較靠近信號的中間值,讓正交點更清晰。因為正交點清晰所以滯后量在此并不是很重要,所以采用軟件自動設定的數值即可。第二個信號也需要添加進去并采用類似的設定!
- 顯示設置(Display settings)有幾個選項:速度、位移量及時脈轉換。對于此情況應用,我們通常采用速度。
- 旋轉每圈的脈沖數(Pulses per revolution)默認值為24。如果你可以找到這個信息則可以修改并采用,否則就保持預設值。這也表示你從譯碼器捕獲到的速度值并不一定代表編碼器監控軸的速度值。
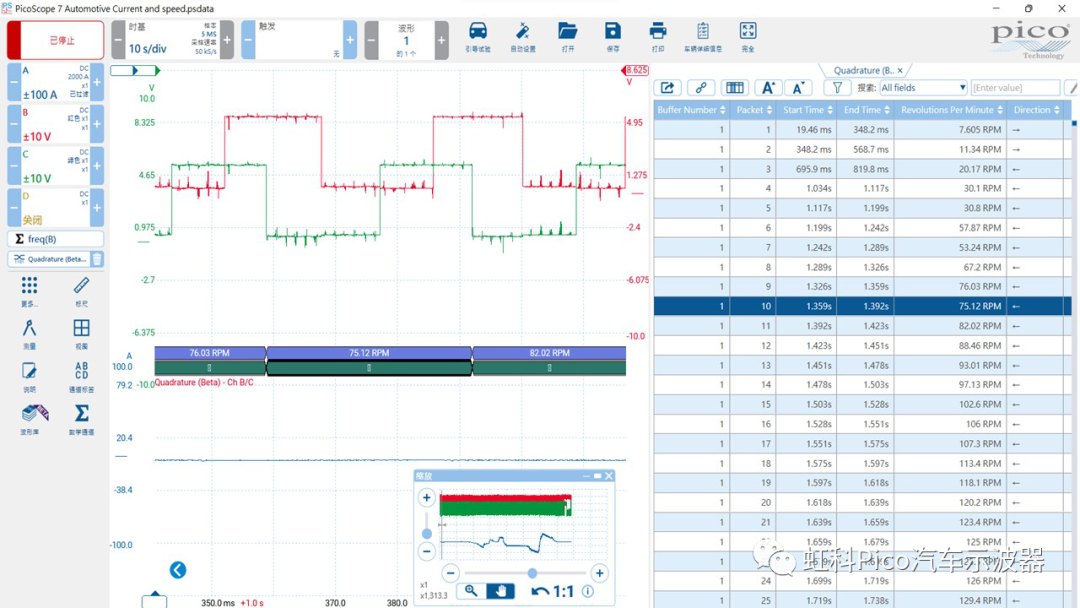
- A領先B(A leads B is):此為設定你的兩個信號哪一個為領先信號。你會有關于順時鐘與逆時鐘的選項。這部分可能也不容易知道,但是只要添加譯碼器到圖中后,你將會在表格中看到方向箭頭。它會由你定義,但它取決于你如何正轉或反轉電機,哪一邊是正轉可以明顯地觀察出來。
- 速度單位:此部分也有一些選項,我們最常使用的是RPM。
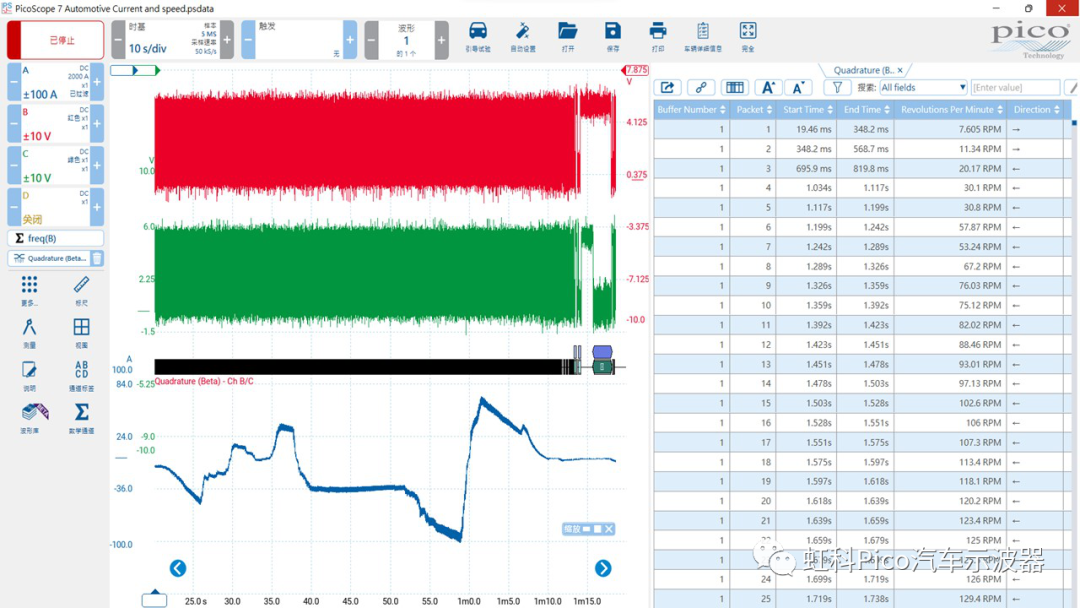
譯碼器數據將出現在屏幕下方,與所有PicoScope的譯碼器皆相同,但我已經將它移到一旁來使它更容易觀看。
如同你所看到的,我們在表格上得到了速度與旋轉方向數據。如果你雙擊表格上的條列數據,它將帶你到圖中的相關波型區域。
從這個表格,你可以看出前兩個數據包有不同的旋轉方向。當我們捕獲此信號時,我們在驅動車輛向前行駛前先輕微倒退了一下。你可以藉由改變A領先B的轉動方向定義來修改譯碼器的旋轉方向數據。
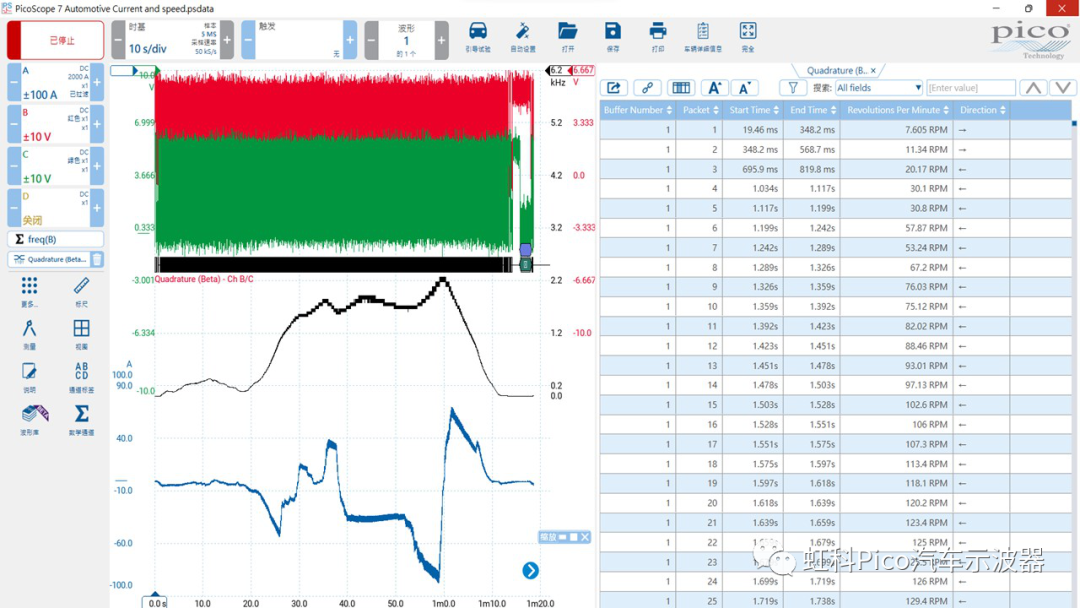
最后,因為信號中的頻率改變會影響速度之數據,我們可以添加一個頻率的數學通道給其中一個或兩個信號來顯示軸的速度變化量。
我希望這在某種程度上有幫助,如果你有任何關于正交譯碼器的反饋,請讓我知道。
By PicoAuto – Ben Martins
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編碼器
+關注
關注
45文章
3784瀏覽量
137466
發布評論請先 登錄
相關推薦
熱點推薦
軸編碼器與無軸承編碼器,到底如何選擇?
在選擇軸編碼器與無軸承編碼器時,需要根據具體的應用場景、性能需求、環境條件和成本預算等因素進行綜合考慮。以下是對兩者的詳細對比,以幫助做出合適的選擇: 一、工作原理與結構 1. 軸編碼器

伺服電機編碼器怎么選型
伺服電機編碼器的選型是一個綜合性的過程,需要考慮多個因素以確保所選編碼器能夠滿足系統的性能要求。以下是一些關鍵的選型步驟和考慮因素: 一、明確應用需求 首先,需要明確伺服電機編碼器的應用需求,包括

DISCOAA編碼器性質特點
DISCOAA編碼器的具體詳細資料或參數 ?。不過,我們可以根據編碼器的通用知識和一些相關信息來概述編碼器的一般特點和類型。 編碼器通常用于將機械運動或位置轉換為電信號,以便進行監測、
DISCOAA編碼器類型功能
DISCOAA編碼器可能包括絕對編碼器和增量編碼器兩種類型,其主要功能是將輸入信號進行分析和處理,并將其轉換為數字信號 ?。 關于類型,雖然搜索結果中并未直接提及DISCOAA編碼器的

編碼器與譯碼器:功能、原理及應用解析
在數字電子技術的浩瀚星空中,編碼器和譯碼器如同兩顆璀璨的星辰,它們各自扮演著至關重要的角色,共同編織著信息傳輸與處理的精密網絡。今天,就讓我們一同深入探索這兩者的奧秘,揭開它們如何在現代電子系統中發
磁編碼器工作原理解析 磁編碼器與光編碼器的比較
磁編碼器工作原理解析 磁編碼器是一種利用磁場變化來測量角度和位置的傳感器。它的工作原理基于霍爾效應或磁阻效應。以下是磁編碼器的基本工作原理: 磁場產生 :磁
增量編碼器與絕對值編碼器的區別
增量編碼器與絕對值編碼器的區別:增量編碼器與絕對值編碼器在精度特點對比
增量編碼器的精度取決于脈沖的數量和測量的細分程度,通常情況下,其精度

二進制編碼器與絕對編碼器的區別
編碼器是工業自動化和機器人技術中不可或缺的組件,用于將機械位置或運動轉換為電信號。二進制編碼器和絕對編碼器是兩種常見的編碼器類型,它們各自有著獨特的特點和應用場景。 二進制
增量編碼器和絕對值編碼器是什么
工業編碼器是一類傳感器,是在工業自動化閉環控制和數字化轉型物理感知重要的傳感器。關于傳感器的宣傳已很多,但是對于編碼器這么重要的傳感

38譯碼器原理圖怎么連線
38譯碼器(3-to-8解碼器)是一種數字邏輯電路,它將3位二進制輸入信號轉換成8種可能的輸出信號。這種譯碼器廣泛應用于數字系統中,用于控制多個設備的開關狀態,如LED顯示、多路選擇器
磁電編碼器和光電編碼器的區別
磁電編碼器和光電編碼器是兩種不同類型的編碼器,它們在原理、結構、性能和應用領域上都有所不同。 磁電編碼器和光電編碼器的區別 1. 引言
伺服電機編碼器種類有哪些?
伺服電機編碼器分很多種,有直接轉速型編碼器、有位置分辨率型編碼器、有高精度位姿編碼輸出和高靈敏度位移測量等類型。下面我們來了解一下伺服電機編碼器
譯碼器、寄存器及‘&’取地址符的物理層知識
一、3位二進制數,可表達2^3=8種狀態,這是38譯碼器。本質上它用較少的數據位(3bit)組合出(有叫指定)較多的數據(8種組合),我們把較少數據位的這種‘碼’換個名稱“地址”。
1、 38
發表于 07-05 10:22





 工商網監
工商網監
評論