 【技術分享】在M3568上移植ePort-G驅動及調試技巧
【技術分享】在M3568上移植ePort-G驅動及調試技巧
產品上網口沒有顯示?無法進行ping命令?速度拉跨?還經常丟包?那一定是漏掉了什么細節了,看看下面操作,說不定能夠幫到你。
 ?網口驅動移植的準備
?網口驅動移植的準備
本次我們使用的平臺是致遠電子M3568系列核心板,網口模塊是致遠電子ePort系列的ePort-G型號產品,速率可達千兆,而且簡化硬件設計,縮短開發時間。
配置網口驅動時,我們得先了解原理圖中網口對應的模式以及地址,確認好用到的引腳,方便之后的設備樹配置,如下圖參考:
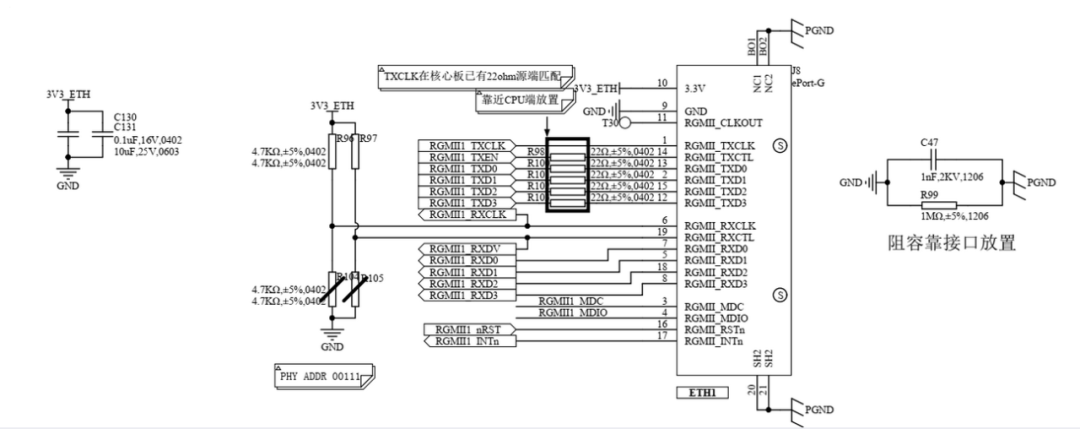
可以看到我們要使用的物理地址及PHY的工作模式,同時也要注意電壓的配置,與硬件工程師確認網口模塊所需要的IO電壓,根據需求不同去配置電源域(3.3V或1.8V)。
?驅動程序的移植及設備樹的修改
調試之前需要根據官方說明去修改drivers/net/phy下的Makefile和Kconfig,然后將官方的驅動拷貝到該目錄下。或者直接修改Makefile將該驅動文件編譯到內核,不修改Kconfig,這樣就不用make menuconfig去勾選上網口驅動。之后在RK平臺下調整設備樹部分,由于ePort-G該網口型號支持千兆,官方說明千兆時鐘應設為125M,如下參考(注:其他如復位引腳和設置pinctrl的引腳未寫出),根據原理圖實際配置來修改設備樹。
&gmac1 { phy-mode = "rgmii"; //PHY接口模式 clock_in_out = "output"; //時鐘輸入輸出方向,該為MAC輸出給PHY,input則相反 //設置千兆所需要的時鐘 assigned-clocks = <&cru SCLK_GMAC0_RX_TX>, <&cru SCLK_GMAC0>; assigned-clock-parents = <&cru SCLK_GMAC0_RGMII_SPEED>, <&cru CLK_MAC0_2TOP>; assigned-clock-rates = <0>, <125000000>;
//根據PCB布線不同修改值 tx_delay = <0x21>; rx_delay = <0x2f>;
phy-handle = <&rgmii_phy0>; status = "okay";};&mdio1 { rgmii_phy1: phy@2 { compatible = "ethernet-phy-ieee802.3-c22"; reg = <7>; //PHY的物理地址,原理圖上有標出 };}
之后編譯內核,查看drivers/net/phy下有無生成對應驅動的.o文件,若驅動程序在編譯過程出現報錯,可能要根據自己內核版本去修改官方的驅動程序,將一些沒有的函數屏蔽或替換。編譯完成后將boot.img燒錄到開發板上(內核和設備樹)。
 查看網口是否配置成功及網口調試
查看網口是否配置成功及網口調試
1. 配置檢查
進入開發板,查看sys/bus/mdio_bus/下面的drivers和devices,分別進入查看是否在devices中生成對應節點以及查看devices下的phy_id是否與驅動程序中自己網口型號的phy_id一致,如果沒有出現對應節點情況檢查設備樹中compatible的屬性,如果還不一致則將iee部分改成id+網口型號的phy_id。如下圖: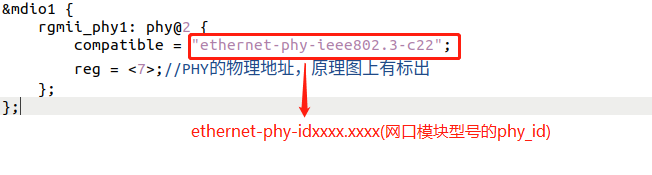
輸入命令ifconfig ethx dowm和ifconfig ethx up(x為網口號)檢查是否能正常起來,嘗試更改設置ip地址,連接網線進行ping命令查看可否通同一網段下的網線另一端地址。
2. 網口調試
在ping通外網之后可以嘗試使用iperf3來進行網絡測試,測試通過iperf3功能從板子做服務器接收速度和板子做客戶端發送速度的數據來觀測是否達到要求。如下圖:
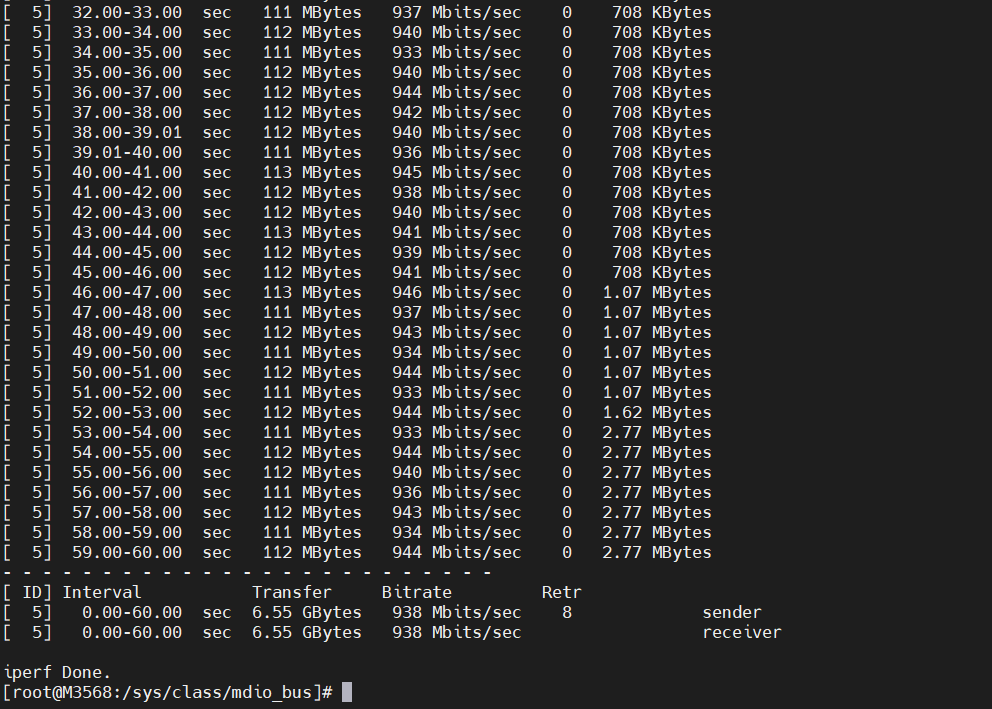
當然,也可能存在丟包情況,這種情況需要適當的調整MAC的tx_delay和rx_delay,也可以通過在驅動程序中調整寄存器值的方式來控制phy的tx_delay和rx_delay,一般調整MAC。通過RK平臺下中/sys/device/platform/fe….ethernet/rgmii_delay可以調試修改tx_delay和rx_delay,輸入命令echo 0x2a 0x26 > rgmii_delay(第一個延遲參數為tx,第二個為rx),修改的數值可以根據該目錄下的phy_ld_scan工具來查看。拔掉網線,輸入命令echo 1000> phy_ld_scan后,如下圖所示:
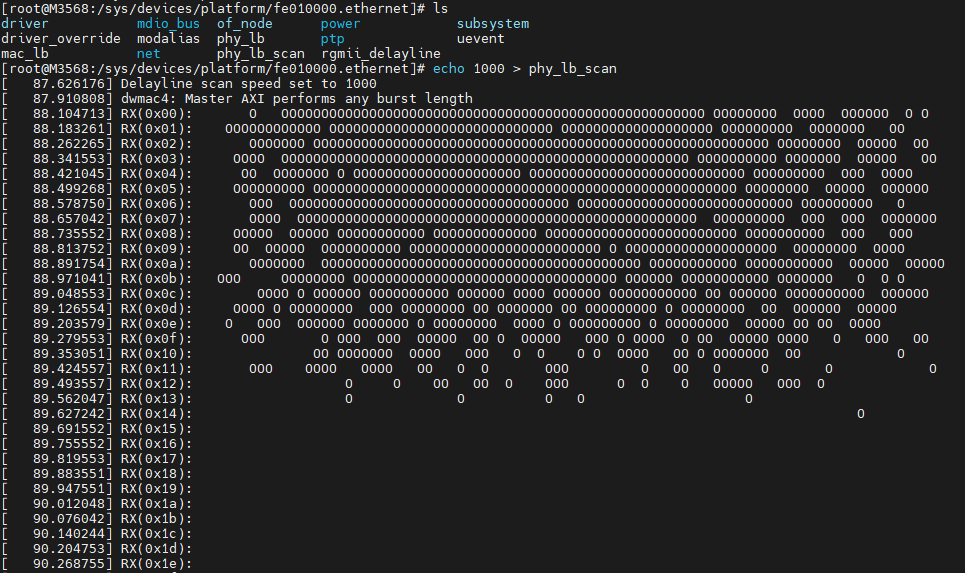
有0的表示通路,根據橫(TX的延時)縱(RX的延時)坐標來觀察出TX和RX的延時應設置為多少。如果根本沒有0或者0很少的情況則考慮下硬件走線是否過長導致。
-
驅動
+關注
關注
12文章
1906瀏覽量
86583 -
核心板
+關注
關注
5文章
1118瀏覽量
30658
發布評論請先 登錄
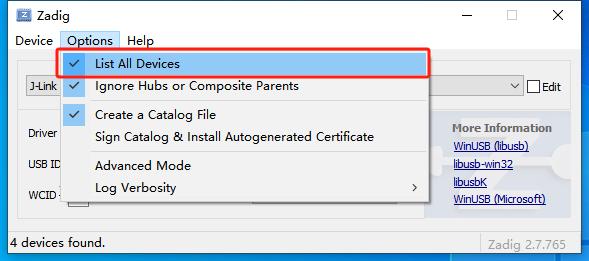
硬件調試:JLink 驅動配置與調試技巧
RK3568驅動指南|第十二篇 GPIO子系統-第130章 GPIO的調試方法
基于EPCM3568B-LI的無線模塊應用 — 4G篇

北京迅為RK3568開發板OpenHarmony系統南向驅動開發內核HDF驅動框架架構
技術分享 | RK3568編譯第三方驅動

【北京迅為】iTOP-RK3568OpenHarmony系統南向驅動開發GPIO基礎知識
【米爾-國產瑞芯微RK3568開發板試用體驗】評測一 系統配置
為什么M3568核心板上由四個連接器,卻有黑白兩種顏色?
Openharmony軟件評估指南-米爾瑞芯微RK3568開發板
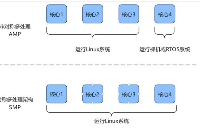
混合部署 | 在RK3568上同時部署RT-Thread和Linux系統-迅為電子





 工商網監
工商網監
評論