") 【新品發(fā)布】ZMC600E EtherCAT主站控制器全新上市
【新品發(fā)布】ZMC600E EtherCAT主站控制器全新上市






聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
控制器
+關(guān)注
關(guān)注
114文章
17100瀏覽量
184231 -
cat
+關(guān)注
關(guān)注
1文章
75瀏覽量
21598
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
基于米爾安路飛龍派FPGA FPSoC+移植SOEM實現(xiàn)EtherCAT主站控制功能
on-chip RAM,內(nèi)存接口和豐富的外設(shè)互聯(lián)接口,定位復雜嵌入式系統(tǒng)、低功耗和高性能芯片市場。
DR190M芯片的PS端有兩個以太網(wǎng)控制器,基于以太網(wǎng)的功能,可以實現(xiàn)EtherCAT主站
發(fā)表于 07-11 19:49
EtherCAT主站轉(zhuǎn)Profinet網(wǎng)關(guān)接匯川伺服操作模式的控制解析
與設(shè)備間搭建了標準化橋梁。當需要將采用EtherCAT協(xié)議的從站設(shè)備(如伺服驅(qū)動器等)與Profinet主站設(shè)備(如西門子

先輯半導體HPM6E00系列產(chǎn)品能用來做EtherCAT的主站嗎
雖然明確說明了先輯半導體HPM6E00系列產(chǎn)品能用來做EtherCAT的從站,但它可以用來做主站嗎,還是說必須用其他芯片做主站呢
發(fā)表于 03-16 10:16
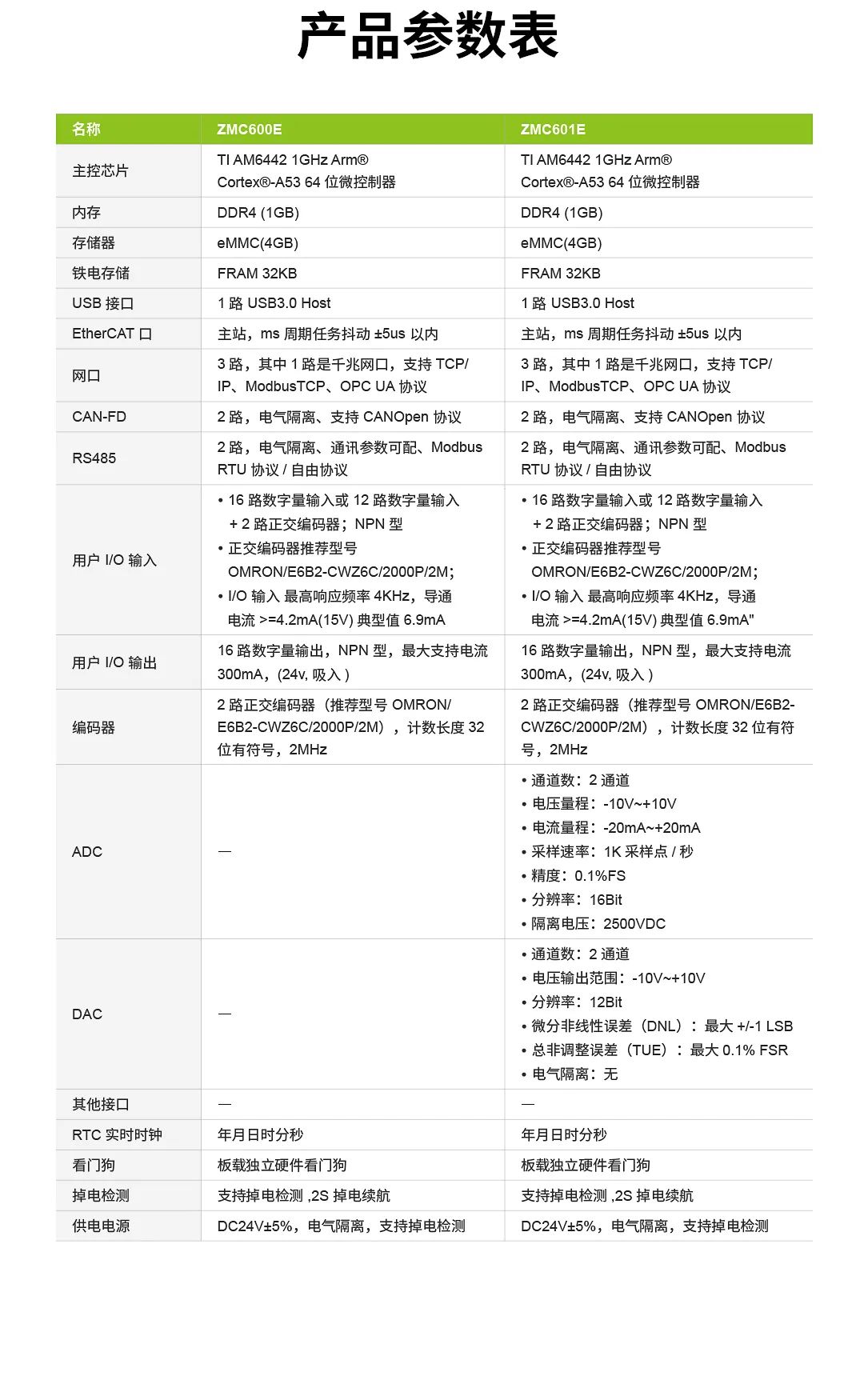
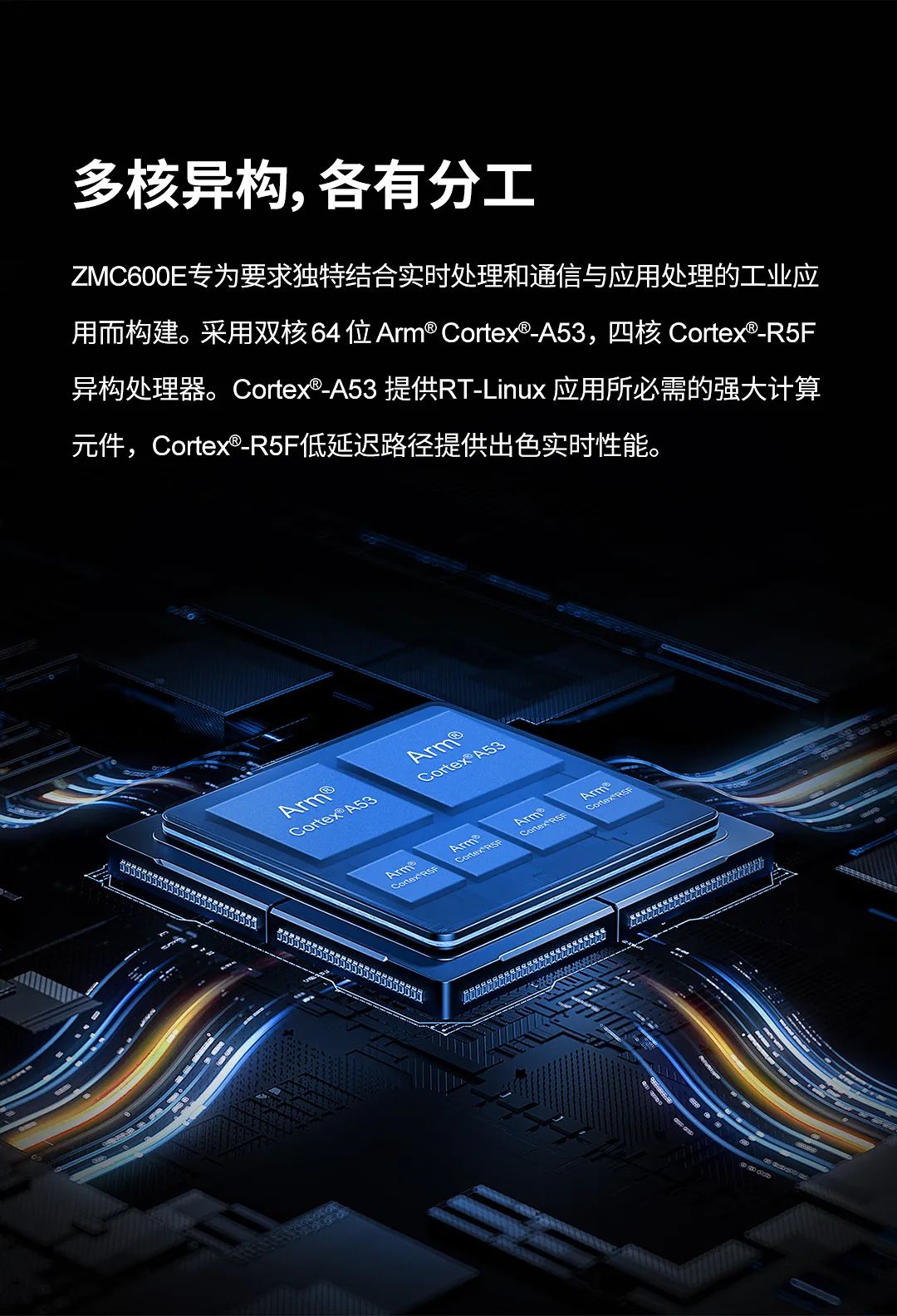
ZMC600E,多核異構(gòu)如何成就機器人精準控制?
導讀ZMC600E主站控制器憑借其多核異構(gòu)處理器的強大性能,實現(xiàn)了高算力與高實時性的完美平衡,讓機器人動作流暢、精準無誤。接下來,讓我們深入

三格電子-EtherCAT從站轉(zhuǎn)ModbusTCP主站/從站網(wǎng)關(guān)
? ?EtherCAT從站轉(zhuǎn)ModbusTCP主站/從站網(wǎng)關(guān) ?型號:SG-ECAT_S-TCP ? ? ?本產(chǎn)品是 EtherCAT 和

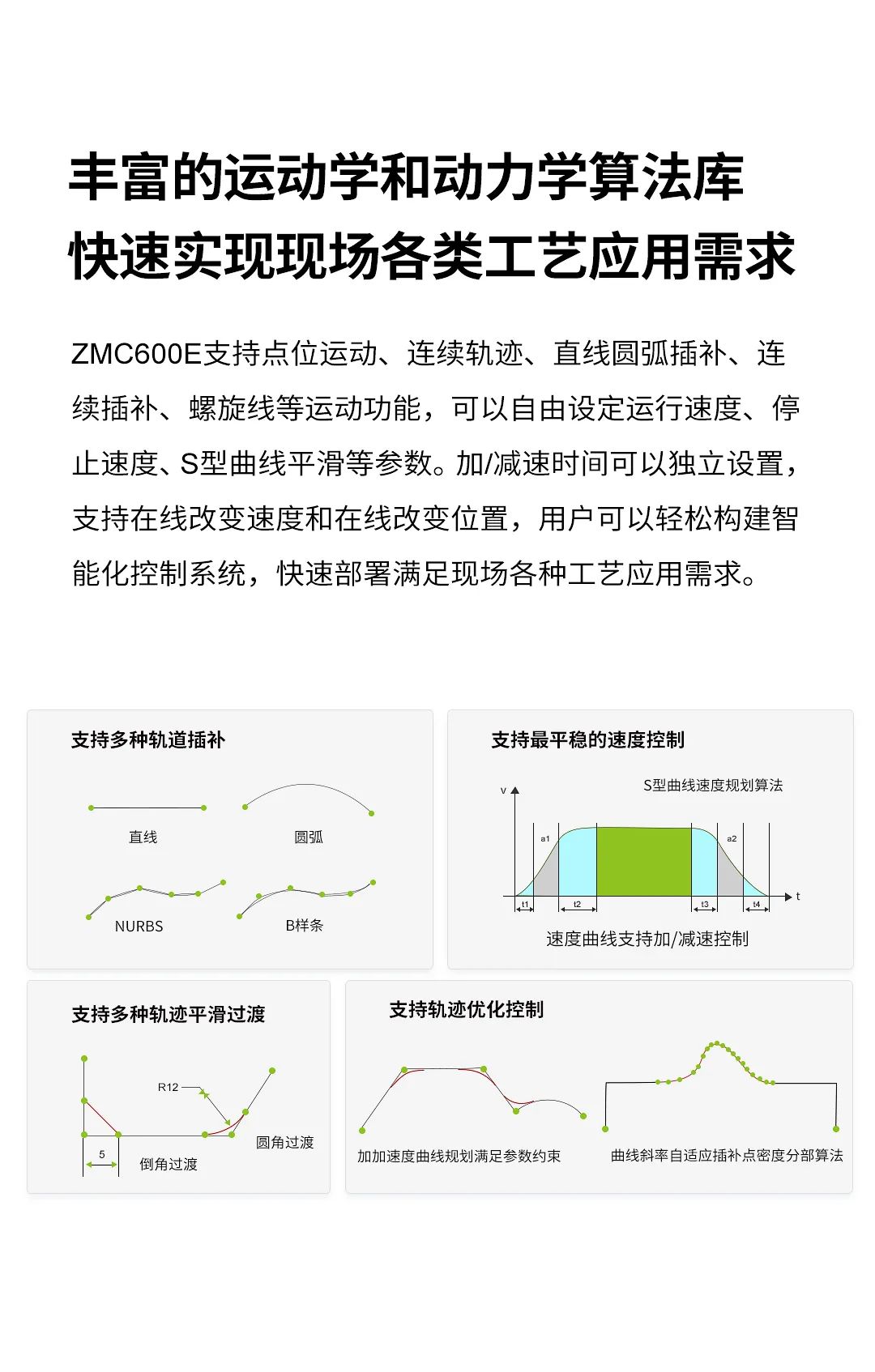
ZMC600E運動控制器直線和圓弧插補算法詳解
導讀想深入了解ZMC600E運動控制器的插補算法嗎?空間直線插補適用于精確定位,圓弧插補提供平滑曲線過渡。合理應用這些算法,能提升多軸協(xié)同能力,保障工作精度與可靠性,讓工業(yè)自動化更高效、更智能
ZMC600E運動控制器T型、S型速度規(guī)劃詳解
導讀想深入了解ZMC600E運動控制器的速度規(guī)劃嗎?T型線性加減速簡潔高效,S型過渡自然減震,避免沖擊。通過合理的規(guī)劃選擇,可有效提升設(shè)備精度、效率與性能。深入探索其核心,為工業(yè)自動化設(shè)備的控制賦能
脈沖全閉環(huán)EtherCAT運動控制器的固件升級
固件是常用功能。推薦優(yōu)先使用最新的RTSys軟件。 本文以ZMC406R-V2運動控制器為例給大家介紹正運動固件升級的多種方式。 ZMC406R-V2 6軸總線型運動控制器

EtherCAT EOE移植及上手說明
01EtherCAT介紹1EtherCAT狀態(tài)機制ESM(EtherCATstatemachine)是用來在啟動或者工作時協(xié)調(diào)主站和從站關(guān)系

使用C2000 EtherCAT從站控制器的SMI進行以太網(wǎng)PHY配置
電子發(fā)燒友網(wǎng)站提供《使用C2000 EtherCAT從站控制器的SMI進行以太網(wǎng)PHY配置.pdf》資料免費下載
發(fā)表于 09-07 10:37
?0次下載

EtherCAT主站轉(zhuǎn)Modbus TCP從站協(xié)議網(wǎng)關(guān)(JM-ECTM-TCP)
一,設(shè)備主要功能 捷米特JM-ECTM-TCP網(wǎng)關(guān)實現(xiàn)Modbus TCP網(wǎng)絡(luò)與EtherCAT網(wǎng)絡(luò)的互連互通。該網(wǎng)關(guān)可實現(xiàn)雙向數(shù)據(jù)交換,實現(xiàn)EtherCAT設(shè)備和Modbus TCP控制器的數(shù)據(jù)

EtherCAT從站轉(zhuǎn)Profinet主站協(xié)議網(wǎng)關(guān)(JM-PNM-ECT)
一,產(chǎn)品主要功能 1、 捷米特JM-PNM-ECT 型網(wǎng)關(guān)實現(xiàn)Profinet控制器和EtherCAT從站設(shè)備之間的數(shù)據(jù)通信,連接到Profinet(RT和IRT)網(wǎng)絡(luò)。支持EtherCAT

EtherCAT從站轉(zhuǎn)CANopen主站協(xié)議網(wǎng)關(guān)(JM-ECT-COP)
的驅(qū)動器可能采用CANopen協(xié)議進行控制和反饋,而整個機器人的控制系統(tǒng)基于EtherCAT網(wǎng)絡(luò)。EtherCAT從
基于全志T507-H的Linux-RT + Igh EtherCAT主站案例分享
網(wǎng)口和伺服驅(qū)動器A的IN網(wǎng)口,將伺服驅(qū)動器A的OUT網(wǎng)口使用網(wǎng)線連接至伺服驅(qū)動器B的IN網(wǎng)口。
圖12圖13為便于測試,我司提供的經(jīng)驗證的IgH EtherCAT
發(fā)表于 07-17 11:18





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論