 交通流模型分類及微觀建模
交通流模型分類及微觀建模
近年來,交通仿真越來越受到人們關注,原因在于它在各類場景方面的應用變得越來越廣泛。交通仿真不僅可以用于交通規劃設計領域,幫助設計人員改善路網與交通管理效率,并且還能輔助構建虛擬城市場景、生成自動駕駛車輛測試場景的動態交通環境。在以上應用場景中,仿真車輛的運動表現是否真實對仿真結果有重要影響,而交通流模型可以說是影響車輛運動表現最重要的因素。
文章剩余內容為兩部分,先介紹了交通流模型的種類,然后討論了微觀交通流模型的建模方法。交通流模型分類
交通流是車輛群體在道路上行駛時的交通狀態[1],在一定的道路環境下,交通流會隨著時間的變化而變化,能揭示這種變化規律的就是交通流模型。簡單來說,交通流模型要解決的問題就是,給定一個道路網絡、交通流和初始狀態,交通將如何演變? 交通流模型的構建涉及很多數學描述,依據構建方法的不同,大體可以分為三類,分別是微觀模型、宏觀模型和介觀模型(中觀模型),各模型的特點如下: 1.宏觀交通流模型:以整個交通流作為研究對象,用流體力學的方法對交通流進行建模,從整體層面對交通流進行分析和預測,著重表現道路網絡的總體運行狀態和特征,而忽略個體車輛的行為,宏觀交通流的經典模型是LWR模型和連續二階交通流PW模型。該類模型對計算機資源要求較低,仿真速度較快,比較適合對大規模路網進行交通仿真。 2.微觀交通流模型:以個體車輛和駕駛員行為作為研究對象,從運動學角度對車輛的加速度、轉向和制動行為進行建模,著重考慮個體車輛之間的相互影響和交互,能夠較為精準的描述車輛在道路上的跟馳、換道、超車等行為,并且能夠提供直觀的交通流動畫演示。該類模型對計算機的資源要求較高,仿真速度慢,一般用來研究交通流與局部道路設施的相互影響。不過當采用并行處理技術時,微觀模型也可用于大型路網的交通仿真[2]。3.中觀交通流模型:該類模型介于宏觀和微觀之間,以若干車輛構成的車隊作為研究對象,描述車隊在路段和節點的流入流出行為,對車輛的車道變換之類的行為也能用簡單的方法近似描述。該類模型可用來評價較大范圍的交通流,但由于模型中的變量太多,難以實時求解,在應用上會受到一定限制。 4.混合交通流模型:該類模型綜合了宏觀模型和微觀模型的優點,既能夠考慮整個道路網絡的運行狀態,又能夠分析每一輛車的行駛軌跡,比如Sewall等人[3]使用基于代理(agent)的模型來模擬感興趣區域的交通,而其余區域使用連續體模型,通過在兩種建模方法之間動態和自動切換,進而可以根據用戶偏好來模擬不同詳細級別下的交通。
黃框范圍使用微觀agent,其他范圍使用宏觀flow
微觀交通流模型在城市交通仿真和自動駕駛仿真測試中應用較多,下面將著重介紹微觀交通流模型的構建方法。微觀交通流建模
按照構建方法的不同,微觀交通流建模大致可以劃分為傳統交通流建模和現代交通流建模兩種類型[4]。
傳統交通流建模
傳統交通流建模是基于各種物理學原理(主要是運動學),使用微分方程、偏微分方程等數學工具來描述道路上車輛的跟馳、換道等行為。其明顯特點是交通流模型的限制條件比較苛刻, 模型推導過程比較嚴謹, 模型物理意義明確。該方法在交通流理論體系中仍居主導地位, 并且在應用中方法相對成熟,主要包括跟馳模型、元胞自動機模型兩大類。在元胞自動機模型中,道路被離散化為單元(或稱元胞),每個單元代表道路上的一個區域,模型決定車輛何時從當前單元移動到下一個單元。由于其簡單性,元胞自動機模型計算效率高,可以模擬大型路網上的大量車輛。然而由于其離散性,因此只能再現有限數量的真實交通行為。
而跟馳模型則是運用動力學方法,探究車輛在無法超車的單一車道上隊列行駛時,車輛跟馳狀態的變化。通過求解連續時間的微分方程,不僅可以得到任意時刻車隊中各輛車的速度、加速度和位置等參數,進而描述交通流的微觀特性,還可以通過進一步推導,得到平均速度、密度、流率等參數,描述交通流的宏觀特性。鑒于跟馳模型可以生成更加真實的駕駛行為,下面將著重對跟馳模型進行介紹。
先簡單的理解下跟馳模型,假設你正駕車行駛在道路上,你正前方車道有另一輛車,且你大概能夠預估出前車的速度和與前車之間的距離,那么下一刻你到底是該加油門呢還是踩剎車還是保持當前油門不變呢?到這里我們肯定會想,如果距離很近,且前車速度比我們小,肯定要剎車了;如果距離很遠,且前車速度比我們大,一般是要加速的。跟馳模型干的就是這個事兒,依據當前車輛與前方車輛的速度差和距離,輸出當前車輛的加速度或者速度。以此為目的,自20世紀50年代以來,國內外的學者對車輛跟馳模型進行了大量、系統的研究,形成了以刺激-反應模型、安全距離模型、生理-心理模型為主的三類模型。
(1)刺激-反應模型
刺激-反應模型的一個代表模型是GM(General Motor)模型,該模型假設車輛在22.86m以內未超車或變換車道的情況下,由駕駛動力學模型推導而來,并引入反應=靈敏度×刺激的觀念,其中反應用后車的加速度表示,刺激用后車與前車的相對速度表示。其一般表達式為:
式中,——時刻第輛車的加速度;——時刻第輛車與第輛車之間的速度差;
——時刻第輛車與第輛車之間的距離;
——常數。
這個模型的基本假設為:駕駛員的加速度與兩車之間的速度差成正比,與兩車的車頭間距成反比,同時與自身的速度也存在直接的關系。當跟車駕駛員感知到車頭間距及相對速度差異過大時,會加速接近前車以縮短車頭間距,逐漸由不受影響狀態進入受影響狀態;當跟車駕駛員感知到過于接近前車而不安全時,則減速以加大車頭間距;減速后的車頭間距若不合乎跟車駕駛者的期望則再加速,整個系統就在車輛不斷加減速的自我調整過程中達到穩定跟駛狀態。
GM模型形式簡單,物理意義明確,作為早期的研究成果,具有開創意義,許多后期的車輛跟馳模型研究都源于刺激-反應基本方程。但是GM模型的通用性較差,現在較少使用GM模型。
(2)安全距離模型
安全距離模型也稱防撞模型,該模型最基本的關系并非GM模型所倡導的刺激-反應關系,而是尋找一個特定的跟車距離(通過經典牛頓運動定律推導出)。如果前車駕駛員做了一個后車駕駛員意想不到的動作,當后車與前車之間的跟車距離小于某個特定的跟車距離時,就有可能發生碰撞。安全距離最初的模型如下:
式中,——參數。
安全距離模型在計算機仿真中有著廣泛應用,主原因是其標定比較簡單,大多數情況只需知道駕駛員將采用的最大制動減速度,就能滿足整個模型的需要。但該模型仍有許多問題需要解決,例如,避免碰撞的假設在模型的建立中是合乎情理的,但與實際情況存在著差距;在實際的交通運行中,駕駛員在很多情況下并沒有保持安全距離行駛。
(3)生理-心理模型
生理-心理模型也稱反應點模型(Action Point Models)簡稱AP模型。該模型用一系列閾值和期望距離體現人的感覺和反應,這些界限值劃定了不同的值域,在不同的值域,后車與前車存在不同的影響關系。該類模型的代表模型就是Wiedeman建立的MISSION模型。該模型根據前后車距離與速度差的不同值,將后車的狀態劃分為跟馳行駛、制動避禍、逼近前車、自由行駛、脫離前車五種狀態。然后后車再依據不同狀態的加速度計算公式,計算加速度。
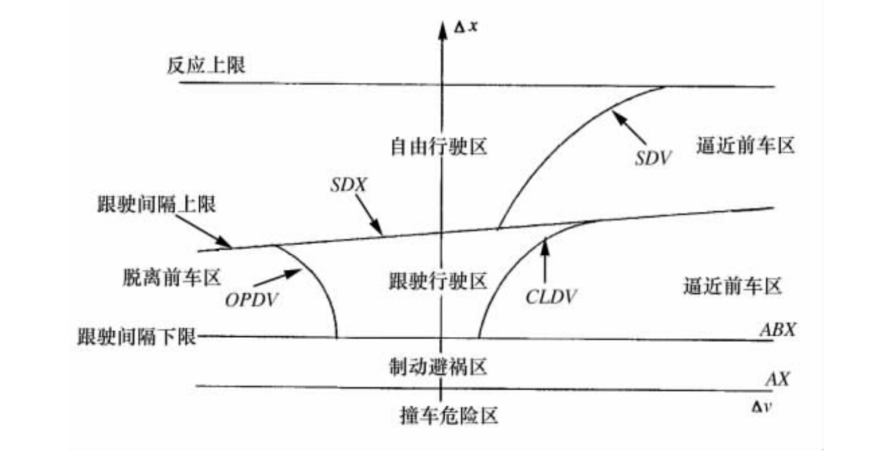 Wiedeman跟馳模型的狀態分區
Wiedeman跟馳模型的狀態分區
生理-心理跟馳模型對車輛跟馳行為的刻畫比較準確,因而在如今的微觀交通仿真軟件中應用廣泛,我們常見的VISSIM、PARAMICS、TransModeler軟件都采用了心理-生理跟馳模型。該類模型的缺點在于模型的參數較多,子模型之間的相互關系比較復雜,并且對于各種閾值的調查觀測比較困難,使用之前需要進行大量的標定工作。
(4)換道模型 以上內容大致解釋了跟馳模型的原理和常見的類型,但僅靠跟馳模型是不夠的,現實中車輛還存在超車、換道的行為,為合理描述這種行為,學者們對換道模型進行了大量研究。與車輛跟駛行為相比,換車道行為更加復雜,以至于難以用數學方法描述。換車道行為是駕駛員根據自身狀態,針對周圍車輛的車速、間隙等周邊環境信息的刺激,調整并完成自身駕駛目標的綜合過程。要描述這樣復雜的駕駛行為,必須有大量的觀測數據作為基礎,這也是換車道模型相比于跟駛模型發展滯后的根本原因。從駕駛員的角度來看,換道行為大致可以分為以下三個階段: 1.產生換道動機并確定目標車道 a.這個階段中,某一時刻駕駛員在周圍交通狀況和自身行駛目標的刺激下,萌生了換道的念頭,并初步確定了目標車道(可以是一條或多條)。換道動機的產生有兩種類型,車輛需要駛入或者駛出交織區、匝道這種有明確目標車道的換道被稱為強制換道,強制換道往往與車輛自身的路徑規劃有關;另一種則是車輛不滿意當前的行駛狀態而產生的沒有固定目標車道的換道,這種換道被稱為自由換道。自由換道確定目標車道的首要原則就是,行駛至目標車道后能夠獲得更好的行駛狀態(更好的視野、更快的速度等)。 b.由于強制換道的目標車道往往已經確定,因此換道動機階段的研究往往是針對自由換道展開的。從當前應用的模型來看,主要有PLC法和綜合評價法兩種方式。其中PLC是換道車道概率的意思,這種方法以駕駛滿意度為評價指標,對于所有處于不滿意狀態的車輛,由概率分布的方式確定車輛的換道需求。這種方法的缺陷在于過度依賴標定數據,并且沒有解釋換道機理;綜合評價法則是依據駕駛員實際需求的產生過程,如(前方是大貨車、公交車就換道,前方車速小于期望車速20km/h時就換道),在模型的適用性方面更為可靠,但這種方法主觀性太強,且數據不易獲得,因而開展的研究較少。 2.判斷能否換道 a.在確定目標車道后,需要判斷目標車道是否有條件讓本車完成換道,這個判斷主要是通過間隙檢測來完成的。間隙檢測就是說本車變至目標車道后,是否會對目標車道運行的車輛造成影響,包括本車能否安全跟馳目標車道的前車以及目標車道的后車能否安全跟馳本車。Masahiro Kojima 提到用安全系數來評價間隙是否接受,當目標車道的前、后間隙都滿足安全系數時,則間隙接受,即:式中,——最小期望間距;
——車長;
——平均減速度;之間的距離;
——前車位置;
——主車車速。
3.執行/不執行換道 a.當間隙檢測滿足換道要求時就可以進行換道了,現在微觀仿真軟件常采用的方式是,給換道車輛初始化一個車道偏角,直到車輛完成換道。 總之,換道模型建立在假設的基礎之上,且假設的條件多是期望車速、期望運行狀態等很難驗證與標定的參數,因此模型的可轉移性普遍不強。現代交通流建模 現代交通流建模以現代科學技術和方法(如神經網絡、人工智能等) 為主要工具來描述車輛行為。其特點是所采用的模型和方法不追求嚴格意義上的數學推導和明確的物理意義, 而更重視模型或方法對真實交通流的擬合效果。這類模型主要用于對復雜交通流現象的模擬、解釋和預測。現代交通流建模主要包含模糊控制和神經網絡兩大類型。 (1)模糊控制 模糊控制是一種基于模糊邏輯的控制方法,它使用模糊規則來將輸入量映射到輸出量,以實現對系統的控制。模糊控制通常用于不確定性較大或難以建立準確動態模型的系統控制中。在現實的跟馳行為中,后車駕駛員并不會基于確定的速度、距離等信息,輸出確定的加速度來保持對前車的跟蹤。駕駛員會基于自身的經驗來判斷,并采取適合于自身駕駛風格的跟馳規則,這恰好就符合模糊控制的特點。 1999年,Kikuchi和Chakroborty首先利用該理論來模糊化GHR模型(一種刺激-反應跟馳模型),把模型中輛車的速度差、距離差與前車加速度分別設定為6、6、12個利用自然語言描述的子集,進而進行計算,其模糊規則為: 式中,——反應時間; ——表示本車駕駛員希望趕上前車的期望時間。 基于模糊控制的車輛跟馳模型雖然能夠融入駕駛員的判斷經驗,使模型更加趨近于現實情況,但由于隸屬度函數是人為設定的,存在一定的誤差,在一定程度上會影響到輸出結果。 (2)人工智能 人工智能(主要是機器學習和深度學習)在交通流模型中主要用來學習車輛的詳細運動特征(也可以應用在上面的模糊控制中),包括縱向加減速和換道過程。
Wei和Liu(2013)[5]提出了一種自學習支持向量回歸(support vector regression,SVR)建模方法,該方法首先使用支持向量回歸模型對車輛之間的跟馳關系進行建模,并根據歷史數據自適應地調整模型參數。然后利用所建立的模型預測車輛的速度和加速度,并將預測結果作為輸入來更新模型參數。通過不斷地迭代這個過程,模型可以逐漸地適應交通流的演化,從而更準確地預測未來的車輛行為。相比于傳統的支持向量回歸模型,該方法具有更好的自適應性能,可以更有效地處理跟馳不對稱性的問題。
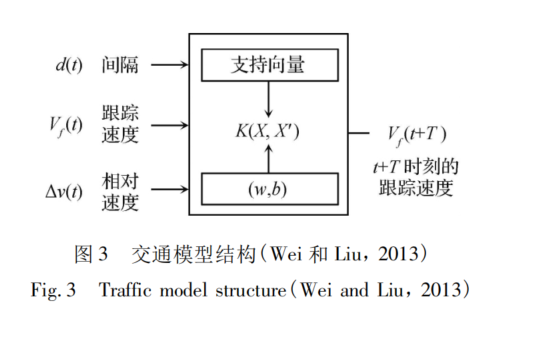 交通模型結構
交通模型結構
Xie 等人( 2019) [6]提出了一種基于深度學習的交通車自主換道模型,將深度置信網絡( deep belief network,DBN) 和長短期記憶神經網絡( long short-term memory,LSTM) 結合,利用實際換道數據分別訓練構建換道決策和換道執行兩個模塊,集成模型可以準確地預測車輛的換道過程并挖掘換道行為的基本特征。
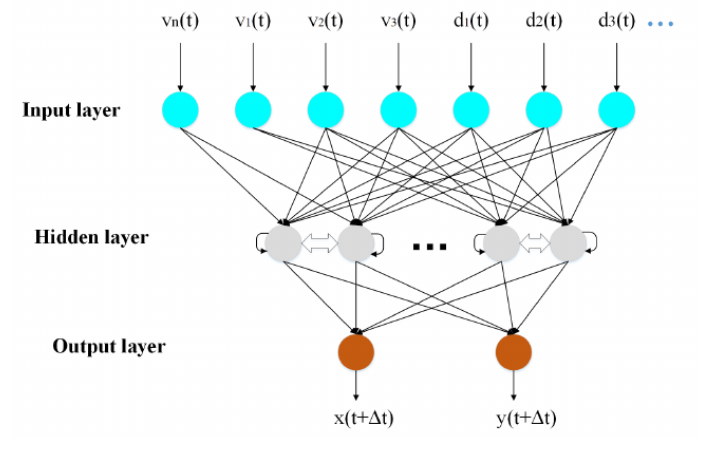 用于LCI模型的LSTM的結構
用于LCI模型的LSTM的結構
使用該類方法,當訓練數據的量較小時,模擬結果可能會變得單調,模型不能很好的描述車輛行為;當數據量和數據質量都較好的條件下,該類方法可以較好模擬車輛行為,但可移植性存疑,尤其是將模型應用在另一個物理區域(非數據采集區域),模型的表現有待討論。另外該類方法只能用于某種類型的智能體(例如車輛),難以模擬不同類型智能體(車與人)在環境中的運動和交互行為,特別是在交通路口模擬方面,汽車和人類之間的相互作用難以捕捉。從廣義來看,人工智能還不能替代基于物理機理的模型在交通流建模中的作用。
參考文獻
[1] 李新剛. 基于元胞自動機模型的交通系統微觀建模與特性研究[D].北京交通大學,2010.
[2] 張洪賓,高興超.道路交通微觀仿真模型研究綜述[J].德州學院學報,2007(06):88-92.
[3] SEWALL J . WILKIE D .. LIN M. C.: Interactive hybrid simulation of large-scale traffic. ACM Transactions on Graphics (TOG) 30. 6(2011),135.2.5.6.10
[4] 王殿海, 曲昭偉. 對交通流理論的再認識[J]. 交通運輸工程學報, 2001, 1(4): 55-59.
[5] Wei D L and Liu H C. 2013. Analysis of asymmetric driving behavior using a self-earning approach. Transportation Research Part B:Methodological, 47: 1-4 DOI: 10.1016 j.tb.2012.09.003]
[6] Xie D F, Fang Z Z, Jia B and He Z B. 2019. A data driven lane changing model based on deep learning. Transportation Research Part C :Emerging Technologies, 106 : 41-60 [DOI: 10. 1016 /j.trc. 201907.002]
掃描二維碼
關注賽目科技
 ?
?專注智能網聯汽車
測試丨驗證丨評價研究
作者:仿真事業部-陳旭中
原文標題:交通流模型分類及微觀建模
文章出處:【微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
-
賽目科技
+關注
關注
0文章
44瀏覽量
1038
原文標題:交通流模型分類及微觀建模
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
宇視科技梧桐大模型賦能交通治理
基于RC熱阻SPICE模型的GaNPX?和PDFN封裝的熱特性建模

智慧交通對交通的幫助有哪些?
壓敏電阻的通流容量與壓敏電阻直徑

知識分享 | 輕松實現優質建模

數字孿生技術在交通領域的應用現狀和展望

【壓敏電阻】什么是通流容量?通流容量有什么用?

什么是通流容量?通流容量有什么用?
BP神經網絡預測模型的建模步驟
bp神經網絡預測模型建模步驟
arma-garch模型的建模步驟
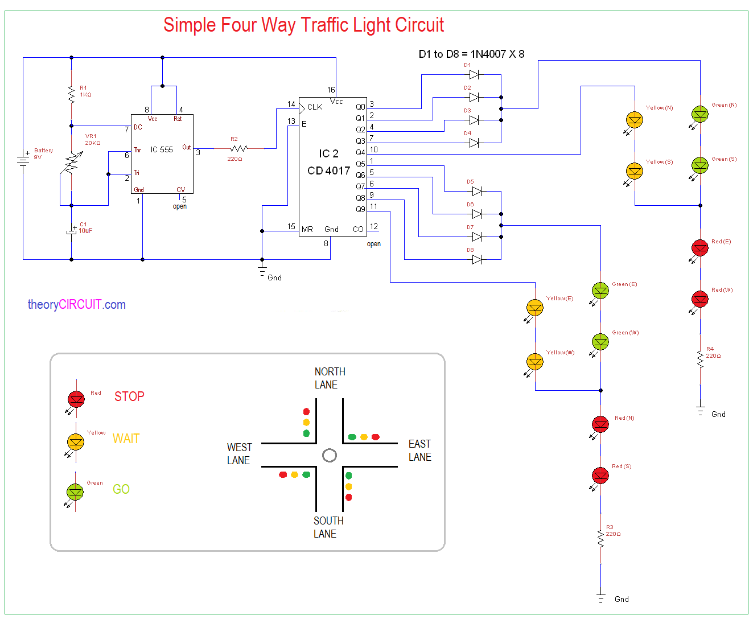
基于555定時器的四路交通燈電路圖





 工商網監
工商網監
評論