") 庫卡機器人如何實現(xiàn)PLC外部控制
庫卡機器人如何實現(xiàn)PLC外部控制
1、機器人與系統(tǒng)相連
如果機器人進(jìn)程應(yīng)由一個中央位置進(jìn)行控制(如由一個主機或 PLC),則這一控制通過外部自動運行接口進(jìn)行。
2、系統(tǒng)結(jié)構(gòu)原理
為了在 KR C4 和 PLC 之間能夠順利進(jìn)行通訊,必須滿足以下幾點:
外部自動運行方式:在該運行方式下由一臺主機或者 PLC 控制機器人系統(tǒng)
CELL.SRC:從外部選擇機器人程序的控制程序。
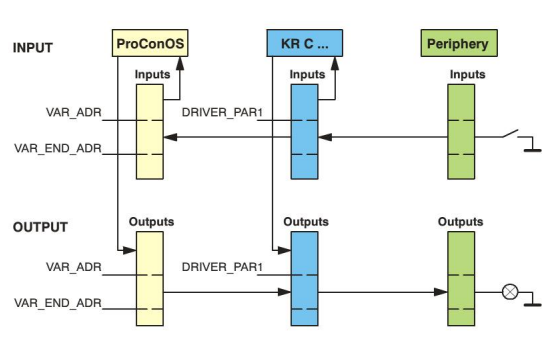
PLC 和機器人之間的信號交換: 用于配置輸入和輸出端信號的外部自動運行接口:
發(fā)送至機器人的控制信號(輸入端): 開始和停止信號、程序編號、故障確認(rèn)
機器人狀態(tài)(輸出端):驅(qū)動裝置狀態(tài)、位置、故障等等。
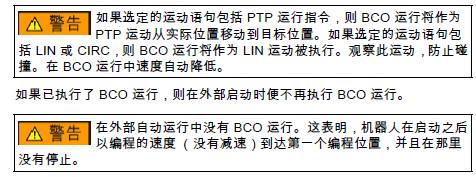
3、從外部啟動程序的安全須知
選擇了 CELL 程序后必須執(zhí)行 BCO 運行。
4、外部程序啟動的操作步驟
前提條件: 在運行方式T1或T2 下
用于外部自動運行的輸入/ 輸出端和 CELL.SRC 程序已配置。
1. 在導(dǎo)航器中選擇 CELL.SRC 程序。CELL 程序始終在目錄 KRC:R1 下
2. 將程序倍率設(shè)定為 100%。(以上為建議的設(shè)定值。也可根據(jù)需要設(shè)定其
它數(shù)值。)
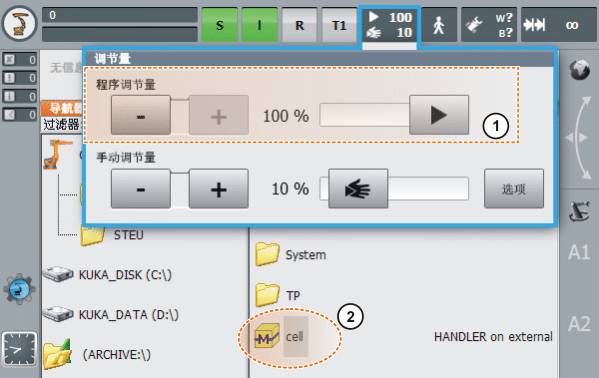
選擇 Cell 和設(shè)置手動倍率
1 HOV 設(shè)置
2 選定 Cell.src
3. 執(zhí)行 BCO 運行:按住確認(rèn)開關(guān)。然后按住啟動按鍵,直至信息窗顯示“ 已達(dá) BCO”。
4. 選擇“ 外部自動化” 運行方式
5. 在上一級控制系統(tǒng) (PLC) 處啟動程序。
5、Cell.src 控制程序
管理由 PLC 傳輸?shù)某绦蛱枙r,需要使用控制程序 Cell.src。該程序始終位于文件夾“R1” 中。與任何常見的程序一樣,Cell 程序也可以進(jìn)行個性化調(diào)整,但程序的基本結(jié)構(gòu)必須保持不變。
Cell 程序的結(jié)構(gòu)和功能:
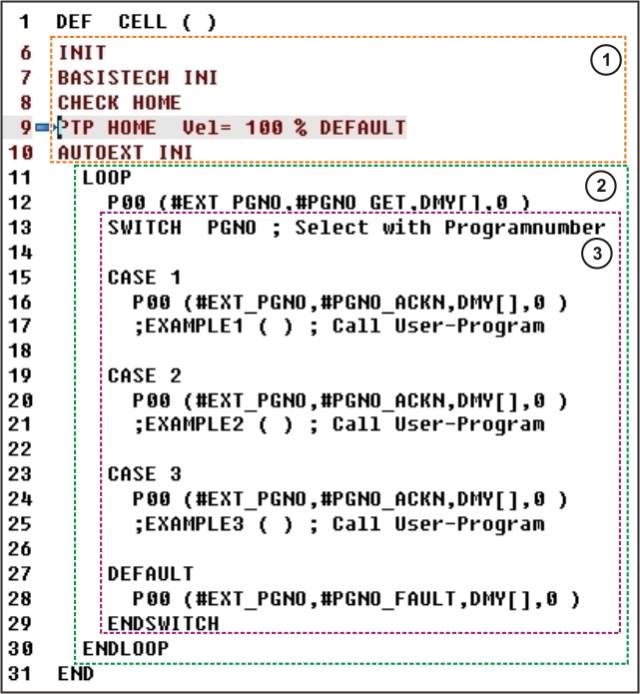
1 、初始化和 Home 位置
初始化基坐標(biāo)參數(shù)
根據(jù)“Home” 位置檢查機器人位置
初始化外部自動運行接口
2、無限循環(huán):
通過模塊“P00” 詢問程序號
進(jìn)入已經(jīng)確定程序號的選擇循環(huán)。
3 、程序號的選擇循環(huán)
根據(jù)程序號(保存在變量“PGNO” 中)跳轉(zhuǎn)至相應(yīng)的分支(“CASE”) 中。
記錄在分支中的機器人程序即被運行。
無效的程序號會導(dǎo)致程序跳轉(zhuǎn)至“ 默認(rèn)的” 分支中。
運行成功結(jié)束后會自動重復(fù)這一循環(huán)。
6、操作步驟
1. 切換到“ 專家” 用戶組
2. 打開 CELL.SRC。
3. 在“CASE” 段中將名稱“EXAMPLE” 用應(yīng)從相應(yīng)的程序編號調(diào)出的程序的
名稱替換。刪除名稱前的分號。
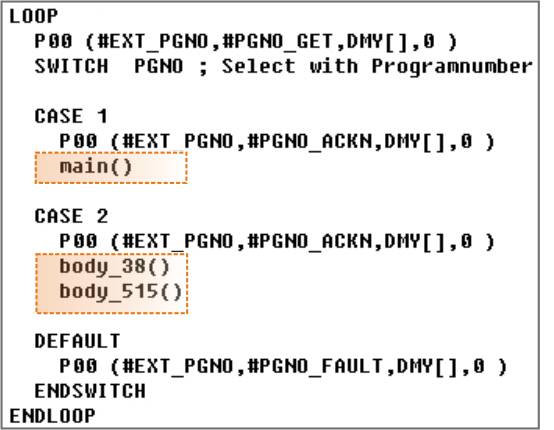
圖 11-4: 經(jīng)適配的 Cell 程序舉例
7. 關(guān)閉程序并保存更改。
審核編輯:湯梓紅
-
機器人
+關(guān)注
關(guān)注
213文章
29555瀏覽量
211903 -
plc
+關(guān)注
關(guān)注
5031文章
13799瀏覽量
472697 -
接口
+關(guān)注
關(guān)注
33文章
8963瀏覽量
153335 -
程序
+關(guān)注
關(guān)注
117文章
3825瀏覽量
82544
原文標(biāo)題:【干貨】庫卡機器人如何實現(xiàn)PLC外部控制!
文章出處:【微信號:你身邊的機器人專家,微信公眾號:你身邊的機器人專家】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
酷卡機器人提示要求調(diào)零的目的是什么?
庫卡KUKA機器人四種啟動方式介紹
KUKA焊接機器人伺服電機常見故障及維修處理
關(guān)于庫卡機器人保養(yǎng)注意事項
KUKA機器人伺服驅(qū)動模塊維修

庫卡機器人有限公司培訓(xùn)資料之庫卡機器人教程C2系統(tǒng)編程
KUKA庫卡機器人MGV電源模塊維修PH1013-2840






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論