") ?Robomaster C板再體驗(yàn)
?Robomaster C板再體驗(yàn)
這篇文章是Robomaster C板初體驗(yàn)的擦屁股篇,但是還沒(méi)有寫(xiě)完,估計(jì)還有好幾篇。
第一個(gè)是PWM點(diǎn)燈大法:
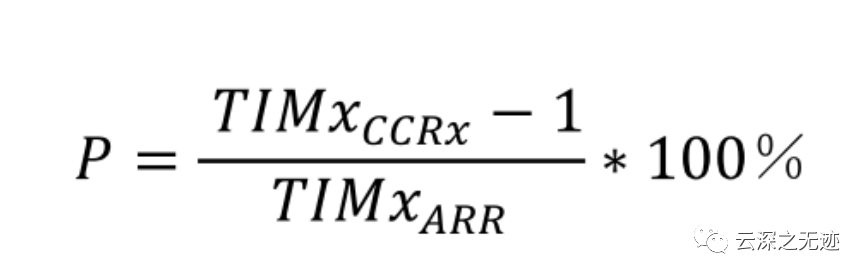
占空比的設(shè)計(jì)
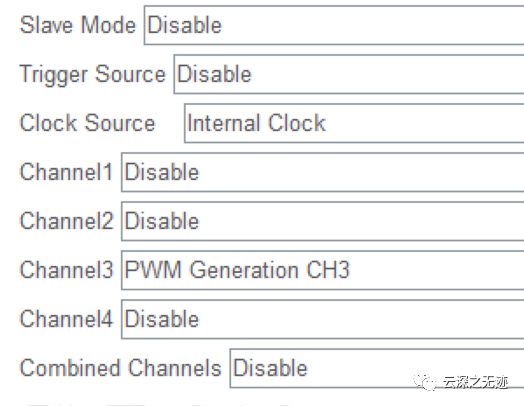
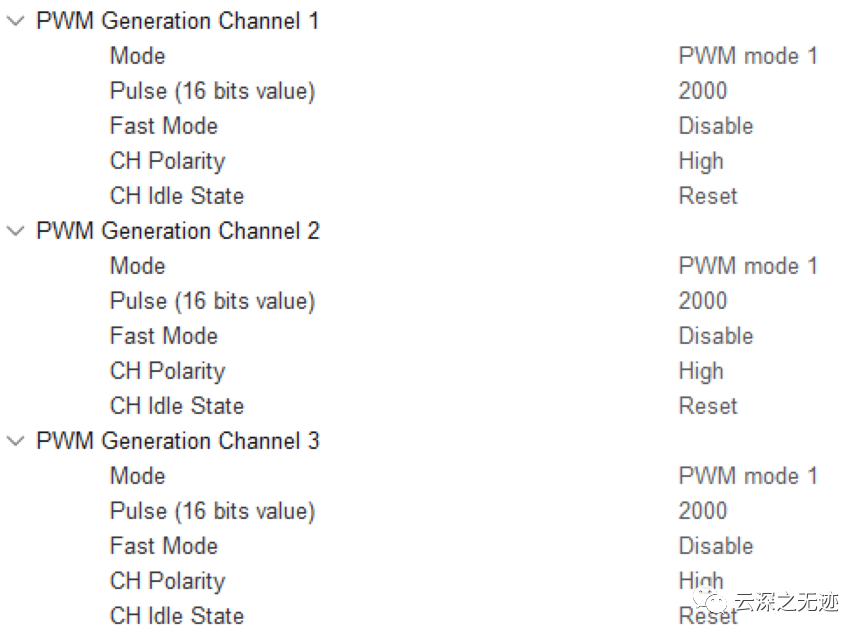
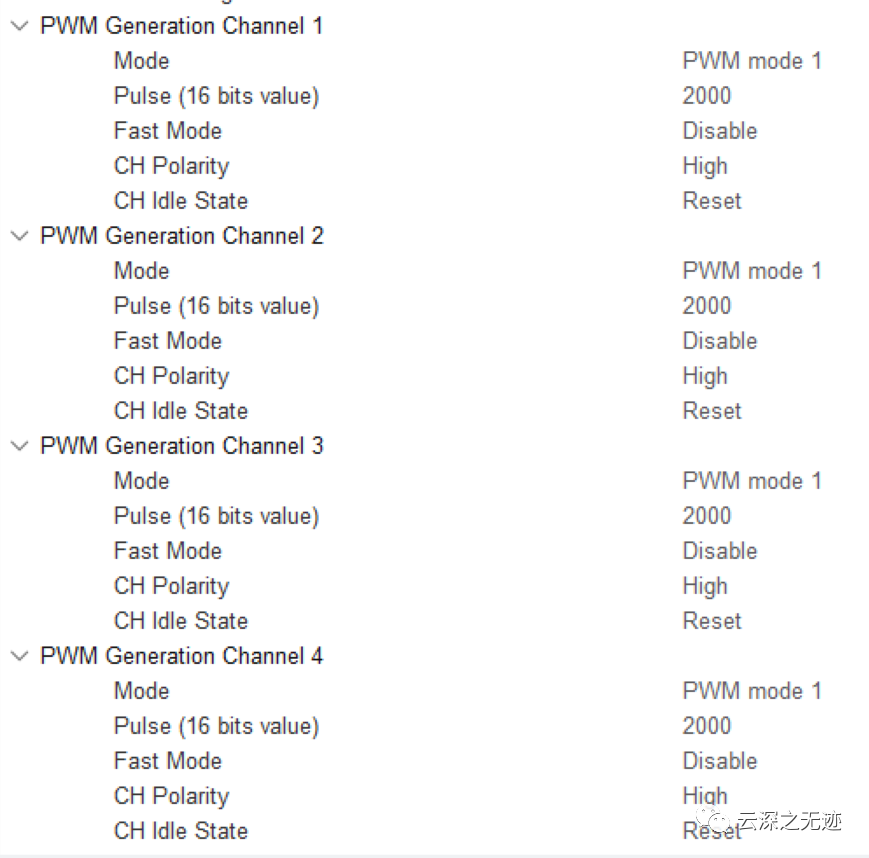
在MX里面的PWM通道的設(shè)計(jì)
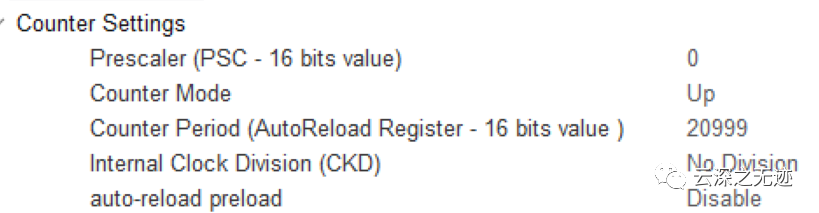
這個(gè)是具體的參數(shù)設(shè)置
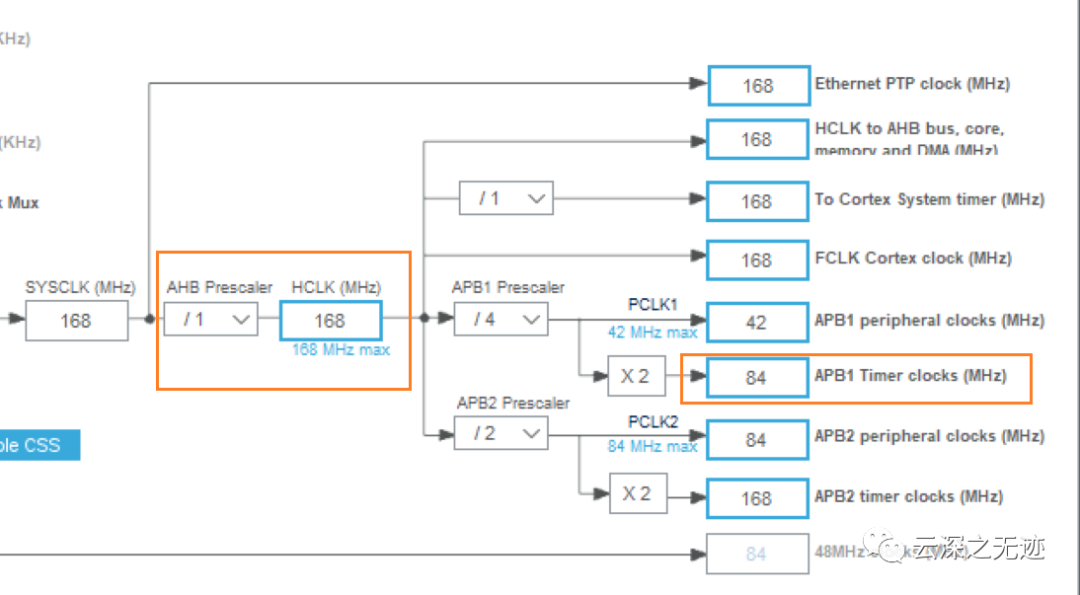
時(shí)鐘使用是APB1
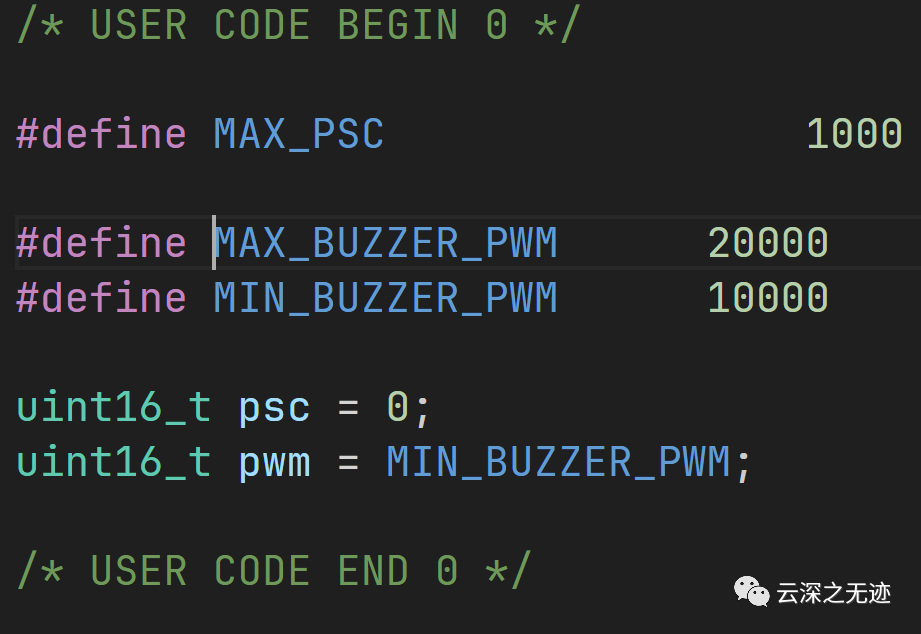
蜂鳴器的參數(shù)提前要在宏定義里面限制一下
在while之前的初始化

蜂鳴器的打開(kāi)和關(guān)閉需要在另外一個(gè)函數(shù)里面打開(kāi)
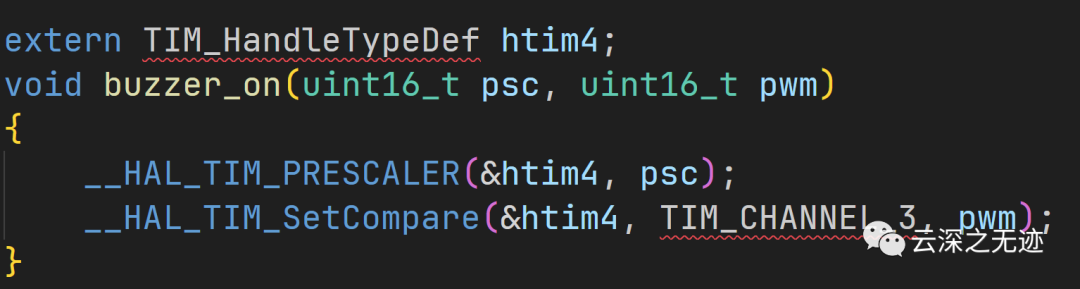
如果這個(gè)數(shù)據(jù)結(jié)構(gòu)是外面定義的,記得extern,第一個(gè)是預(yù)設(shè)定時(shí)器的新值,第二個(gè)函數(shù)是TIM的通道以及比較寄存器的初值。
響的時(shí)候傳進(jìn)去的參數(shù)
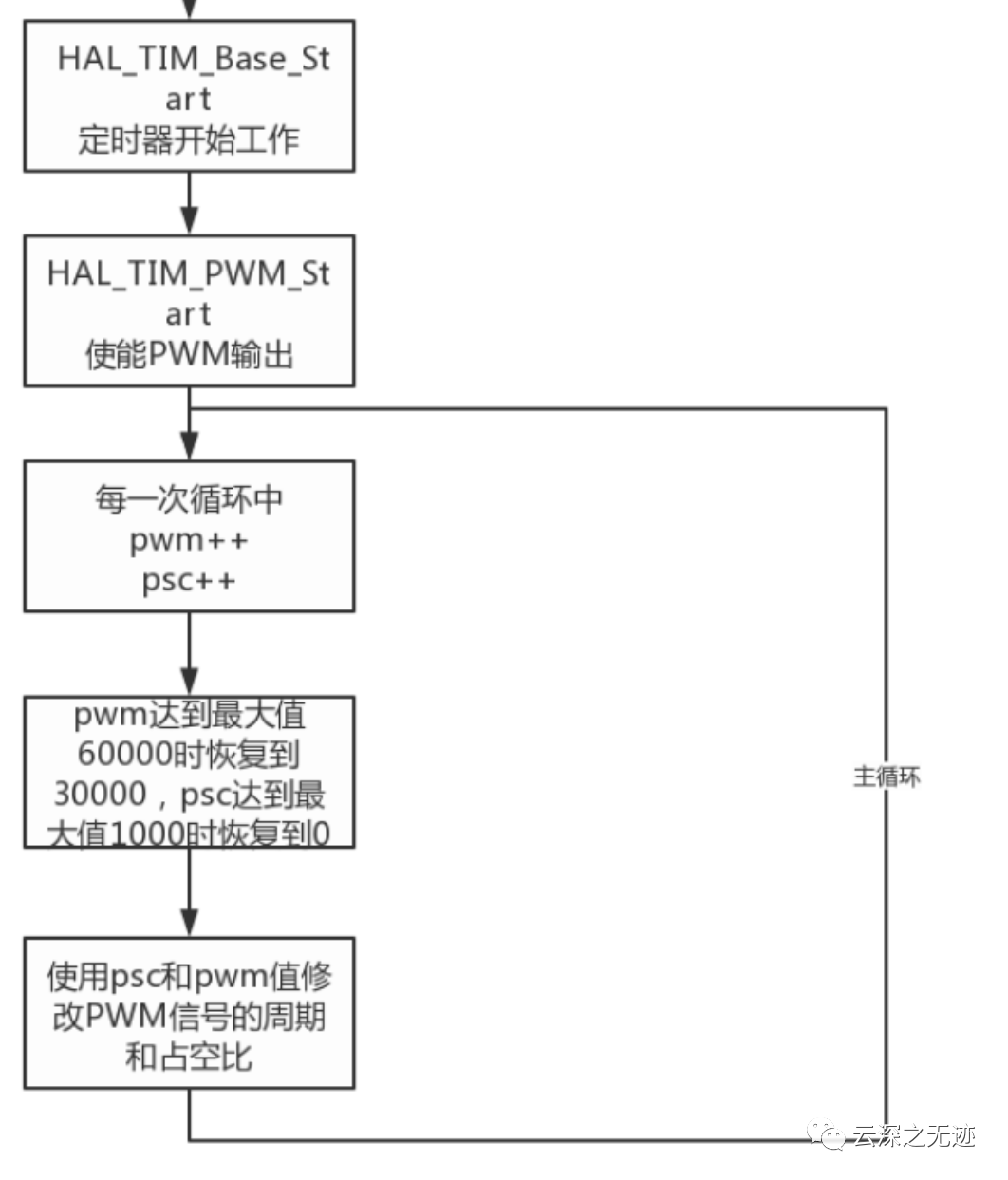
程序的框圖
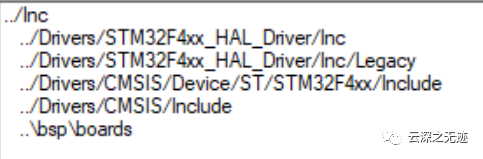
在keli里面的path
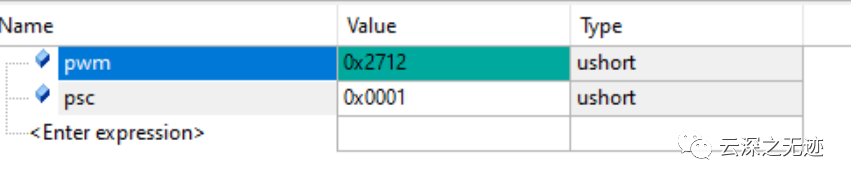
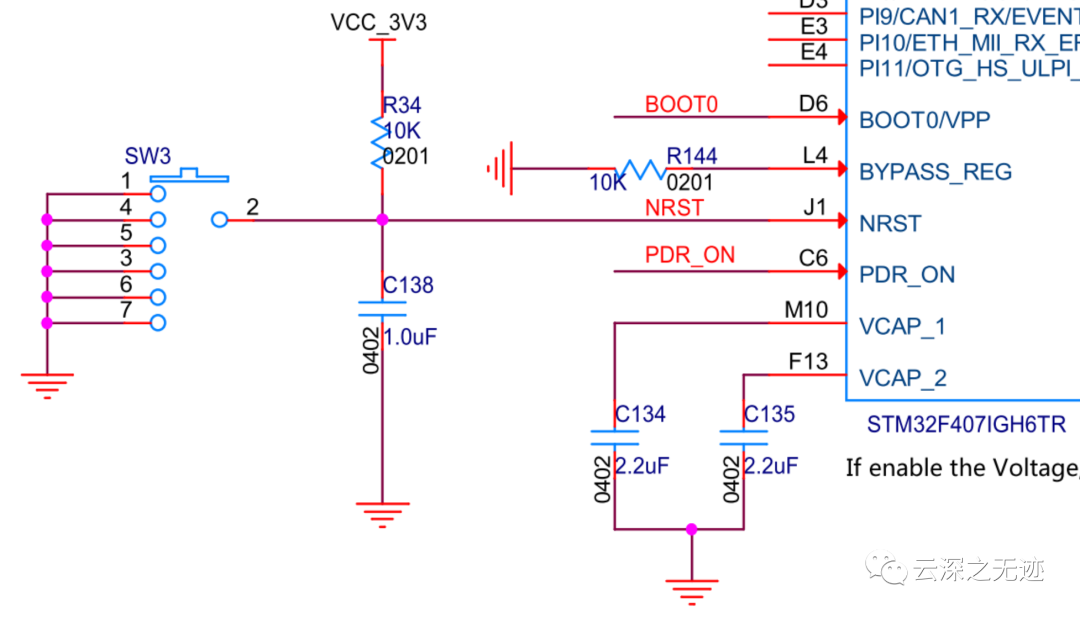
調(diào)試的口子,這里我寫(xiě)錯(cuò)了
在所有的引腳下面都ESD保護(hù)了
一些適用的場(chǎng)景
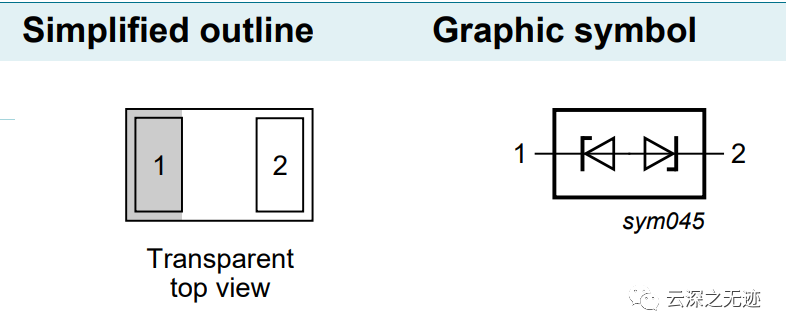
原理圖的內(nèi)部結(jié)構(gòu)
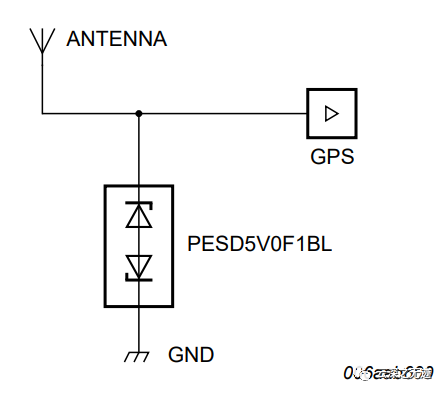
應(yīng)用的時(shí)候都接在回地的回路上面就行
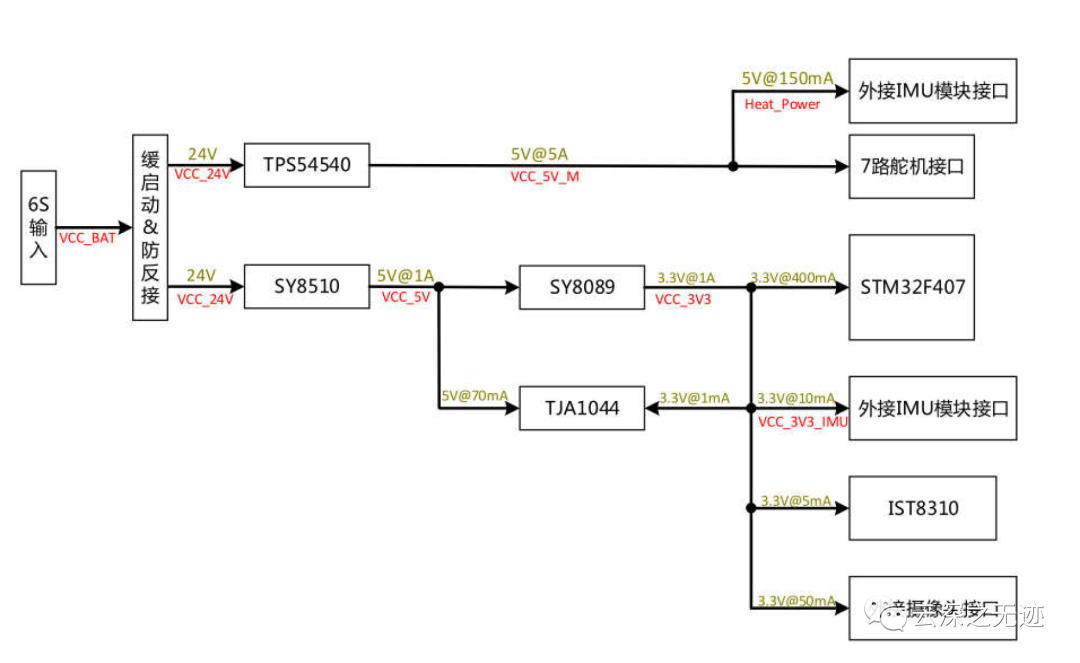
這個(gè)是C型的電源樹(shù),原理圖
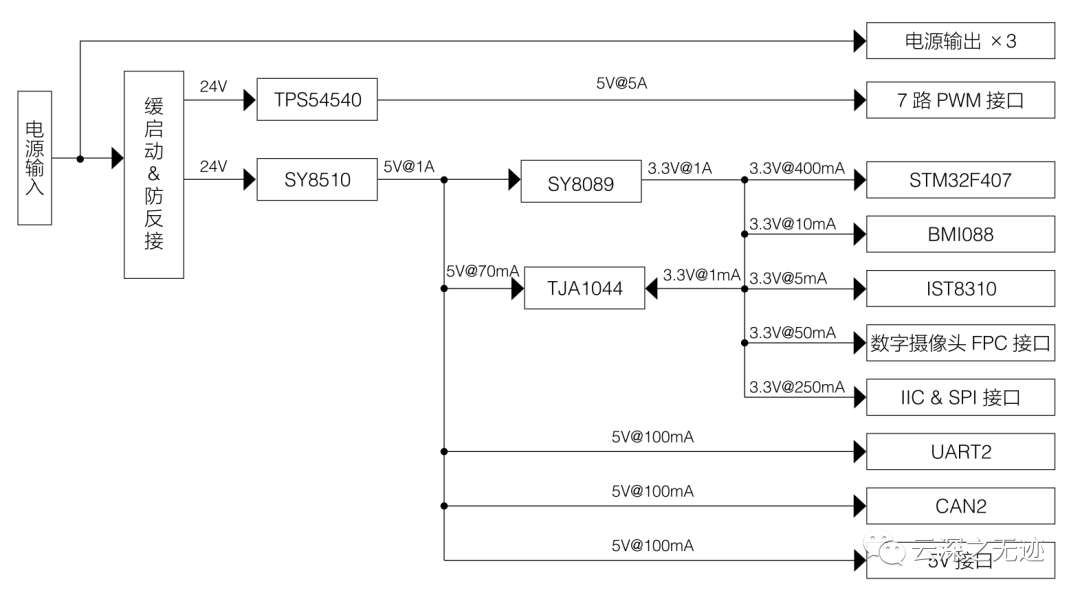
說(shuō)明書(shū)

看這個(gè)下一級(jí),其實(shí)就包括了電機(jī)的電源

完整的主供電
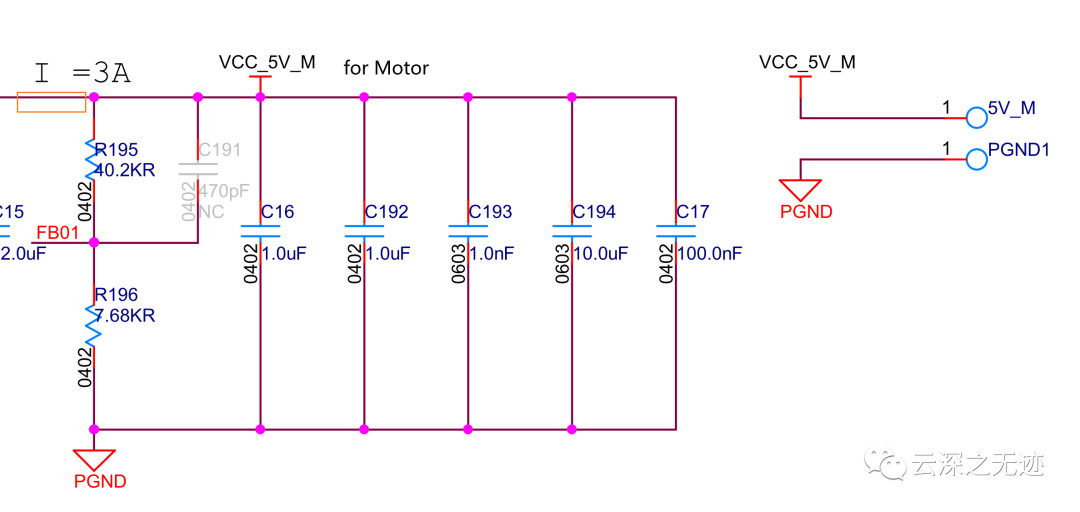
這個(gè)就是5V的鏈路
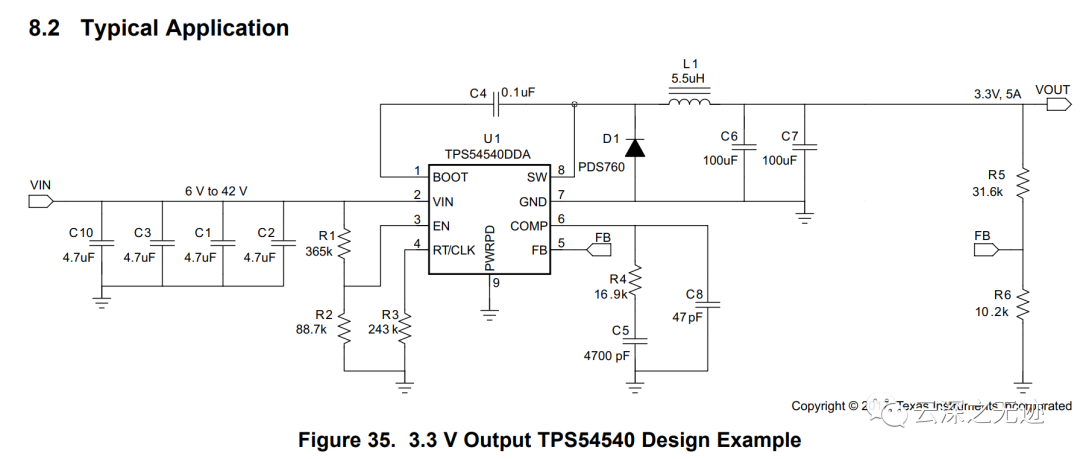
和參考電路一模一樣
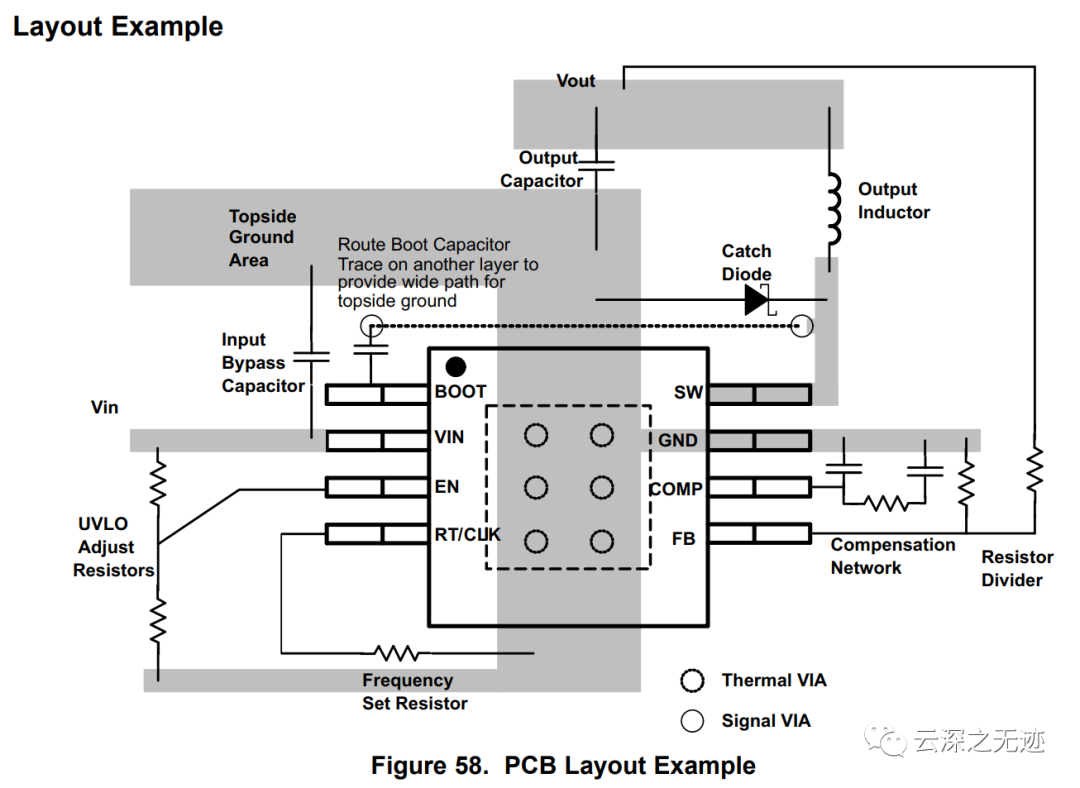
布線
應(yīng)該如何使用帶有模擬地 (AGND) 和電源地 (PGND) 的開(kāi)關(guān)穩(wěn)壓器?
這是許多設(shè)計(jì)開(kāi)關(guān)電源的開(kāi)發(fā)人員提出的問(wèn)題。一些開(kāi)發(fā)人員習(xí)慣于處理數(shù)字 GND 和模擬 GND;然而,當(dāng)涉及到電源 GND 時(shí),他們的經(jīng)驗(yàn)常常讓他們失望。然后,設(shè)計(jì)人員經(jīng)常復(fù)制所選開(kāi)關(guān)穩(wěn)壓器的電路板布局,然后不再考慮這個(gè)問(wèn)題。 PGND 是流過(guò)較高脈沖電流的接地連接。根據(jù)開(kāi)關(guān)穩(wěn)壓器拓?fù)洌@意味著通過(guò)功率晶體管的電流或功率驅(qū)動(dòng)級(jí)的脈沖電流。這對(duì)于開(kāi)關(guān)控制器(例如具有外部電源開(kāi)關(guān))的情況尤其重要。 AGND,有時(shí)稱(chēng)為 SGND(信號(hào)地),是其他通常非常平靜的信號(hào)用作參考的接地連接。這包括調(diào)節(jié)輸出電壓所需的內(nèi)部參考電壓。軟啟動(dòng)和使能電壓也參考 AGND 連接。 由于存在兩種不同的技術(shù)理念,因此專(zhuān)家們對(duì)于這兩種接地連接的處理也有不同的看法。 根據(jù)一種理念,開(kāi)關(guān)穩(wěn)壓器 IC 上的 AGND 和 PGND 連接應(yīng)在各自引腳旁邊相互連接。這使得兩個(gè)引腳之間的電壓偏移保持相對(duì)較低。因此,可以保護(hù)開(kāi)關(guān)調(diào)節(jié)器IC免受干擾甚至損壞。所有電路的接地連接和可能的接地平面都將鏈接到星形拓?fù)渲械倪@個(gè)公共點(diǎn)。
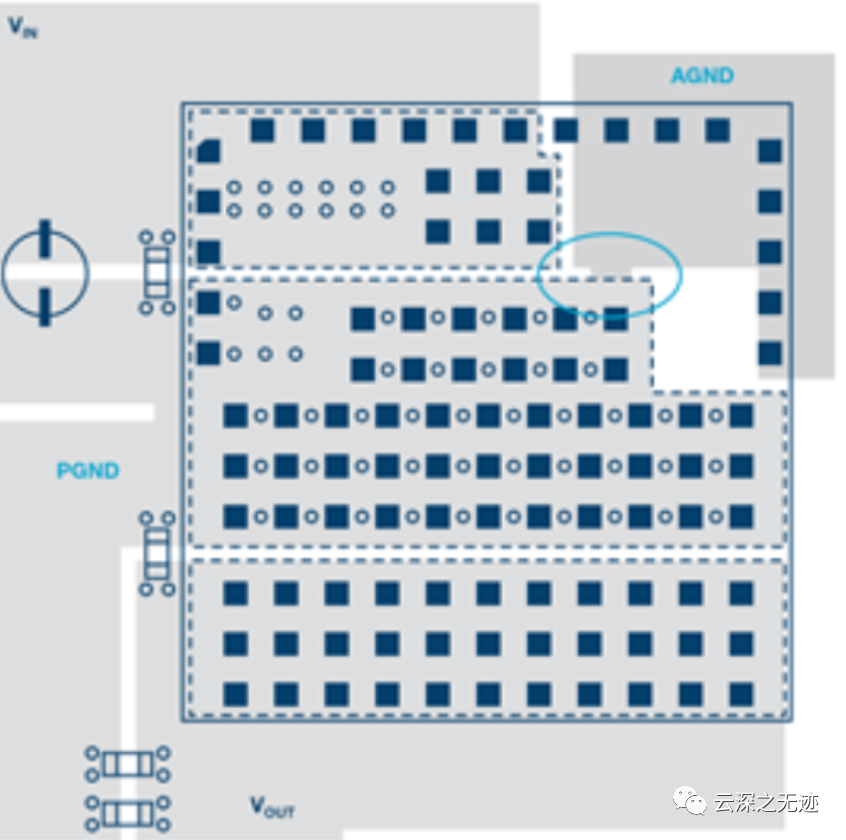
電路板布局顯示在這里。它是一個(gè)10A降壓微型模塊。電路板上單獨(dú)的接地連接彼此相鄰連接(參見(jiàn)圖中的藍(lán)色橢圓形)。由于硅片與外殼之間各自焊線的寄生電感,以及各自引腳的電感,PGND和AGND已經(jīng)有一定程度的去耦,導(dǎo)致電路之間的相互干擾量很小在硅上。 另一種理念涉及將電路板上的 AGND 和 PGND 額外分離成兩個(gè)單獨(dú)的接地層,并在一點(diǎn)上相互連接。通過(guò)這種連接,干擾信號(hào)(電壓偏移)大部分保留在 PGND 區(qū)域中,而 AGND 區(qū)域中的電壓保持非常平靜,并且與 PGND 很好地解耦。然而,其缺點(diǎn)是,根據(jù)脈沖電流的瞬變和電流強(qiáng)度,各個(gè)引腳上的 PGND 和 AGND 之間可能存在顯著的電壓偏移。這可能導(dǎo)致開(kāi)關(guān)穩(wěn)壓器 IC 功能異常,甚至損壞。下圖顯示了這一理念的實(shí)現(xiàn)。
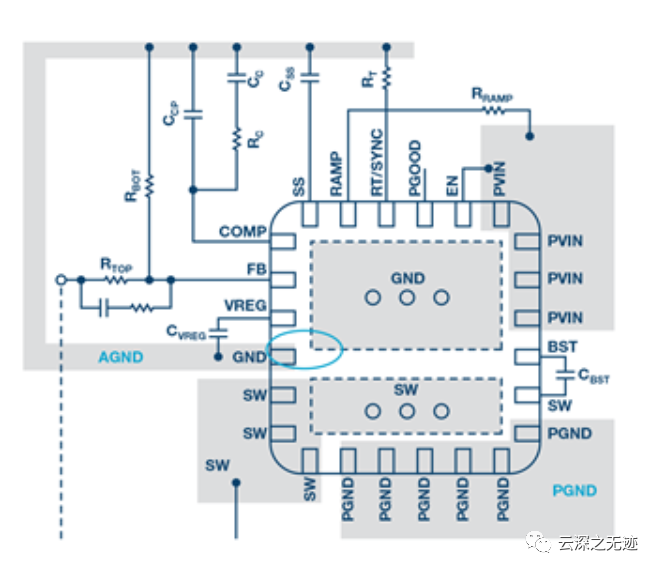
分開(kāi)連接
然后就是馬總發(fā)了個(gè)好玩的:
一塊走的快讓我迷茫的板子
原來(lái)是樂(lè)天派的機(jī)器人
早年這個(gè)EMO是ESP32做的,9美元的零頭都能買(mǎi)三塊ESP32
蚌湖住了
讓上面的PWM接口輸出一下:
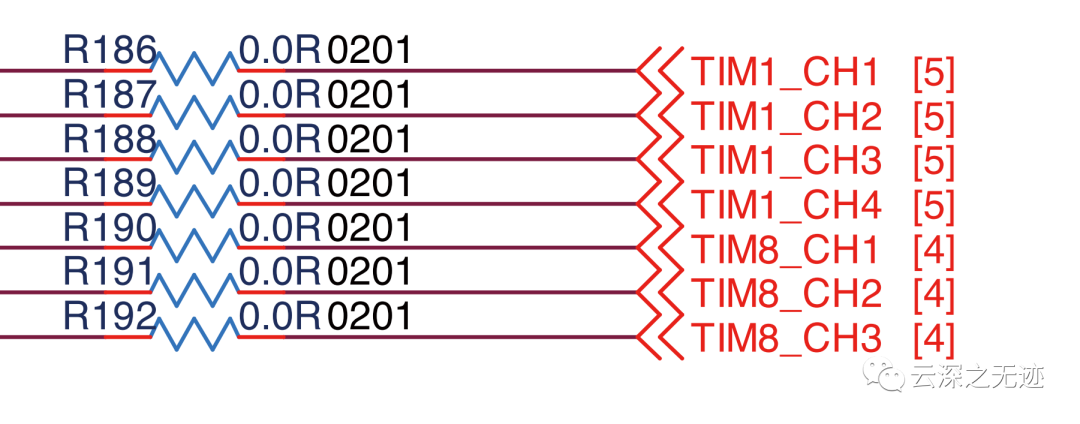
原理圖的連接是這樣的
TIM8
TIM1

PWM 占空比最小為 500/20000 即 2.5%,對(duì)應(yīng)高電平時(shí)間為 20ms 乘以 2.5%等于 0.5ms,最大為 2000/20000 即 10%,對(duì)應(yīng)高電平時(shí)間20ms 乘以 10%等于 2ms。
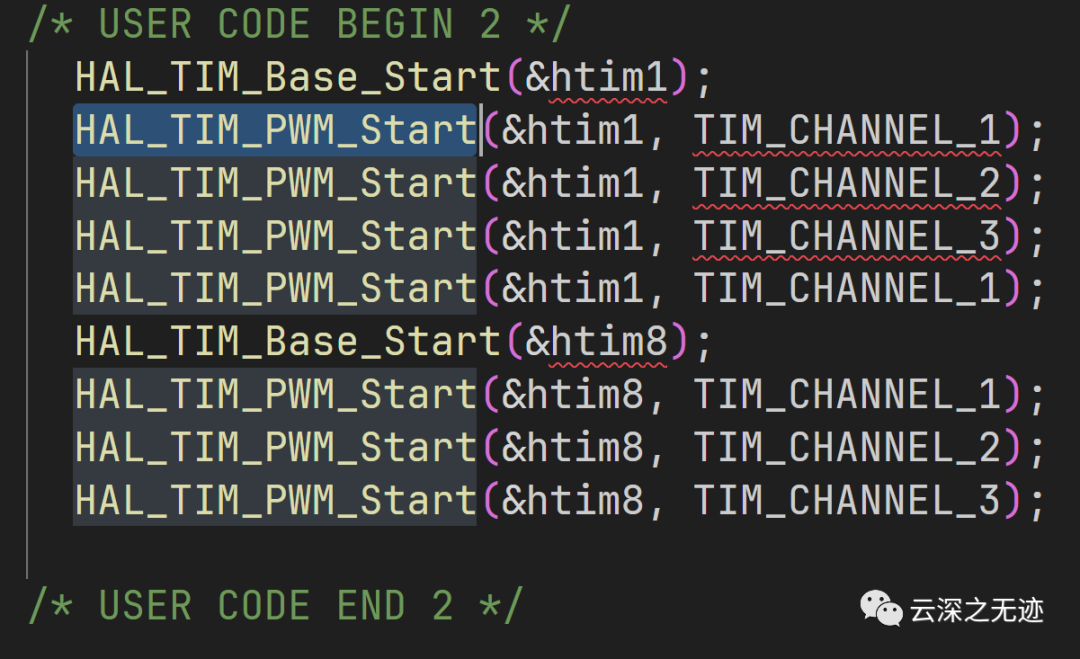
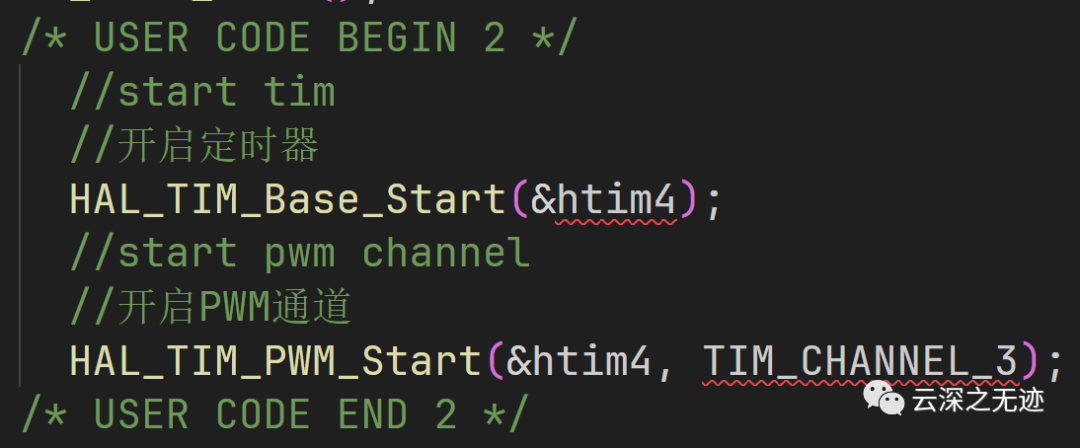
先開(kāi)啟總的定時(shí)器,然后在打開(kāi)里面的通道
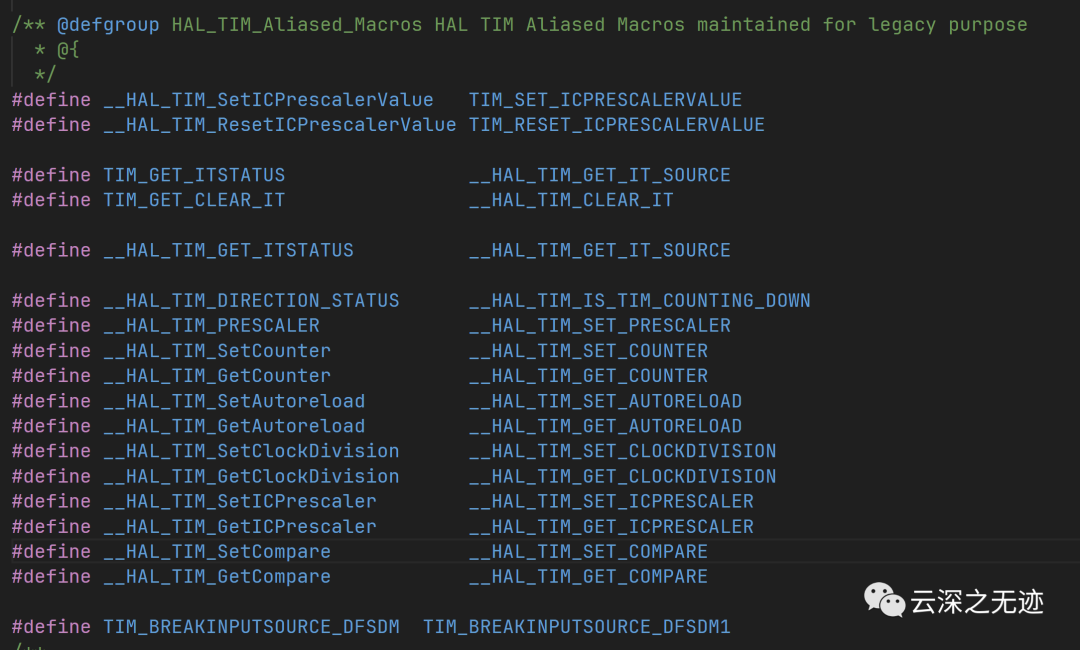
后面操作的捕獲寄存器,為什么是宏呢?這里寫(xiě)的是為了歷史的遺留

其實(shí)實(shí)現(xiàn)的時(shí)候也是在這里
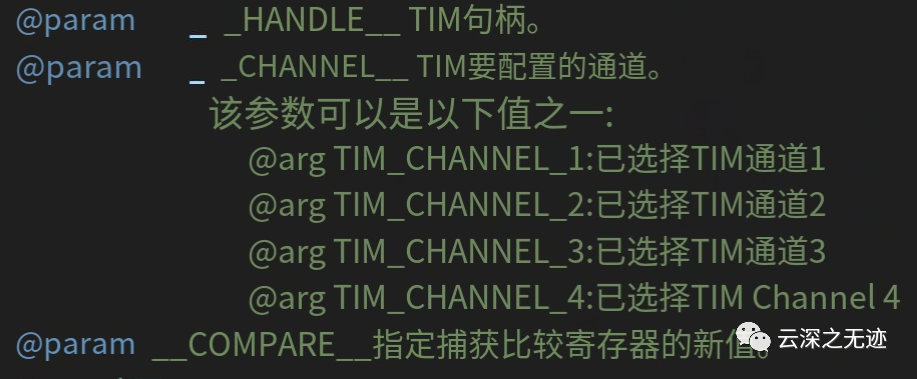
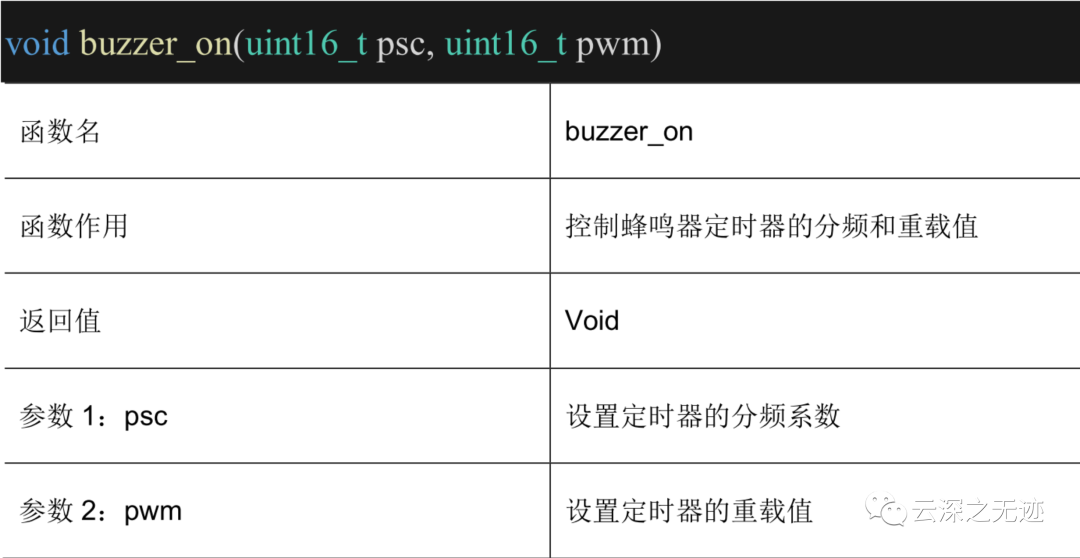
參數(shù)
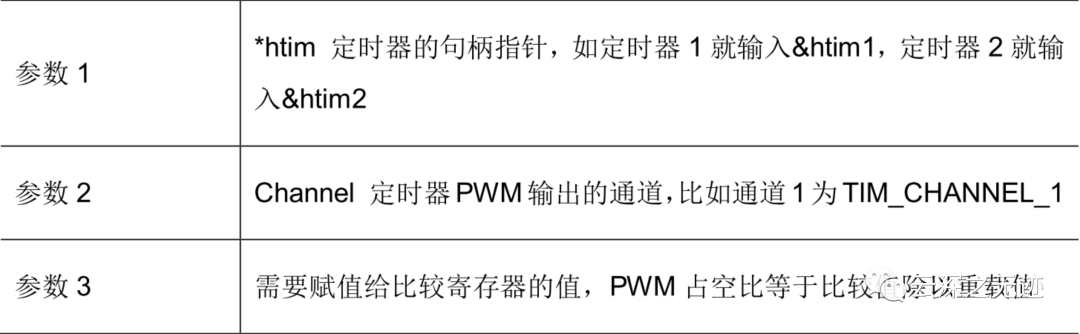
具體的意思
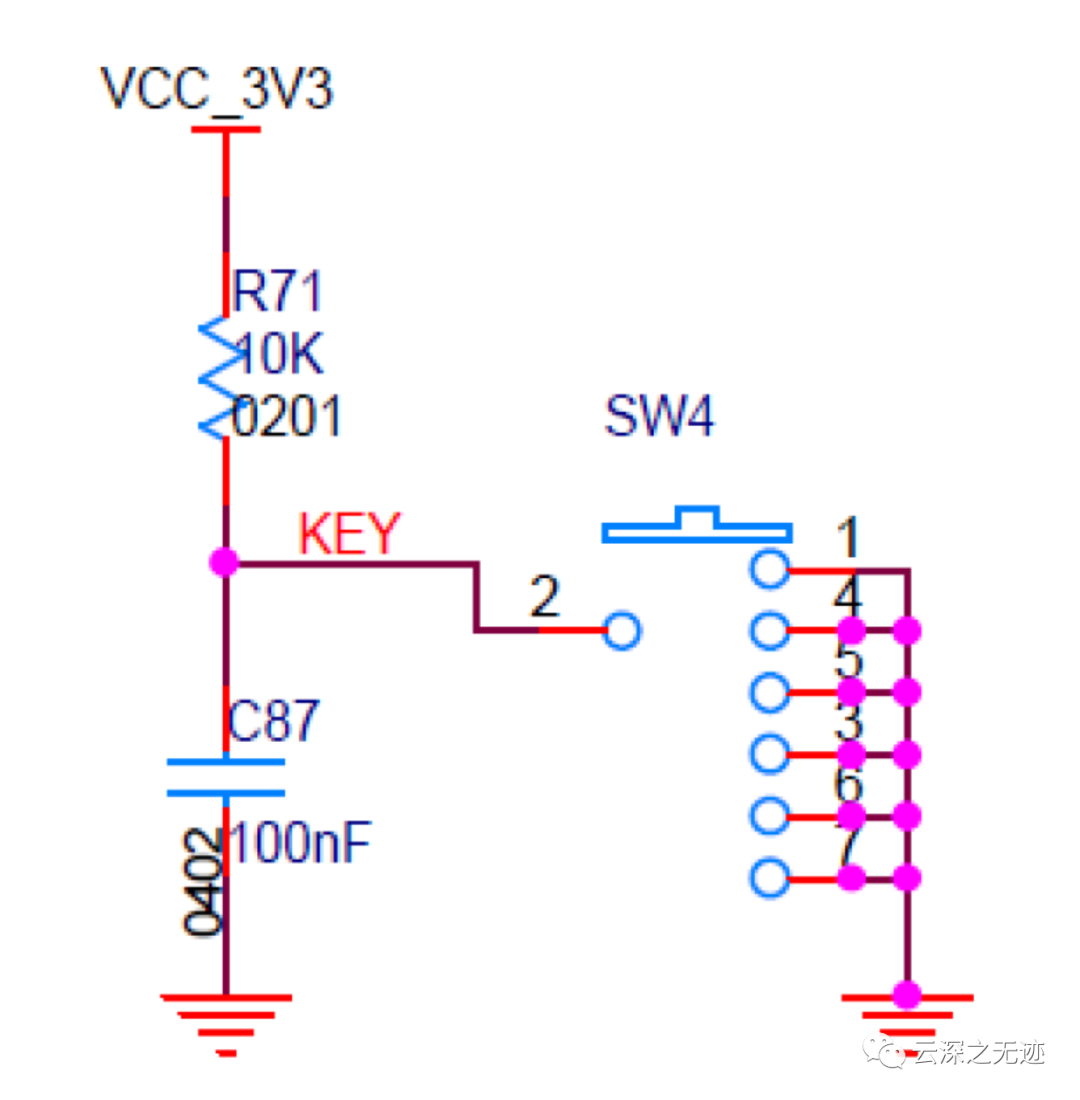
按鍵電路
在這里
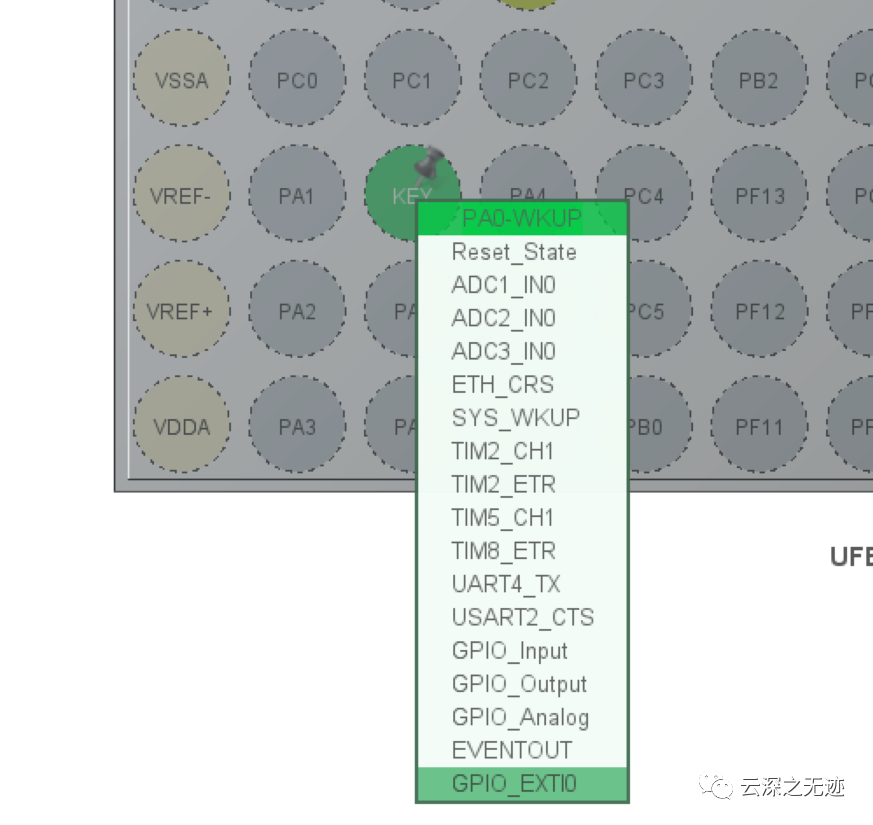
選一個(gè)感知的引腳
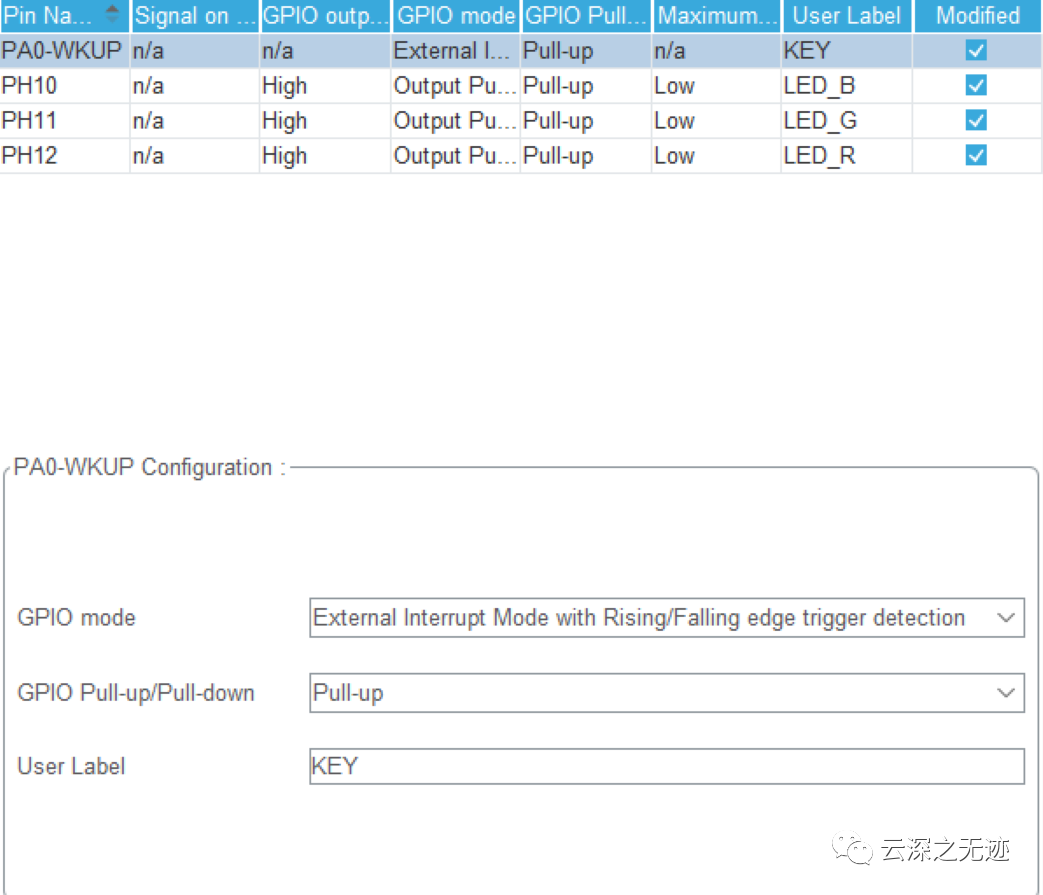
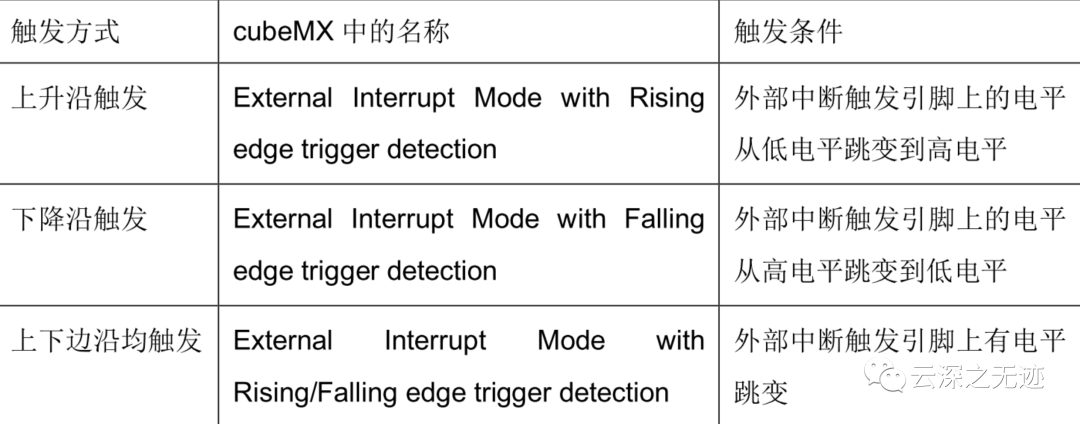
設(shè)置一下觸發(fā)

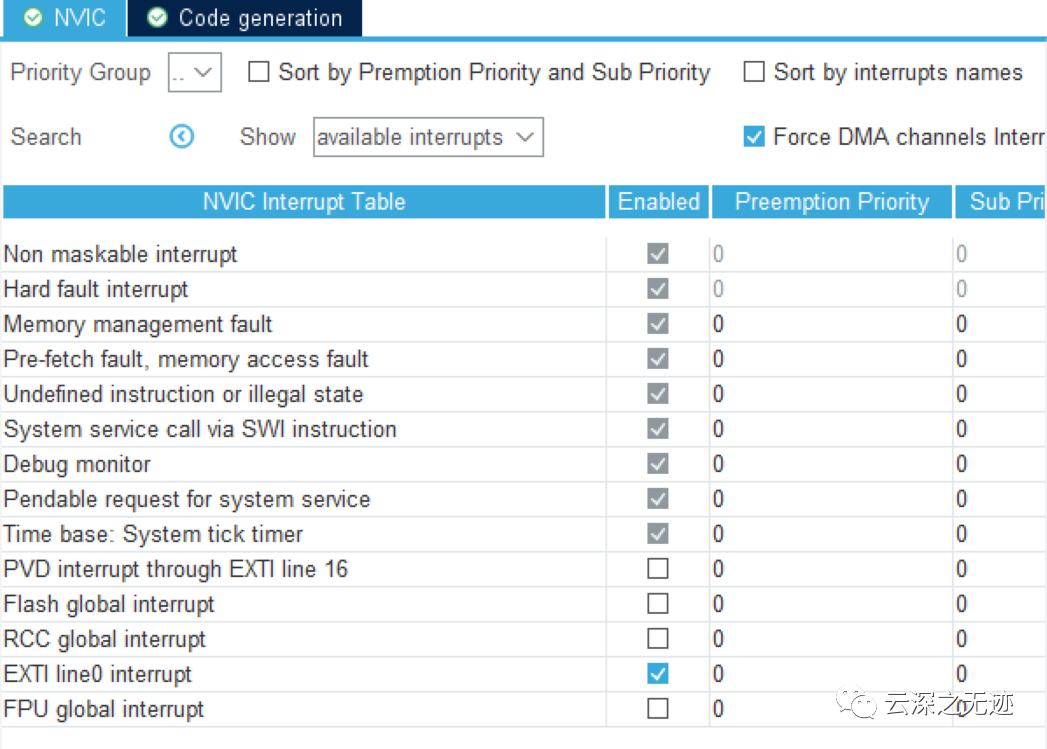
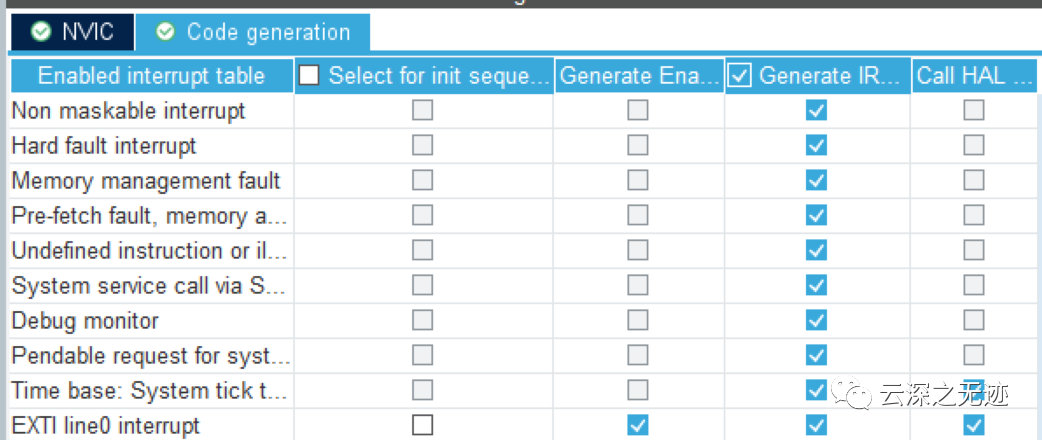
所有地方的中斷全都打開(kāi)了
函數(shù)簽名
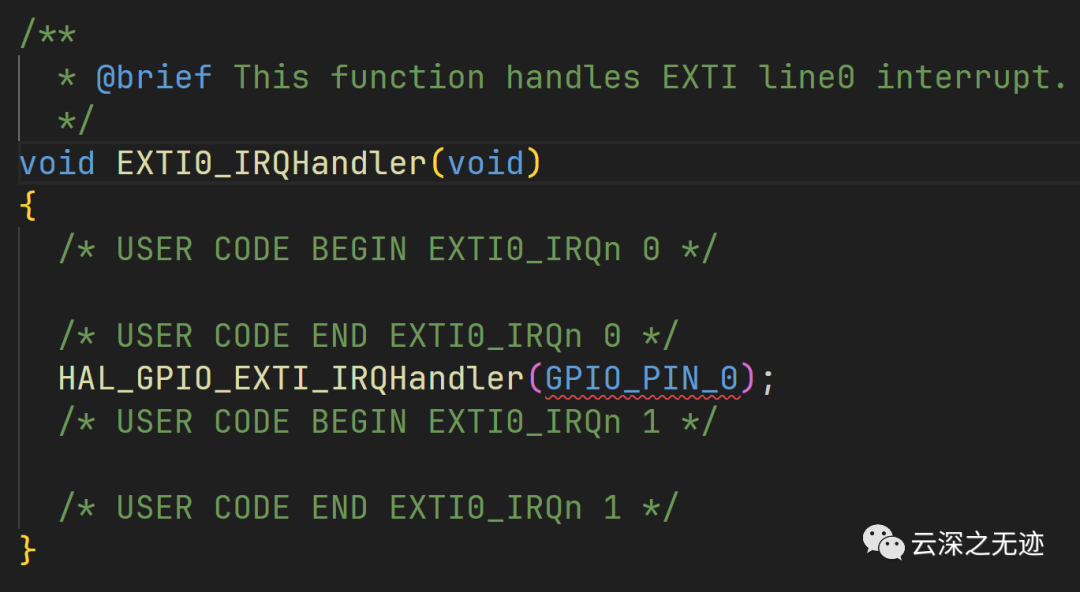
這個(gè)就是在it文件的中斷口
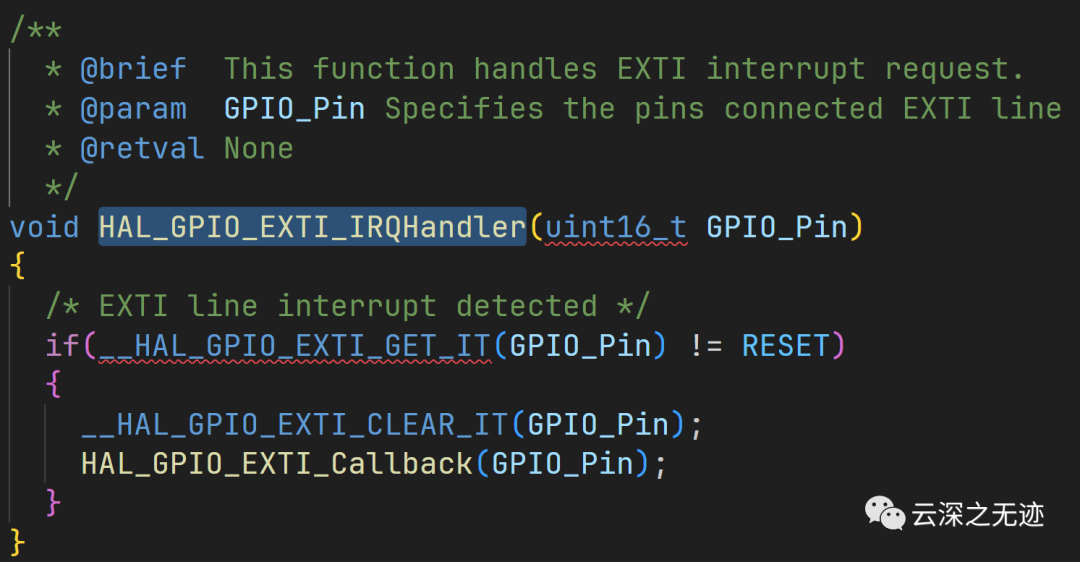
在響應(yīng)以后會(huì)跳轉(zhuǎn)到這里,判斷引腳的真實(shí)情況
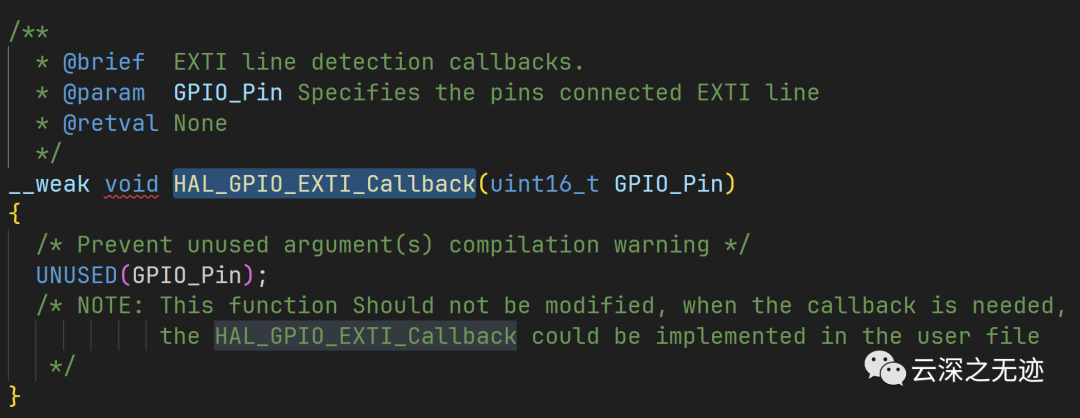
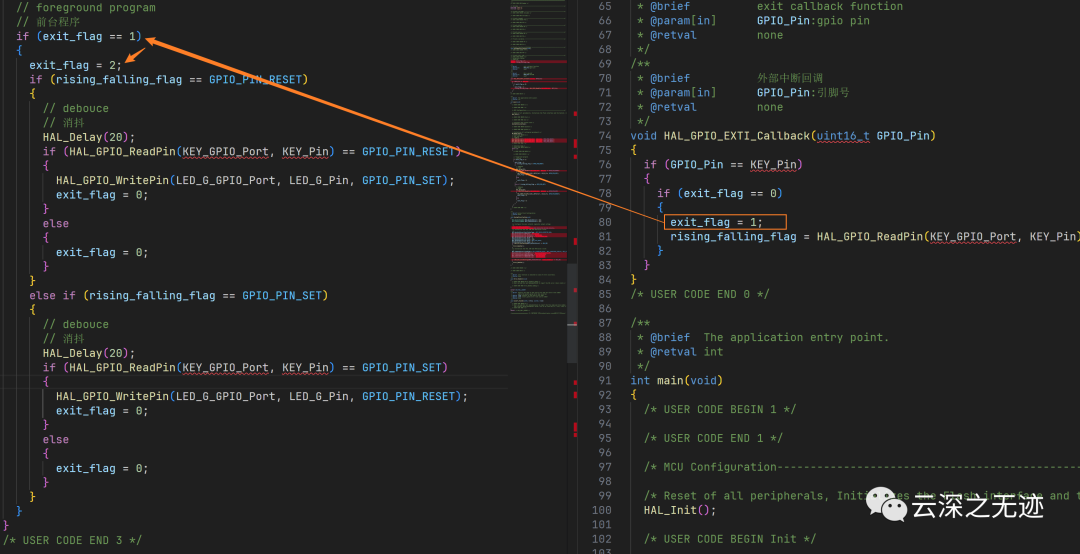
接著就是到了回調(diào)的函數(shù)口,這里是弱定義,還是看自己的實(shí)現(xiàn)
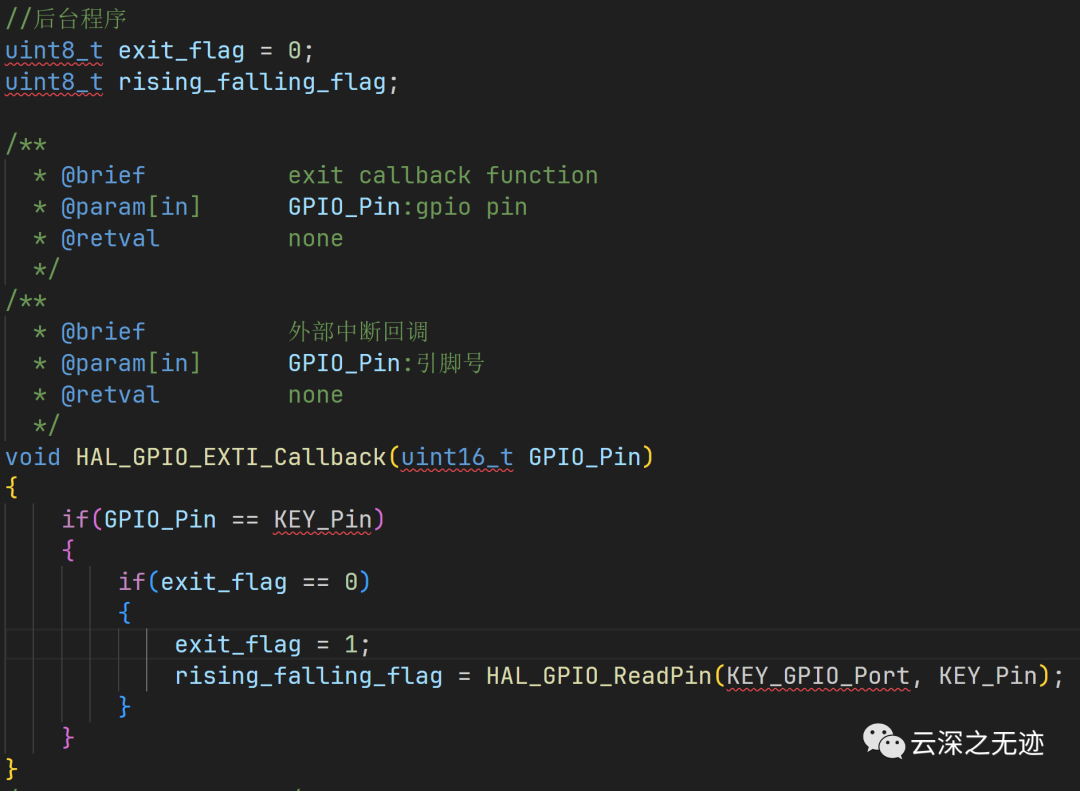
如果是按鍵響應(yīng)了,就看看標(biāo)志位
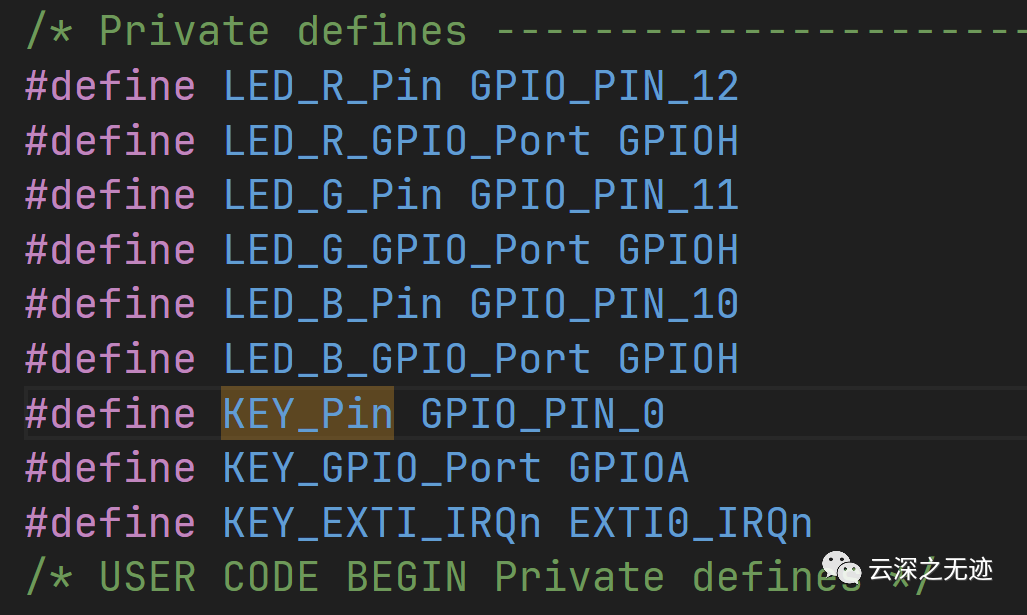
這些就是我們所有用到的引腳
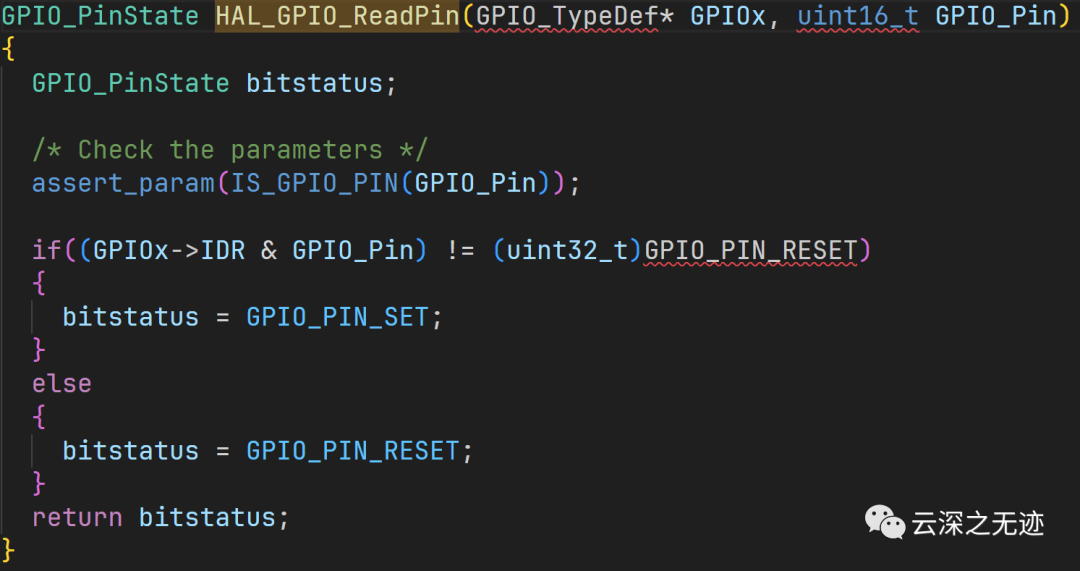
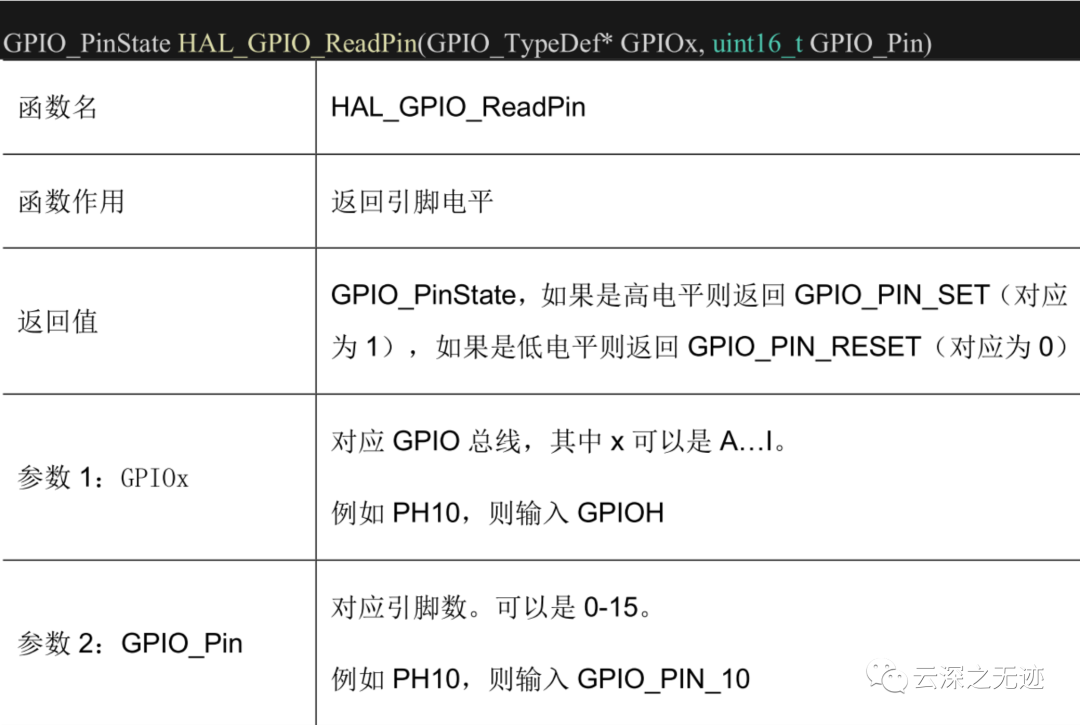
這個(gè)函數(shù)是讀取一個(gè)引腳的狀態(tài)的
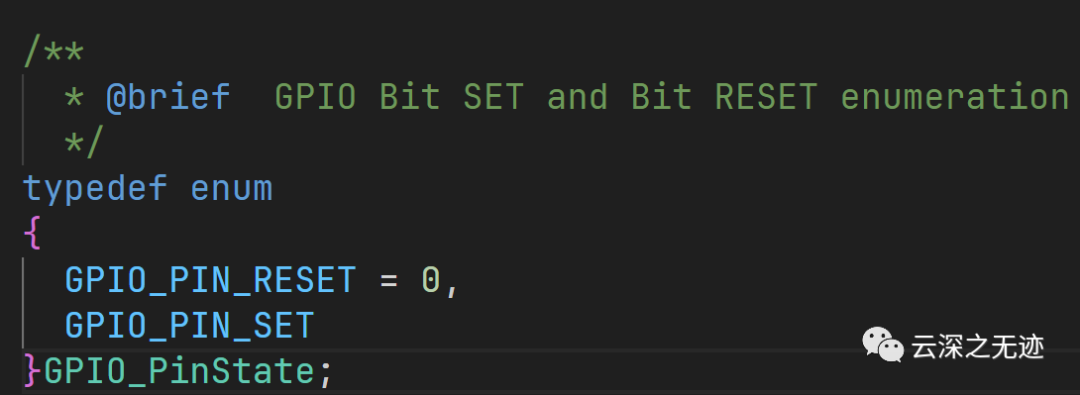
返回的就是頭文件這些
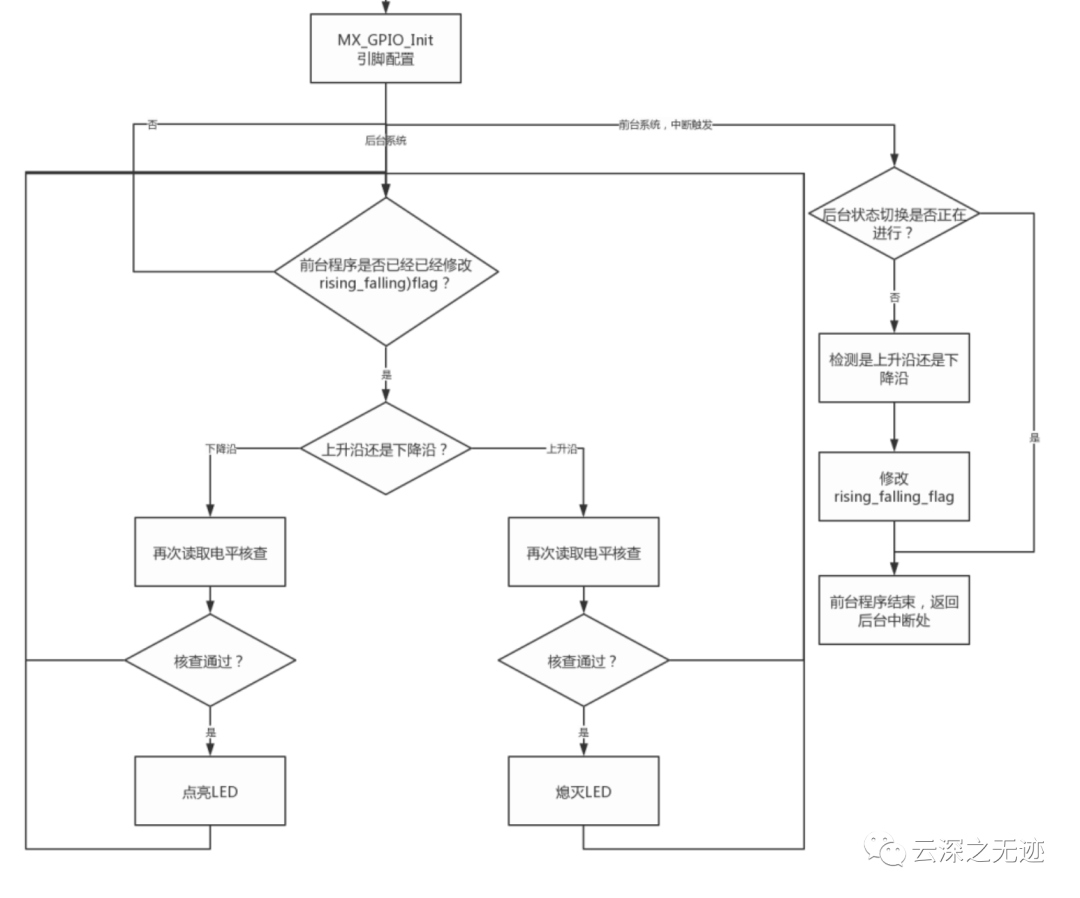
上面的是后臺(tái)程序,就是簡(jiǎn)單的知道按鍵有沒(méi)有動(dòng)
真實(shí)的邏輯是這樣的:
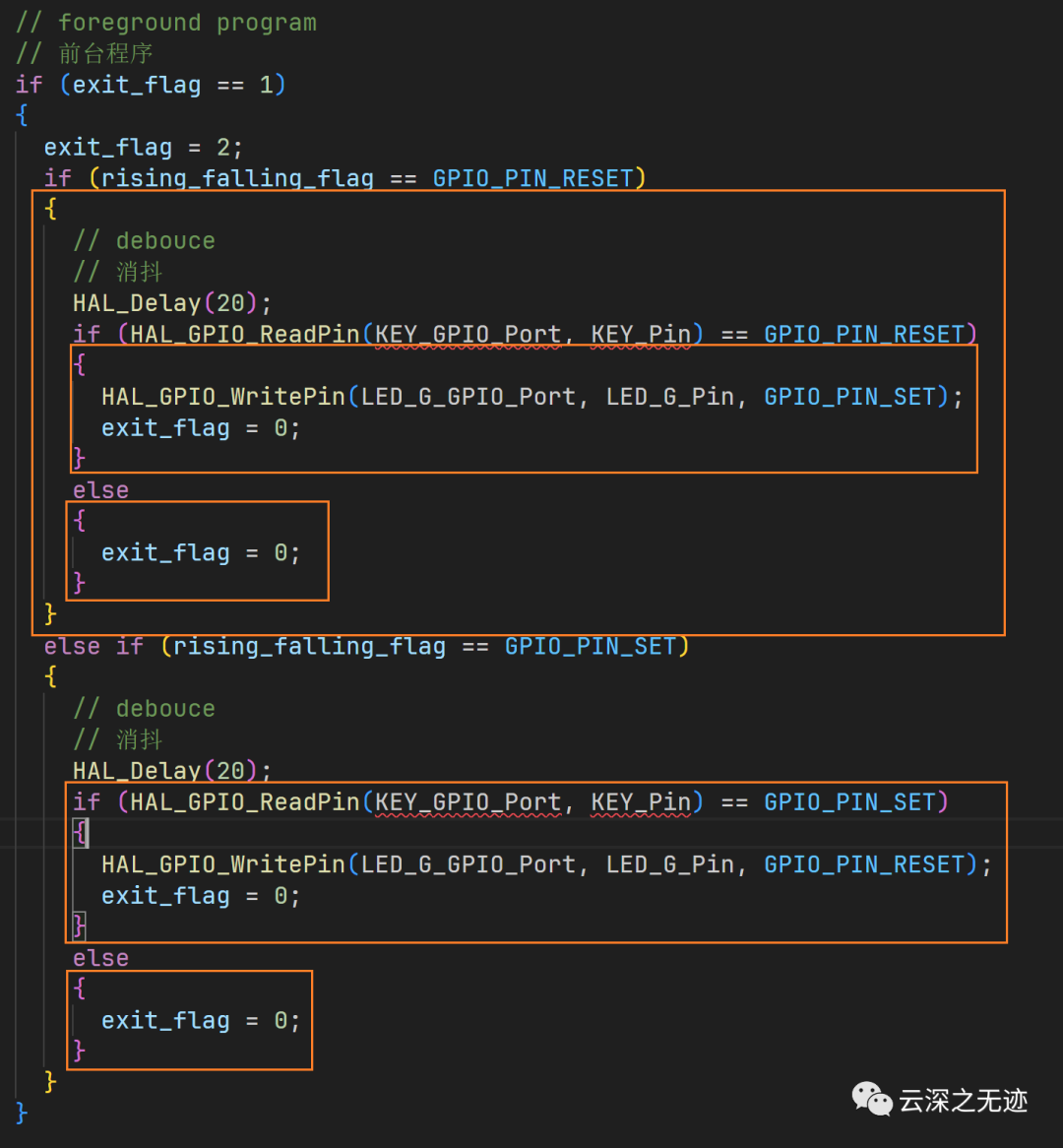
知道引腳的這個(gè)狀態(tài)
然后就是等一會(huì)兒
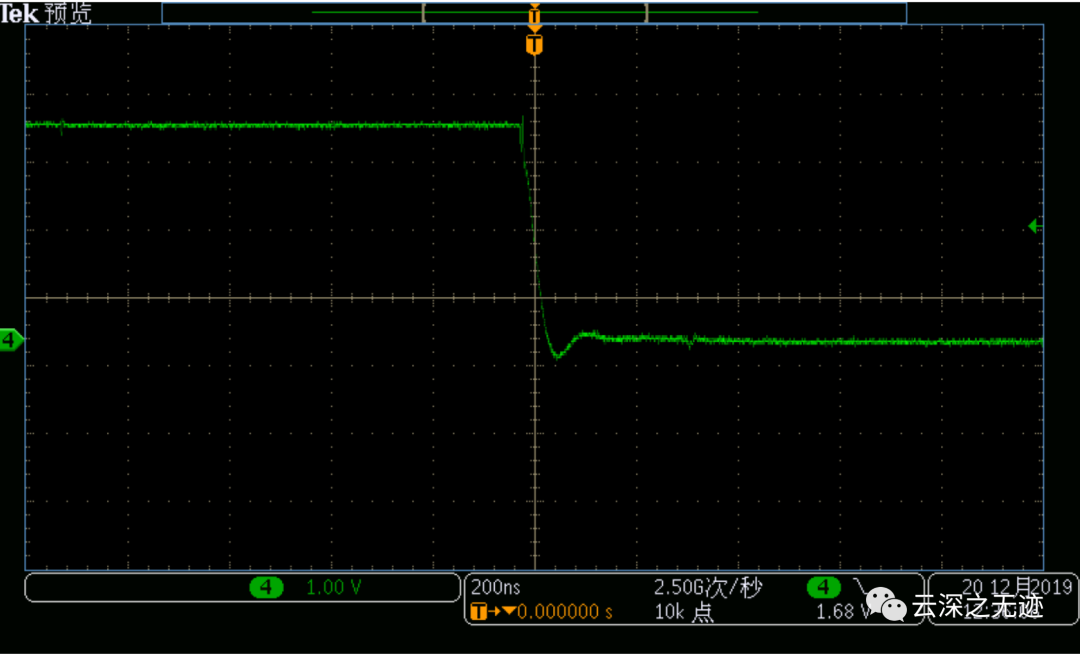
dji用的是Tek的示波器

采樣是比較簡(jiǎn)單的一步,而比較與轉(zhuǎn)換的方法,STM32 采用的是逐次逼近法,在STM32F4中是12位逐次逼近型ADC (SAR-ADC) ,下面以一個(gè)信號(hào)在3位逼近法中的比較過(guò)程為例講解比較過(guò)程 首先你要知道的是,在3位逼近法中,可以認(rèn)為ADC在未轉(zhuǎn)換之前的值是一個(gè)3位二進(jìn)制數(shù),這3位二進(jìn)制數(shù)字存儲(chǔ)的數(shù)值取決于這3位比較的出來(lái)的值:
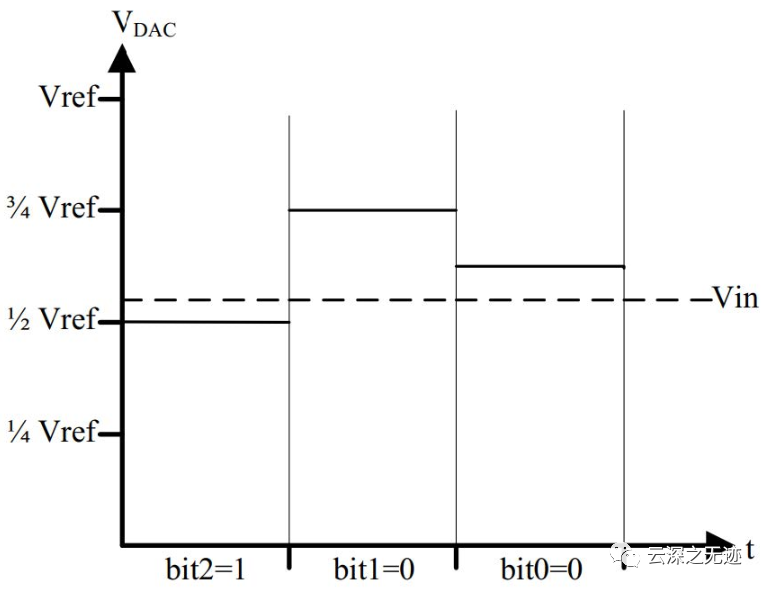
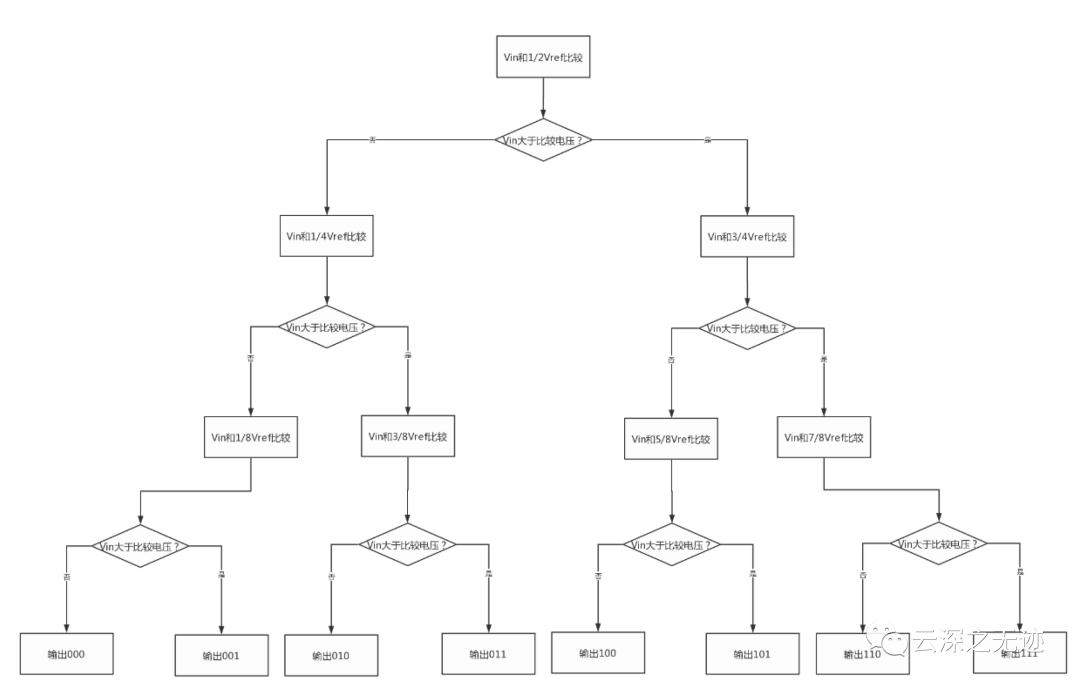
采樣到模擬信號(hào)的值之后: 1.首先與內(nèi)部參考電壓 Vref 的 1/2 進(jìn)行比較。發(fā)現(xiàn)大于其值,則將第一個(gè)標(biāo)志位記為1;反之為0由于大于 1/2 Vref 值,所以下一個(gè)比較的值為 1/2 + 1/4 = 3/4 Vref 2.然后與Verf 的 3/4 進(jìn)行比較。發(fā)現(xiàn)小于其值,則將第二個(gè)標(biāo)志位記為0由于小于 3/4 Vref 值,所以下一個(gè)比較的值為 3/4 - 1/8 = 5/8 Vref 3.然后與Vref 的 5/8 進(jìn)行比較。發(fā)現(xiàn)小于其值,則將第三個(gè)標(biāo)志位記為0 所以輸出的的結(jié)果為100,其對(duì)照的結(jié)果為 1/2 Vref。如果是12位逼近的方法,這樣的過(guò)程需要經(jīng)過(guò)12次,輸出一串12位的二進(jìn)制數(shù),然后轉(zhuǎn)化為數(shù)值,其完整流程如下:
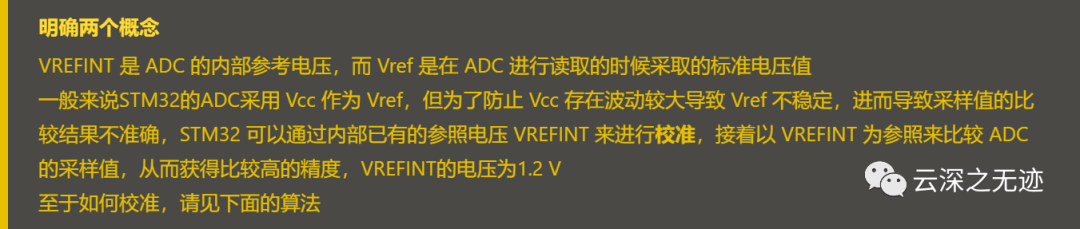
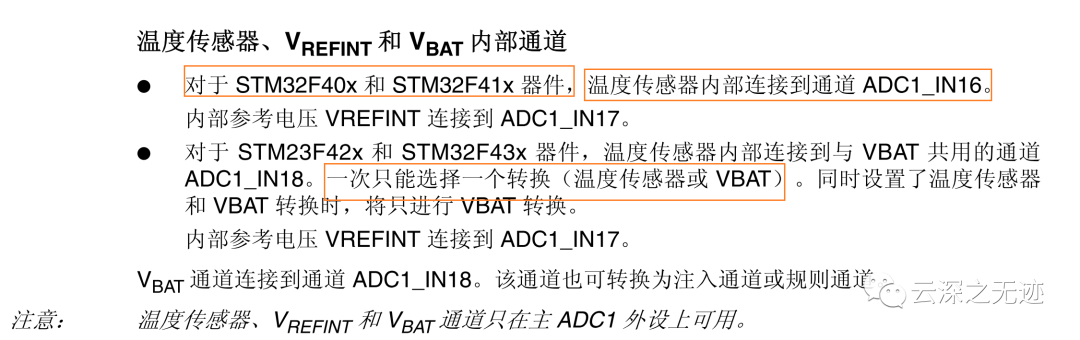
一般 ADC 的位數(shù)越多則轉(zhuǎn)換精度越高,但與此同時(shí)轉(zhuǎn)換的速度也會(huì)變慢。此外,STM32 內(nèi)部有一個(gè)校準(zhǔn)電壓VREFINT ,電壓為1.2 V,當(dāng)供電電壓不為 3.3 V,可以使用內(nèi)部的 VREFINT 通道采集1.2 V電壓作為 Vref,以提高精度。

這個(gè)是DJI的文檔
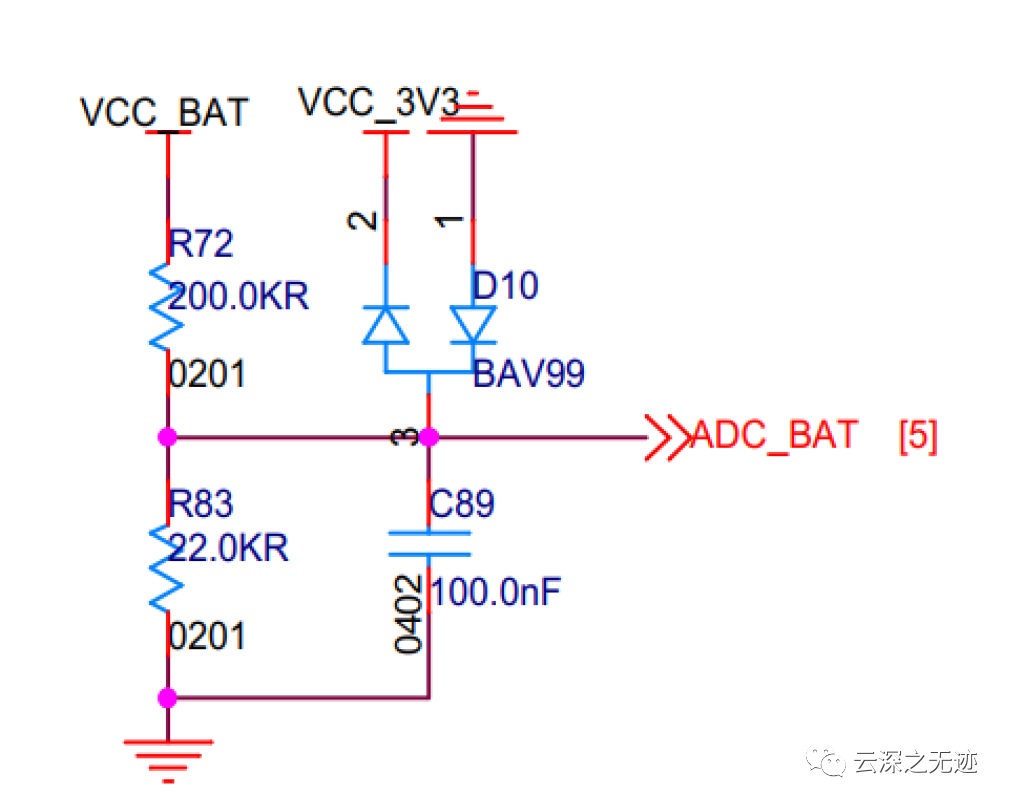
在開(kāi)發(fā)板中有一個(gè)用于讀取電池電壓使用的電阻分壓電路。由于電池提供的電源是24 V的高電壓,而單片機(jī)引腳的耐壓只有0~3.3 V,所以需要通過(guò)分壓電路進(jìn)行處理,并使用濾波和二極管限幅電路進(jìn)行保護(hù)。
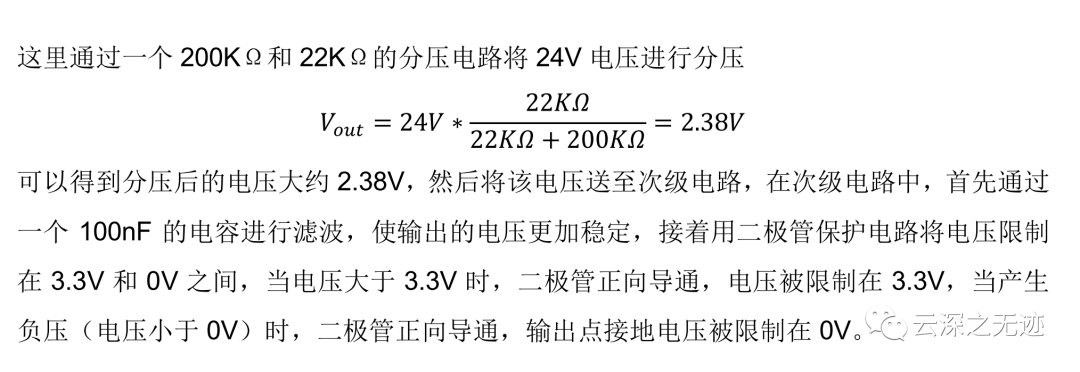
管球它,拼拼湊湊的就可以看了
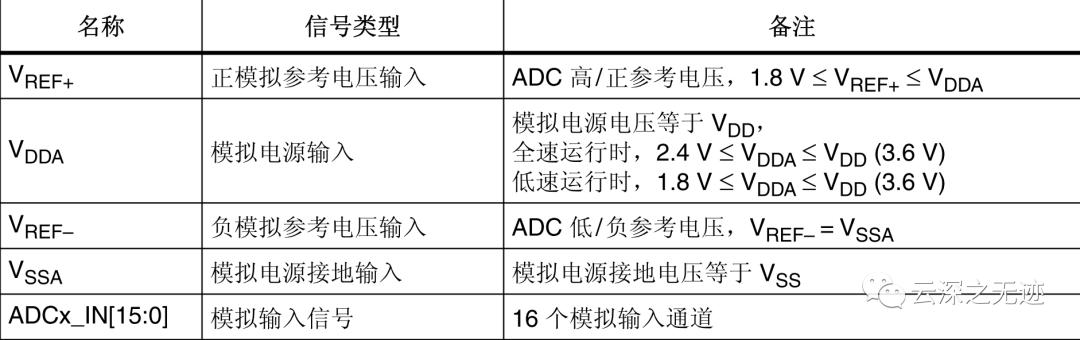
輸入的電壓范圍是這樣的
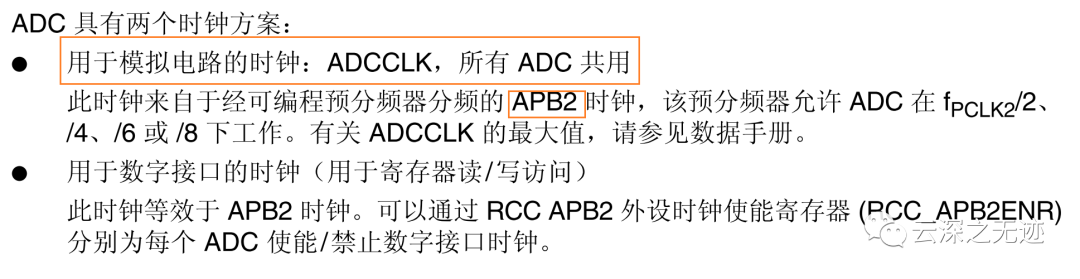
時(shí)鐘
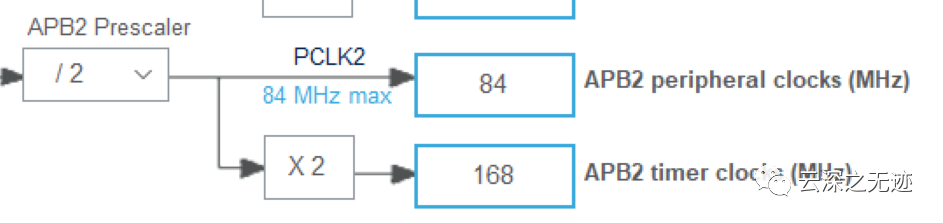
在MX里面的設(shè)置
今天有事情,寫(xiě)不完了,跑了。
DJI的文檔也是抄的別人的,,,沒(méi)事,我也抄。
審核編輯:湯梓紅
-
寄存器
+關(guān)注
關(guān)注
31文章
5425瀏覽量
123559 -
PWM
+關(guān)注
關(guān)注
116文章
5409瀏覽量
218309 -
時(shí)鐘
+關(guān)注
關(guān)注
11文章
1886瀏覽量
132912 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3289瀏覽量
117370
原文標(biāo)題:?Robomaster C板再體驗(yàn)
文章出處:【微信號(hào):TT1827652464,微信公眾號(hào):云深之無(wú)跡】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
RoboMaster全新開(kāi)發(fā)板套件發(fā)布,助力機(jī)器人愛(ài)好者開(kāi)發(fā)!
RoboMaster開(kāi)發(fā)板C型學(xué)習(xí)筆記 精選資料分享
RoboMaster開(kāi)發(fā)板C型學(xué)習(xí)筆記 精選資料推薦
從STM32開(kāi)始的RoboMaster
如何用Robomaster C610/820R電調(diào)組成伺服電機(jī)控制系統(tǒng)?
從STM32開(kāi)始的RoboMaster簡(jiǎn)介
RoboMaster 6623 電調(diào)使用說(shuō)明
中南大學(xué)FYT機(jī)器人戰(zhàn)隊(duì)超級(jí)電容開(kāi)發(fā)經(jīng)驗(yàn)記錄及分享(ROBOMASTER)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論