") 基于RT-Thread的RoboMaster電控框架(四)
基于RT-Thread的RoboMaster電控框架(四)

背景
使用的開發(fā)板為大疆的 RoboMaster-C 型開發(fā)板,基礎工程為 rt-thread>bsp>stm32f407-robomaster-c
IMU姿態(tài)解算
使用 BMI088 robomaster-c 開發(fā)板上集成的6軸 imu 進行姿態(tài)解算,使用的方案其實是RM中比較普遍成熟的一套,主要使用了四元數(shù)和卡爾曼濾波進行融合解算,解算頻率為 1Khz。
dt = dwt_get_delta(&ins_dwt);
imu_ops.gyro_read(ins.gyro);
imu_ops.accel_read(ins.accel);
// 核心函數(shù),EKF更新四元數(shù)
IMU_QuaternionEKF_Update(ins.gyro[X], ins.gyro[Y], ins.gyro[Z], ins.accel[X], ins.accel[Y], ins.accel[Z], dt);
memcpy(ins.q, QEKF_INS.q, sizeof(QEKF_INS.q));
// 機體系基向量轉換到導航坐標系,本例選取慣性系為導航系
BodyFrameToEarthFrame(xb, ins.xn, ins.q);
BodyFrameToEarthFrame(yb, ins.yn, ins.q);
BodyFrameToEarthFrame(zb, ins.zn, ins.q);
// 將重力從導航坐標系n轉換到機體系b,隨后根據(jù)加速度計數(shù)據(jù)計算運動加速度
float gravity_b[3];
EarthFrameToBodyFrame(gravity, gravity_b, ins.q);
for (uint8_t i = 0; i < 3; ++i) // 同樣過一個低通濾波
{
ins.motion_accel_b[i] = (ins.accel[i] - gravity_b[i]) * dt / (ins.accel_lpf + dt) + ins.motion_accel_b[i] * ins.accel_lpf / (ins.accel_lpf + dt);
}
BodyFrameToEarthFrame(ins.motion_accel_b, ins.motion_accel_b, ins.q); // 轉換回導航系n
ins.yaw = QEKF_INS.Yaw;
ins.pitch = QEKF_INS.Pitch;
ins.roll = QEKF_INS.Roll;
ins.yaw_total_angle = QEKF_INS.YawTotalAngle;
恒溫控制
C型開發(fā)板上的 BMI088 周圍是又一圈加熱電阻的,可以通過 PWM 控制加熱功率,從而實現(xiàn)恒溫控制,有助于抑制陀螺儀漂移,根據(jù)手冊提示恒溫控制在40攝氏度較好,
static pid_obj_t *imu_temp_pid;
static pid_config_t imu_temp_config = {
.Kp = 50000,
.Ki = 8000,
.Kd = 0,
.IntegralLimit = 50000,
.Improve = PID_Integral_Limit,
.MaxOut = 250000,
};
static rt_err_t temp_pwm_init(rt_uint32_t period, rt_uint32_t pulse)
{
temp_pwm_dev = (struct rt_device_pwm )rt_device_find(TEMP_PWM_DEV_NAME);
if (temp_pwm_dev == RT_NULL)
{
LOG_E("Can't find %s device!", TEMP_PWM_DEV_NAME);
return -RT_ERROR;
}
/ 設置PWM周期和脈沖寬度默認值 /
rt_pwm_set(temp_pwm_dev, TEMP_PWM_DEV_CHANNEL, period, pulse);
/ 使能設備 */
rt_pwm_enable(temp_pwm_dev, TEMP_PWM_DEV_CHANNEL);
}
在 ins_task 中以 500hz 的頻率進行恒溫控制,需要注意,使用加熱電阻外圍電路需要給C板額外供電。
void ins_thread_entry(void argument)
{
static uint32_t count;
temp_pwm_init(period, pulse);
/ 注冊 PID 實例 */
imu_temp_pid = pid_register(&imu_temp_config);
imu_ops.imu_init();
LOG_I("Example Task Start");
for (;;)
{
example_start = dwt_get_time_ms();
imu_ops.gyro_read(gyro);
imu_ops.accel_read(acc);
if(count % 2 == 0){
temp = imu_ops.temp_read();
pulse = pid_calculate(imu_temp_pid, temp, IMU_TARGET_TEMP);
rt_pwm_set_pulse(temp_pwm_dev, TEMP_PWM_DEV_CHANNEL, pulse);
}
count++;
rt_thread_delay(1);
}
}
實際效果測試如下:
不加恒溫控制,室溫下(23攝氏度左右)十分鐘內,yaw 軸偏移近20度;
加入恒溫控制后(40攝氏度),十分鐘內,yaw 軸偏移10度
arm_math庫使用
有一個小插曲就是arm_math庫的移植使用,需要通過修改 Scons 文件,將 arm_math 庫鏈接到工程中,并添加需要的宏定義:
使用 arm_math.h 需要添加相關內核定義
CPPDEFINES = ['ARM_MATH_CM4']
LIBPATH = [cwd + '/arm_math']
LIBS = ['libarm_cortexM4lf_math.a']
path += [cwd + '/arm_math']
group = DefineGroup('RM_Algorithms', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES, LIBS = LIBS, LIBPATH=LIBPATH)
到此就可以使用解算得到的歐拉角等數(shù)據(jù)去對云臺等進行閉環(huán)控制啦。
存在問題及優(yōu)化方向
雖然通過陀螺儀校準和恒溫控制等有效抑制了零漂,但yaw的零飄依然存在;
之后考慮通過融合磁力計數(shù)據(jù),解決零飄問題;
-
PWM控制器
+關注
關注
19文章
560瀏覽量
37069 -
卡爾曼濾波
+關注
關注
3文章
166瀏覽量
25065 -
STM32F407
+關注
關注
15文章
188瀏覽量
30531 -
RT-Thread
+關注
關注
32文章
1398瀏覽量
41819 -
姿態(tài)解算
+關注
關注
0文章
49瀏覽量
8481
發(fā)布評論請先 登錄
基于RT-Thread的RoboMaster電控框架設計
RT-Thread編程指南
RT-Thread全球技術大會:RT-Thread上的單元測試框架與運行測試用例
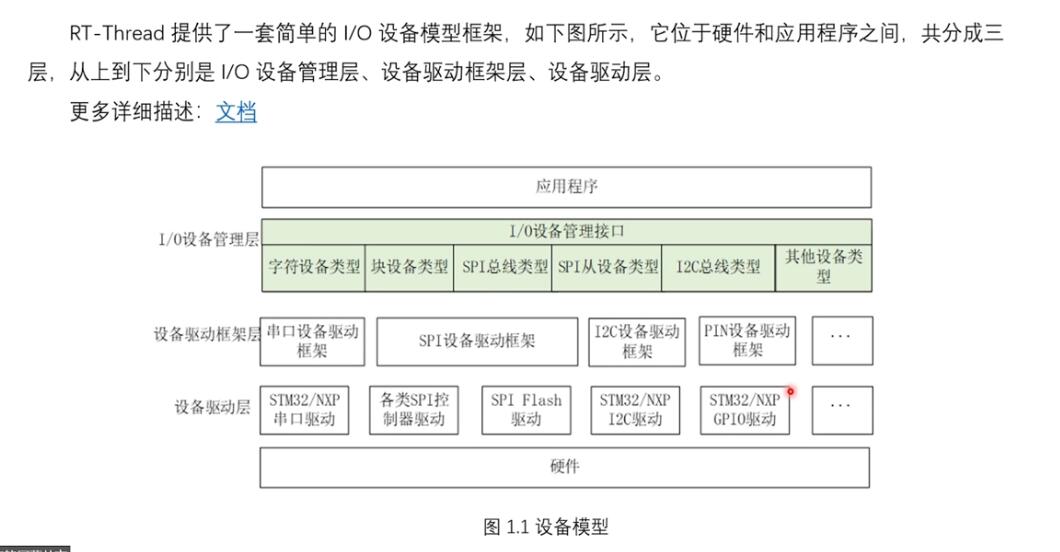
RT-Thread設備模型框架及創(chuàng)建注冊設備的實現(xiàn)

淺析RT-Thread設備驅動框架
基于 RT-Thread 的 RoboMaster 電控框架(一)
基于RT-Thread的RoboMaster電控框架(二)
基于RT-Thread的RoboMaster電控框架(三)
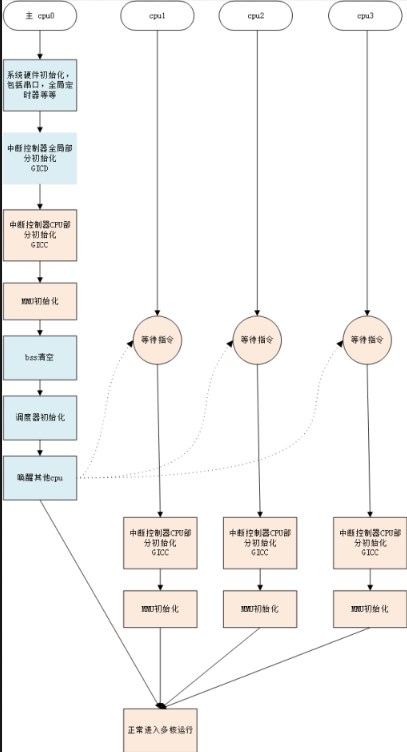
RT-Thread框架下的SMP支持
基于rt-thread的socket通信設計






 工商網監(jiān)
工商網監(jiān)
評論