 CAN FD報文時間計算
CAN FD報文時間計算
可以根據波特率算出不同類型報文時間,計算公式如下:
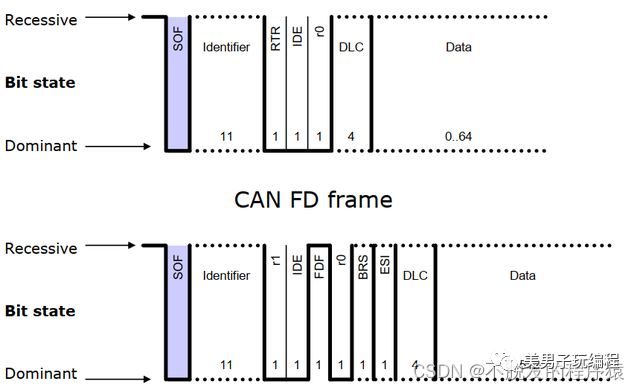
報文時間 = 仲裁域位時間 * 仲裁域位數 + 數據域位時間 * 數據域位數
以位數最少的CANFD報文為例,在仲裁域波特率為1Mbps(位時間1us),數據域波特率為5Mbps(位時間200ns)時,其報文時間 = 1us *
26 + 33 * 200ns = 32.6us。
那么一秒鐘最多可以發送報文呢?由于報文發送成功后,需經過幀間隔(3個位)后才能發送下一幀報文,也就說仲裁段要在原來基礎上加3個位,就可以算出每秒發送多少幀了。那么上述位數最少報文的發送時間耗時
= 1us * (26 + 3) + 33 * 200ns = 35.6us,也就是1秒鐘最多可以發送1000000us / 35.6us =
28089幀報文。也就是說,1M/5M波特率下,發送CAN FD標準加速幀,最多可以發送28089幀。
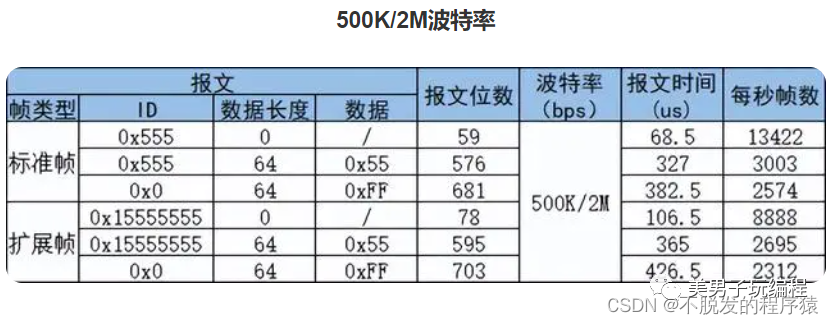
下面我們給出一些常用波特率下,不同類型報文每秒最多可以發送的CANFD報文幀數(下表中報文BRS位為1,ESI位為0),供大家參考。


聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
汽車電子
+關注
關注
3036文章
8266瀏覽量
169667 -
CAN
+關注
關注
57文章
2895瀏覽量
466907 -
報文
+關注
關注
0文章
39瀏覽量
4164
發布評論請先 登錄
相關推薦
熱點推薦
如何實現CAN到CAN FD的升級?
自動駕駛技術迅速發展,車輛中的CAN總線已經無法滿足數據吞吐量和傳輸速度的要求,CAN總線的加速升級版——CAN FD技術正在逐漸替代現有網絡。為了進一步了解
CAN FD協議介紹
、CAN-FD特性(1)兼容經典CAN,可以遵循ISO 11898-1做數據收發。(2)提升錯誤檢測,支持高達CRC 21位的校驗和。(3)消息優先級。(4)保證延遲時間。(5)配置靈活性。(6)具有
發表于 08-20 06:51
一文淺析汽車CAN-FD總線的通信應用
)傳輸速率更快FD全稱是 Flexible Data-Rate,顧名思義,表示CAN-FD 的幀報文具有數據場波特率可變的特性,即仲裁場合數據控制場使用標準的通信波特率,而到數據場就會切換為更高的通信
發表于 02-14 14:22
TJA1145ATK配置完成喚醒ID后,發現任意CAN FD報文將足夠其喚醒是怎么回事?
TJA1145ATK/FD,配置好喚醒ID后,發現去除了配置的喚醒ID可以將設備喚醒,任意的CAN FD報文也能足夠將其喚醒 寄存器配置如下:0x26寄存器配置為0x05,波特率為50
發表于 03-21 06:47
CAN總線協議教程|CAN報文分析
CAN協議教程 介紹:CAN總線 CAN總線是廣播類型的總線。這意味著所有節點都可以偵聽到所有傳輸的報文。無法將報文單獨發送給指定節點;所有
發表于 04-03 15:32
?1.5w次閱讀
CAN與CAN FD如何解決彼此的通訊
因為受制于產品的穩定性考驗,改造成本等問題,沒法快速全面普及CAN FD。另外,在2012年底提出CAN FD到2015年中成為ISO CAN
發表于 10-18 14:20
?3520次閱讀
可以混合使用Classical CAN格式和CAN FD格式的診斷報文嗎?
Unexpected N_PDU的處理只適用于相同N_AI的診斷報文。Classical CAN和CAN FD的N_AI本就不同,所以,互不干擾,可以并行處理;單個Message中不要
發表于 12-05 10:06
?1624次閱讀
CAN FD是什么意思 優點有哪些
日益增加的需求。 什么是CAN FD? CAN FD協議是由Bosch以及行業專家預研開發的,并于2012年發布。通過標準化對其進行了改進,現已納入ISO 11898-1:2015。一
經典CAN網絡加入CAN FD節點需要注意什么?
目前,整車的網絡拓撲中,CAN FD的使用已經非常普遍。當然,帶來的問題也非常的多。CAN FD在設計之初,就考慮了向后兼容Classic CAN
汽車CAN FD總線測試原理及應用
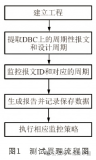
CAN FD總線報文周期一致性測試方法,可自動實現監控測試并快速生成測試報告,主要根據CAPL語言設計建立測試應用工程。
發表于 04-01 12:53
?1432次閱讀
CAN報文為什么會發送失敗?
CAN總線調試過程中出現報文發送失敗。很多工程師都對此只知其一不知其二,今天我們就以CAN報文發送失敗的問題來做一次探討。在了解CAN






 工商網監
工商網監
評論