 CCP協議原理和實現原理
CCP協議原理和實現原理

CCP協議原理
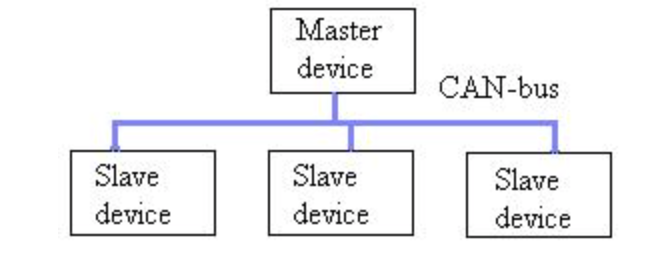
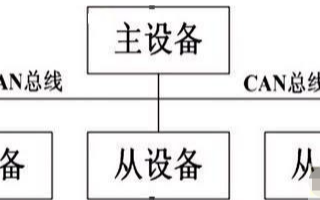
CCP是一種主從模式的協議,CCP主節點(例如我們的電腦PC)通過向從節點發送命令來開始通信。一條CAN總線上可以連接多個從節點。CCP使用通用的命令進行數據采集,并使用簡單的內存處理機制進行數據校準。注意數據采集和數據校準這兩種資源相互獨立,因此可以同時使用。也就是說PC是向 ECU 發送命令的主機。沒有主控(工具)啟動命令,ECU 不會發送信息。符合 CCP 標準的工具可以從 ECU 讀取數據,并可以使用適當的 CCP 消息將數據寫入 ECU。
CCP的實現原理
CCP驅動程序通過兩個標定報文實現,其報文可以設置較大,使其優先級較低,從而不干擾其他正常功能報文的通信。上文提到到通用命令介紹如下:
通用命令
CCP使用非節點特定的通用命令在從屬節點中執行不同的功能。由于命令是通用的,因此每個節點都必須有一個單獨的地址,我們通過這個地址來在發送命令之前建立邏輯連接。這種連接一直持續到主節點決定連接到另一個從節點或者直到主節點發送斷開命令為止。一旦邏輯連接建立后,master控制 master 和 slave 之間的所有通信。來自主站的每條消息后面都有來自從站的包含數據或錯誤代碼的回復消息。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
汽車電子
+關注
關注
3037文章
8347瀏覽量
170156 -
ecu
+關注
關注
14文章
934瀏覽量
55821
發布評論請先 登錄
相關推薦
熱點推薦
關于CCP協議的CAN通信問題
CCP協議里主機與ECU之間進行通信(一問一答模式)時,為什么主設備發給ECU的CRO指令的命令序號與從設備返回給主機的DTO命令序號不一樣?返回的數據場第一個字節是0xff,第2個字節是0,都沒有問題,就是第三個字節表示命令序號的與CRO命令的不一樣,理論上應該是建立了
發表于 11-30 13:16
關于CCP協議的CAN通信
最近利用周立功的USBCAN卡研究CCP協議的CAN通信,想實現ECU的DAQ模式,向ECU發送的幀依次為:CONNECT(建立連接)——>EXCHANGE_ID(交換ID)——>
發表于 12-02 15:31
汽車ECU標定系統CCP 軟件的實現
摘要:CCP 協議是一種CAN 總線標定匹配協議。本文簡單介紹該協議的基本原理,以及一種基于該協議的汽車ECU 標定系統的
發表于 05-16 20:10
?47次下載
基于CCP協議的混合動力車VCU標定系統開發
CCP 協議(CAN Calibration Protocol)可實現可靠,準確和快速的動態標定。本文在簡要介紹CCP 協議的原理,標定系統
發表于 07-09 09:58
?58次下載
基于CCP協議的汽車ECU標定系統的設計
CCP協議是一種基于CAN總線的匹配標定協議。 本文介紹了該協議的基本原理,通信方式以及用于ECU標定的各種工作模式,并討論了一種基于CCP
發表于 07-13 17:39
?60次下載
基于CCP的汽車控制器的匹配標定的設計
CCP是一種基于CAN總線的ECU標定協議,已經在許多歐美汽車廠商得到應用,采用CCP協議可以快速有效地實現對汽車電控單元的標定。
發表于 09-07 17:09
?6616次閱讀
基于CCP協議實現汽車電子控制單元標定系統的設計
隨著汽車電子技術的發展,電子控制單元(ECU)的標定已成為汽車電子控制裝置開發的一個重要環節。大多數ECU都需要經過匹配標定的過程,從而確定其運行參數和控制參數。目前國內還沒有成熟的基于CCP
發表于 04-26 10:04
?1992次閱讀

基于CCP協議實現汽車發動機標定系統的應用方案
CCP協議定義了兩種工作模式:一種是Polling(查詢)模式,另一種是DAQ(數據采集)模式。在本文所設計的標定系統中,根據實際需求情況,采用了DAQ模式。
基于MC9S12DP256芯片和μC/OS-II實現CCP軟件的設計
CCP 協議是一種CAN 總線標定匹配協議。本文簡單介紹該協議的基本原理,以及一種基于該協議的汽車ECU 標定系統的

基于CCP協議的電池管理標定系統研究
本文借鑒了汽車發動機電控系統標定方法,提出了一一種 基于CCP協議的電池管理系統的標定方案。該方案主要由電池管理系統、USB-CAN通信模塊及主控PC機的標定平臺軟件組成,并采用國際通用的CCP作為電池管理系統和PC機的標定
發表于 04-02 17:30
?3次下載
基于CCP協議利用CANape進行電控單元標定設計
采用基于CAN總線的匹配標定協議,對汽車控制器局域網絡中的電子控制單元進行匹配標定。分析了CCP協議用于標定的工作機理,討論了利用CANape進行基于CCP標定的
發表于 04-06 16:18
?3次下載
什么是調參 CCP協議的實現原理
調參就是優化或調整控制算法中的某些參數以獲得系統最佳效果的過程。我們通過校準工具(比如網絡接口卡can盒子和canape)訪問 ECU 中的校準變量并進行更改,注意我們要校準的那些參數都被分組到 ECU 內存的一個特殊部分,稱為校準內存。我們通過校準工具來訪問這塊內存。
發表于 06-21 09:12
?1155次閱讀

TSMaster—CCP/XCP標定功能詳解
眾所周知,CCP是CANCalibrationProtocolCAN標定協議的縮寫,XCP是UniversalMeasurementandCalibrationProtocol通用測量與標定協議






 工商網監
工商網監
評論