") 編碼器是什么?編碼器有哪些分類?
編碼器是什么?編碼器有哪些分類?
編碼器是什么:
一種將角位移或者角速度轉(zhuǎn)換成一連串電數(shù)字脈沖的旋轉(zhuǎn)式傳感器,我們可以通過編碼器測量到位移或者速度信息。編碼器通常由一個旋轉(zhuǎn)部分和一個固定部分組成,旋轉(zhuǎn)部分隨著被測量的物體進(jìn)行旋轉(zhuǎn),固定部分則保持不動。當(dāng)旋轉(zhuǎn)部分發(fā)生旋轉(zhuǎn)時,編碼器會產(chǎn)生一系列的電數(shù)字脈沖信號,這些脈沖信號可以用來確定旋轉(zhuǎn)角度或角速度。
編碼器輸出類型分類:
編碼器從輸出數(shù)據(jù)類型上分,可以分為增量式編碼器和絕對式編碼器。
絕對編碼器(Absolute Encoder):
絕對編碼器可以直接讀取物體的絕對位置或角度,無需進(jìn)行初始參考點(diǎn)的校準(zhǔn)。絕對編碼器通常具有高精度和準(zhǔn)確性,適用于需要精確位置或角度信息的應(yīng)用。
增量編碼器(Incremental Encoder):
增量編碼器測量的是物體相對于初始位置的增量角度或角速度。它們通常需要一個初始位置的參考點(diǎn),因此在啟動時需要進(jìn)行校準(zhǔn)。增量編碼器適用于需要監(jiān)測運(yùn)動變化的應(yīng)用,但相對于絕對編碼器可能需要更多的處理來確定絕對位置
編碼器檢查原理分類:
從編碼器檢測原理上來分,還可以分為光學(xué)式、磁式、感應(yīng)式、電容式。常見的是光電編碼器(光學(xué)式)和霍爾編碼器(磁式)。
光學(xué)編碼器(Optical Encoder):
光學(xué)編碼器利用光學(xué)原理來測量旋轉(zhuǎn)角度或線性位移。它包含一個光源(通常是發(fā)光二極管)和一個光敏元件(通常是光電二極管或光電傳感器)。旋轉(zhuǎn)部分上的編碼盤或編碼條上有一個特定的光學(xué)圖案,當(dāng)旋轉(zhuǎn)發(fā)生時,光源會照射到光敏元件上,根據(jù)光敏元件接收到的光信號變化,可以測量出旋轉(zhuǎn)角度或線性位移。
磁性編碼器(Magnetic Encoder):
磁性編碼器使用磁場來測量旋轉(zhuǎn)角度或線性位移。它包括一個磁性編碼盤或編碼條,以及一個或多個磁敏傳感器。編碼盤上的磁性圖案與傳感器之間的磁場變化會導(dǎo)致輸出信號的變化,從而測量出旋轉(zhuǎn)角度或線性位移。
編碼器的用途:
編碼器在工業(yè)自動化、機(jī)器人控制、醫(yī)療設(shè)備、航空航天等領(lǐng)域都有廣泛的應(yīng)用,用于測量和控制旋轉(zhuǎn)運(yùn)動。它們的輸出信號可以通過電子設(shè)備進(jìn)行解碼,從而得到準(zhǔn)確的角度或角速度信息。
編碼器檢測原理:
光電編碼器(Optoelectronic Encoder)是一種常見的增量式編碼器,利用光學(xué)原理來測量旋轉(zhuǎn)角度或線性位移。
它是一種通過光電轉(zhuǎn)換將輸出軸上的機(jī)械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的傳感器。光電編碼器是由光碼盤和光電檢測裝置組成。光碼盤是在一 定直徑的圓板上等分地開通若干個長方形孔。由于光電碼盤與電動機(jī)同軸,電動機(jī)旋轉(zhuǎn)時,檢測裝置檢測輸出若干脈沖信號,為判斷轉(zhuǎn)向,一般輸出兩組存在一 定相位差的方波信號
它主要是根據(jù)光是否被遮擋來輸出不同的信號檢測物體運(yùn)動的變化。
下面是光電編碼器的檢測原理:
- 編碼盤或編碼條:光電編碼器的旋轉(zhuǎn)部分上通常有一個編碼盤或編碼條,上面有特定的光學(xué)圖案,如透明間隔和不透明條紋。這些圖案會在旋轉(zhuǎn)過程中使光線與光敏元件之間產(chǎn)生周期性的遮擋和透射,從而生成脈沖信號。
- 光源:光電編碼器中的光源通常是發(fā)光二極管(LED),發(fā)射的光線照射到編碼盤或編碼條上的光學(xué)圖案上。
- 光敏元件:光電編碼器中的光敏元件通常是光電二極管或光電傳感器。它們安裝在固定位置,用于接收從編碼盤或編碼條反射回來的光線。當(dāng)光線經(jīng)過透明間隔或被不透明條紋遮擋時,光敏元件會產(chǎn)生電信號變化。
- 信號處理:光敏元件產(chǎn)生的電信號被放大和處理,通常經(jīng)過電子電路進(jìn)行脈沖計數(shù)。在旋轉(zhuǎn)過程中,光敏元件會在透明間隔和不透明條紋之間切換,從而產(chǎn)生一系列脈沖信號。這些脈沖信號的數(shù)量和頻率與旋轉(zhuǎn)角度或線性位移成正比。
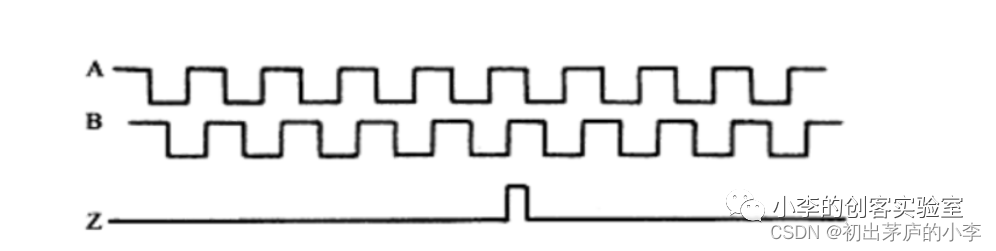
- 脈沖輸出:光電編碼器通過脈沖信號輸出來表示旋轉(zhuǎn)角度或線性位移的變化。通常,有兩路正交的脈沖信號(通常稱為A相和B相),用于測量方向和增量變化。此外,一些光電編碼器還可能具有Z相信號,用于標(biāo)記一個完整的旋轉(zhuǎn)周期。
霍爾編碼器是一種通過磁電轉(zhuǎn)換將輸出軸上的機(jī)械幾何位移量轉(zhuǎn)換成脈沖或數(shù)字量的傳感器。霍爾編碼器是由霍爾碼盤和霍爾元件組成。霍爾碼盤是在一 定直徑的圓板上等分地布置有不同的磁極。霍爾碼盤與電動機(jī)同軸,電動機(jī)旋轉(zhuǎn)時,霍爾元件檢測輸出若干脈沖信號,為判斷轉(zhuǎn)向,一般輸出兩組存在一定相位差的方波信號
它主要是利用外部磁場對半導(dǎo)體材料中電子運(yùn)動軌跡的影響來檢測位置變化。
下面是霍爾編碼器的工作原理:
- 霍爾效應(yīng) :霍爾效應(yīng)是一種基本的物理現(xiàn)象,當(dāng)電流通過具有霍爾電阻率的半導(dǎo)體材料時,受外部磁場影響,材料的一側(cè)會產(chǎn)生電勢差,這個電勢差稱為霍爾電壓。霍爾電壓的大小和方向與外部磁場的強(qiáng)度和方向有關(guān)。
- 霍爾元件 :霍爾編碼器中的霍爾元件是基于霍爾效應(yīng)工作的傳感器。它通常是一個薄片狀的半導(dǎo)體材料,具有兩個側(cè)面連接的電極。當(dāng)電流通過霍爾元件時,外部磁場的作用會導(dǎo)致在材料的一側(cè)產(chǎn)生霍爾電壓,從而形成一個電勢差。
- 霍爾碼盤 :霍爾碼盤是一個磁性的圓盤或條狀物,上面布置有不同的磁極。這些磁極的分布呈現(xiàn)一定的規(guī)律,可以是正交編碼、格雷碼等。當(dāng)霍爾碼盤隨著機(jī)械運(yùn)動旋轉(zhuǎn)時,磁極的變化會引起周圍磁場的變化。
- 工作過程 :當(dāng)霍爾碼盤旋轉(zhuǎn)時,產(chǎn)生的磁場變化會影響附近的霍爾元件。這將導(dǎo)致霍爾元件產(chǎn)生電勢差,從而產(chǎn)生霍爾電壓。根據(jù)霍爾電壓的變化,可以判斷旋轉(zhuǎn)角度或線性位移的變化。
- 信號處理 :霍爾元件產(chǎn)生的霍爾電壓會被放大和處理,通常使用電子電路將其轉(zhuǎn)換為脈沖信號或數(shù)字量。這些脈沖信號可以用于測量位置的變化和方向。
EC11編碼器:
EC11編碼器是一種常見的增量式旋轉(zhuǎn)編碼器,廣泛應(yīng)用于各種電子設(shè)備和產(chǎn)品中,例如旋鈕、開關(guān)、控制器等。它通常用于檢測和測量旋轉(zhuǎn)角度變化,以及提供用戶界面控制。
以下是EC11編碼器的工作原理:
- 機(jī)械結(jié)構(gòu) :EC11編碼器通常由一個中心旋鈕、編碼盤和內(nèi)置的旋轉(zhuǎn)傳感器(通常是霍爾元件)組成。編碼盤上通常有一系列的磁極或光學(xué)標(biāo)記,這些標(biāo)記隨著旋鈕的旋轉(zhuǎn)而變化。
- 正交脈沖輸出 :當(dāng)用戶旋轉(zhuǎn)EC11編碼器的旋鈕時,編碼盤上的磁極或標(biāo)記會在旋轉(zhuǎn)傳感器附近引發(fā)磁場或光信號的變化。旋轉(zhuǎn)傳感器會感知這些變化,并生成兩組相位差90度的正交脈沖信號,通常稱為A相和B相。這些脈沖信號的變化頻率與旋鈕的旋轉(zhuǎn)速度成正比,而脈沖的相位關(guān)系則可以用于確定旋轉(zhuǎn)方向(順時針或逆時針)。
- 脈沖計數(shù)和處理 :EC11編碼器的輸出脈沖信號通常被輸入到微控制器、編碼器接口電路或其他數(shù)字電子設(shè)備中。這些設(shè)備會對脈沖信號進(jìn)行計數(shù)和處理,以測量旋轉(zhuǎn)角度的變化。通過計數(shù)脈沖的數(shù)量,可以確定旋轉(zhuǎn)的步數(shù),從而獲得旋轉(zhuǎn)角度的信息。同時,根據(jù)A相和B相脈沖信號的相位差,可以判斷旋轉(zhuǎn)的方向。
- 按壓功能 :許多EC11編碼器還具有中心按壓按鈕功能。當(dāng)用戶按下旋鈕時,內(nèi)置的開關(guān)會觸發(fā),產(chǎn)生一個用于觸發(fā)操作的信號,如確認(rèn)或選擇。
編碼器的信號輸出:
編碼器的信號通常由兩組脈沖信號(A相和B相)組成,用于測量旋轉(zhuǎn)角度或線性位移的變化。這些信號是編碼器工作原理的核心部分,用于產(chǎn)生計數(shù)和判斷旋轉(zhuǎn)方向。
以下是關(guān)于編碼器信號的一些重要信息:
- A相和B相脈沖信號 :編碼器通常輸出兩組相位差90度的脈沖信號,稱為A相和B相。這些信號是正交的,意味著它們的變化情況可以用于判斷旋轉(zhuǎn)的方向(順時針或逆時針)。
- Z相信號 :一些編碼器還可能輸出一個Z相信號,也稱為索引信號。Z相信號在一個完整的旋轉(zhuǎn)周期內(nèi)只產(chǎn)生一個脈沖,用于標(biāo)記一個旋轉(zhuǎn)周期的起始點(diǎn)。當(dāng)編碼器旋轉(zhuǎn)到零點(diǎn)時,Z信號會發(fā)出一個脈沖表示現(xiàn)在是零位置 表示編碼器轉(zhuǎn)了1圈,可用來記錄編碼器轉(zhuǎn)了多少圈
 3. 脈沖數(shù)量 :脈沖信號的數(shù)量與旋轉(zhuǎn)角度或位移的變化成正比。通過計數(shù)這些脈沖,可以確定物體的旋轉(zhuǎn)角度或線性位移的變化。
3. 脈沖數(shù)量 :脈沖信號的數(shù)量與旋轉(zhuǎn)角度或位移的變化成正比。通過計數(shù)這些脈沖,可以確定物體的旋轉(zhuǎn)角度或線性位移的變化。
如果一個編碼器是500線,說明這個編碼器轉(zhuǎn)一圈對應(yīng)的信號線會輸出500個脈沖
- 脈沖周期 :脈沖信號的周期取決于編碼器的分辨率。分辨率越高,每度或每單位位移產(chǎn)生的脈沖就越多,從而提供更精確的測量。
- 脈沖寬度 :脈沖信號的寬度通常是固定的,但也可以在某些編碼器中進(jìn)行調(diào)整。脈沖寬度影響到信號的頻率和精度。
編碼器的信號可以通過適當(dāng)?shù)碾娮与娐愤M(jìn)行捕獲和處理,以獲取旋轉(zhuǎn)角度或位移的信息。在微控制器或其他數(shù)字系統(tǒng)中,這些信號可以進(jìn)一步用于計數(shù)、方向判斷和實(shí)際的應(yīng)用控制。
編碼器正反旋轉(zhuǎn)輸出信號:

波形特點(diǎn)總結(jié):
正轉(zhuǎn)的時候信號線A先輸出信號,信號線B后輸出 A相超前B相90度 證明是正轉(zhuǎn)****反轉(zhuǎn)的時候信號線B先輸出信號,信號線A后輸出 B相超前A相90度 證明是反轉(zhuǎn)
STM32的編碼器工作模式:
STM32的定時器編碼器模式包括三種。這三種編碼器模式是:
- 僅在TI1計數(shù)(A相) :在這種模式下,定時器僅根據(jù)A相信號(TI1輸入通道)進(jìn)行計數(shù),B相信號(TI2輸入通道)不會被計數(shù)。
- 僅在TI2計數(shù)(B相) :在這種模式下,定時器僅根據(jù)B相信號(TI2輸入通道)進(jìn)行計數(shù),A相信號(TI1輸入通道)不會被計數(shù)。
- 在TI1和TI2都計數(shù)(A相和B相都計數(shù)) :這種模式下,定時器會同時根據(jù)A相和B相信號(TI1和TI2輸入通道)進(jìn)行計數(shù),通過相位差來判斷旋轉(zhuǎn)方向。
僅在TL1計數(shù)(A相)特點(diǎn):
當(dāng)TI2(B相)為高電平時:
1時刻:TI1(A相)下降沿, 則向上計數(shù)(正轉(zhuǎn))。
2時刻:TI1(A相)上升沿, 則向下計數(shù)(反轉(zhuǎn))
當(dāng)TI2(B相)為低電平時:
3時刻:TI1(A相)上升沿, 則向上計數(shù)(正轉(zhuǎn))。
4時刻:TI1(A相)下降沿, 則向下計數(shù)(反轉(zhuǎn)) 波形圖:
僅在TL2計數(shù)(B相)特點(diǎn)
當(dāng)TI1(A相)為高電平時:
1時刻:TI2(B相)上升沿, 則向上計數(shù)(正轉(zhuǎn))。
2時刻:TI2(B相)下降沿, 則向下計數(shù)(反轉(zhuǎn))
當(dāng)TI2(B相)為低電平時:
3時刻:TI2(B相)下降沿, 則向上計數(shù)(正轉(zhuǎn))。
4時刻:TI2(B相)上升沿, 則向下計數(shù)(反轉(zhuǎn)) 波形圖: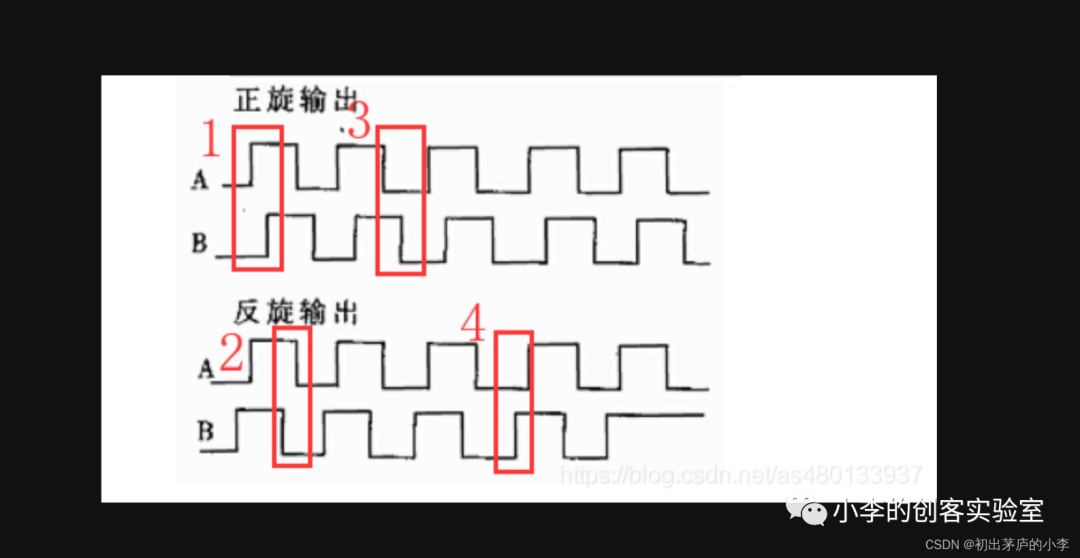
在TL1和TL2都計數(shù)(A相和B相都計數(shù))特點(diǎn)一個脈沖信號周期完成4次跳變。精度提高
1時刻:TI2為低電平,TI1上升沿跳變,計數(shù)器向上計數(shù);
2時刻:TI1為高電平,TI2上升沿跳變,計數(shù)器仍然向上計數(shù);
3時刻:TI2為高電平,TI1下降沿跳變,計數(shù)器仍然向上計數(shù);
4時刻:TI1為低電平,TI2下降沿跳變,計數(shù)器仍然向上計數(shù)。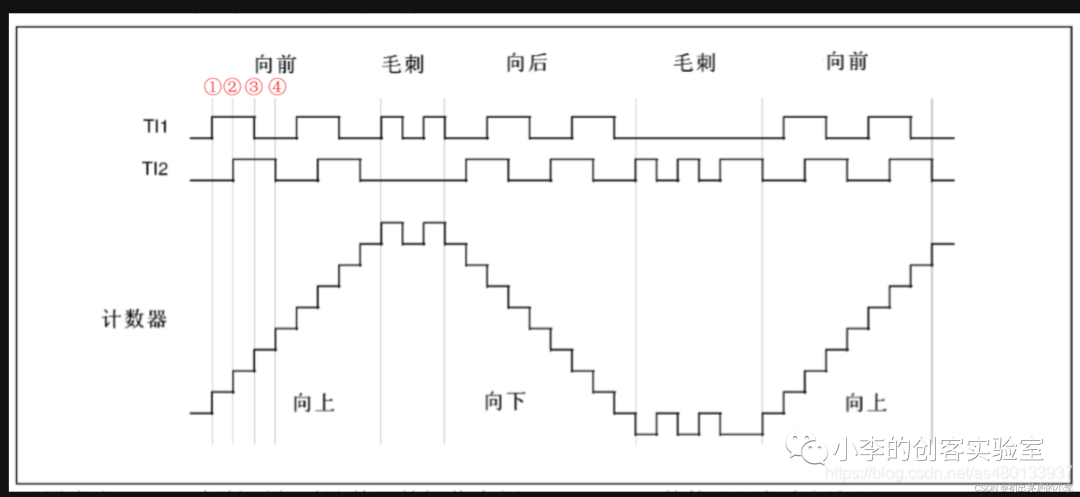
三種工作模式如何選擇:
需要增加測量的精度時,可以采用4倍頻方式,即分別在A、B相波形的上升沿和下降沿計數(shù),分辨率可以提高4倍,如果只是測速,不要求方向,那么只需要用單片機(jī)隨意選擇一個信號線就行了,然后定時器邊沿觸發(fā),檢測脈沖計數(shù)即可 一般是定時器的通道1和2才能作為編碼器輸入口,對應(yīng)編碼器輸出的兩相。GPIO配置為配置為上拉輸入模式一個定時器做一種工作,如果你配置了編碼器模式,那么剩下的通道就不能配置其他模式兩相計數(shù)模式下, 讀出來數(shù)需要/4
STM32的編碼器接口介紹:
| 定時器 | A相引腳 | B相引腳 | 編碼器模式 |
|---|---|---|---|
| TIM1 | PA8 | PA9 | TI12 |
| TIM2 | PA0 | PA1 | TI12 |
| TIM3 | PA6 | PA7 | TI12 |
| TIM4 | PB6 | PB7 | TI12 |
| TIM5 | PA0 | PA1 | TI12 |
| TIM8 | PC6 | PC7 | TI12 |
總結(jié):
EC11是一種增量式編碼器,其實(shí)生活中鼠標(biāo)的中間的滾輪,汽車用CD上調(diào)整頻率和音量的旋鈕,用的都是編碼器 ,了解了編碼器是怎樣工作之后,下期寫一遍文章詳細(xì)講講如何用STM32的定時器來識別編碼器的旋轉(zhuǎn)方向跟計數(shù)值。
-
傳感器
+關(guān)注
關(guān)注
2564文章
52700瀏覽量
764563 -
編碼器
+關(guān)注
關(guān)注
45文章
3782瀏覽量
137395 -
STM32
+關(guān)注
關(guān)注
2290文章
11018瀏覽量
362906 -
定時器
+關(guān)注
關(guān)注
23文章
3290瀏覽量
117423 -
信號輸出
+關(guān)注
關(guān)注
0文章
44瀏覽量
8675
發(fā)布評論請先 登錄
什么是編碼器 什么叫編碼器 編碼器什么意思
光電編碼器,光電編碼器是什么意思

編碼器是什么?其主要分類有哪些?
編碼器種類及型號

編碼器是什么?編碼器有哪些分類及應(yīng)用

伺服電機(jī)編碼器分類






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論