") 全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(五):IO配置與回零運(yùn)動(dòng)的Python+Qt開發(fā)
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(五):IO配置與回零運(yùn)動(dòng)的Python+Qt開發(fā)
今天,正運(yùn)動(dòng)小助手給大家分享一下全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H如何使用Python+QT實(shí)現(xiàn)單軸回零運(yùn)動(dòng)控制開發(fā)。
一、功能簡(jiǎn)介
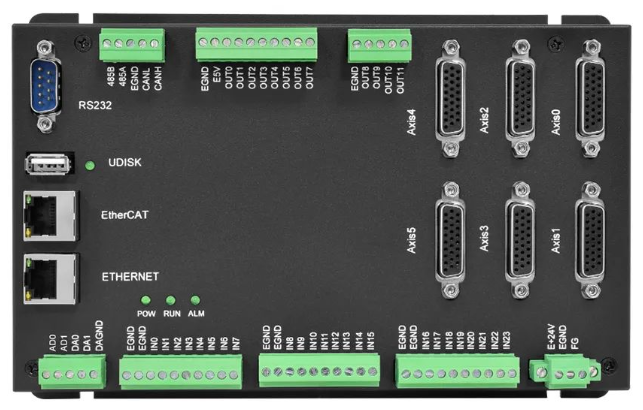
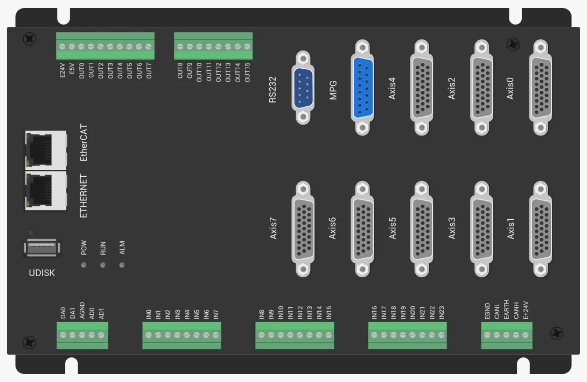
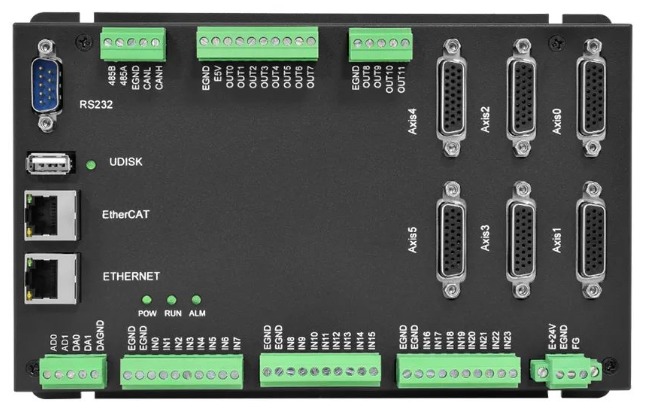
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H是正運(yùn)動(dòng)的一款軟硬件全國(guó)產(chǎn)自主可控,運(yùn)動(dòng)控制接口兼容EtherCAT總線和脈沖型的獨(dú)立式運(yùn)動(dòng)控制器,最多支持32軸運(yùn)動(dòng)控制,同時(shí)支持正運(yùn)動(dòng)遠(yuǎn)程HMI功能,能提供網(wǎng)絡(luò)組態(tài)顯示,可實(shí)時(shí)監(jiān)控和調(diào)整參數(shù)配置。
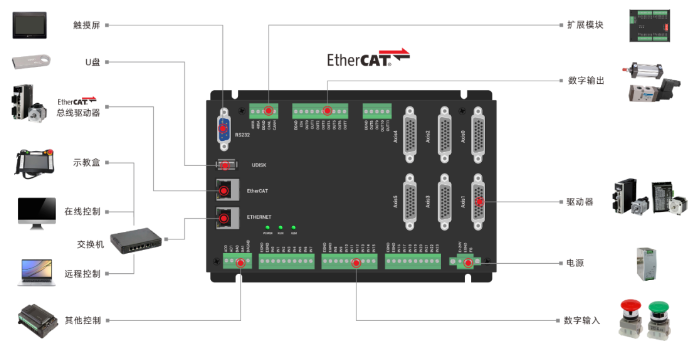
ZMC432H具備豐富的硬件接口和控制功能模塊,能實(shí)現(xiàn)高效穩(wěn)定的運(yùn)動(dòng)控制和實(shí)時(shí)數(shù)據(jù)采集,以滿足工業(yè)控制協(xié)同工業(yè)互聯(lián)網(wǎng)的應(yīng)用需求。ZMC432H內(nèi)置了Linux系統(tǒng),可以使用本地的LOCAL接口進(jìn)行連接,可以做到更快速的指令交互,單條指令與多條指令一次性交互時(shí)間為40us左右。
二、Python+QT進(jìn)行運(yùn)動(dòng)控制開發(fā)
(一)配置好python+Qt開發(fā)環(huán)境,以及安裝好所需工具
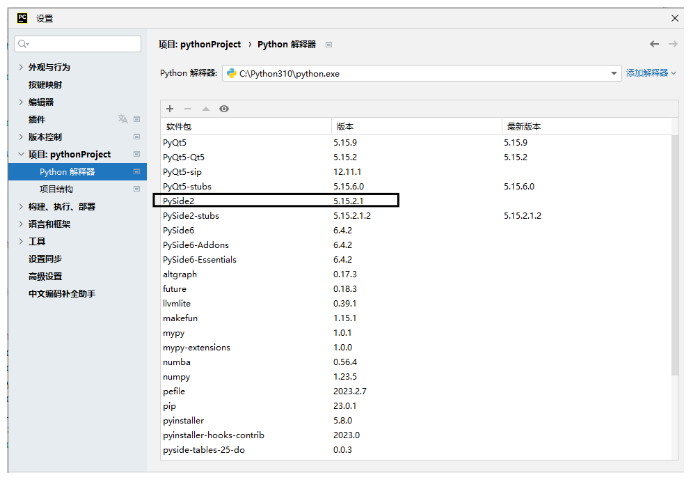
1、下載python解釋器。
2、安裝pyside2或者pyside6根據(jù)python解釋器的版本來選擇,高版本的解釋器使用pyside6。
安裝pyside2有以下兩種方式:
方式一:使用win+r打開運(yùn)行界面,然后輸入cmd(在安裝python解釋器的時(shí)候要根據(jù)安裝向?qū)渲煤铆h(huán)境變量,否則后面的指令不會(huì)執(zhí)行成功),pipinstall pyside2 -i https://pypi.douban.com/simple/;
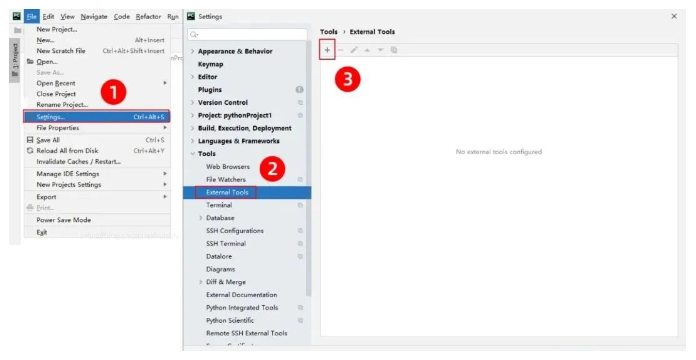
方式二:在pycharm中安裝。3、安裝好PyCharm Community Edition,在如下界面點(diǎn)擊+號(hào),安裝所需的工具,如pyside2。
4、在Pycharm中配置自定義工具(用于qt的界面編輯)。(1)按照如圖步驟打開Tool的編輯框。
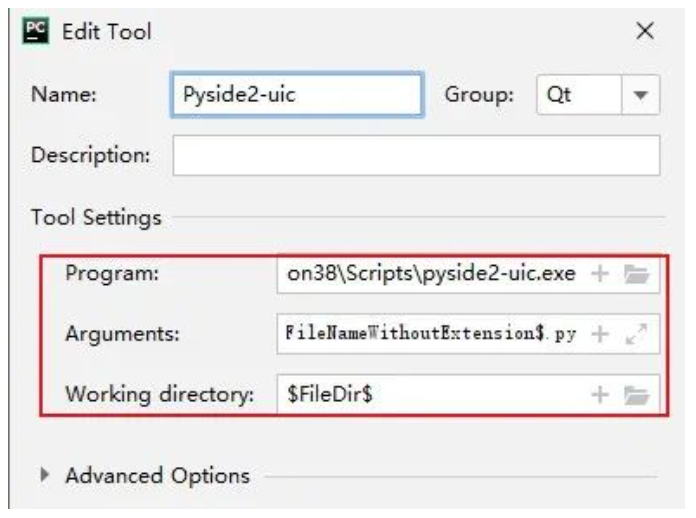
(2)自定義Pyside2-uic:
a.Program填寫:Python安裝目錄 Scriptspyside2-uic.exe;
b.Arguments填寫:$FileName$ -o $FileNameWithoutExtension$.py;
c.Working directory填寫:$FileDir$。
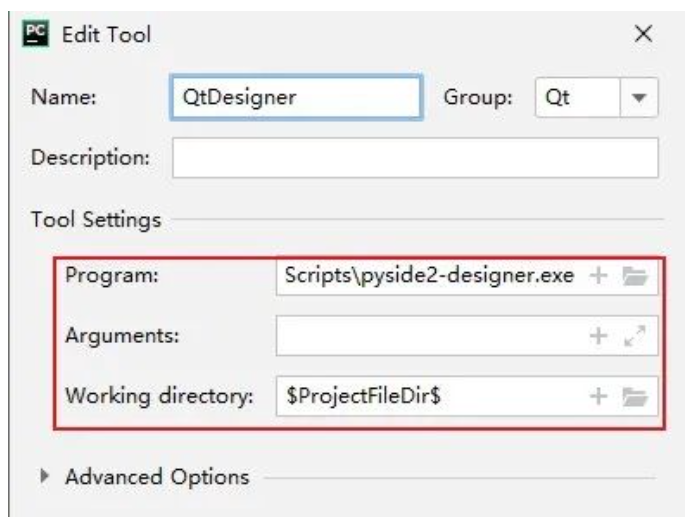
(3)自定義QtDesigner:
a.Program填寫:Python安裝目錄 Scriptspyside2-designer.exe;
b.Working directory填寫:$ProjectFileDir$。
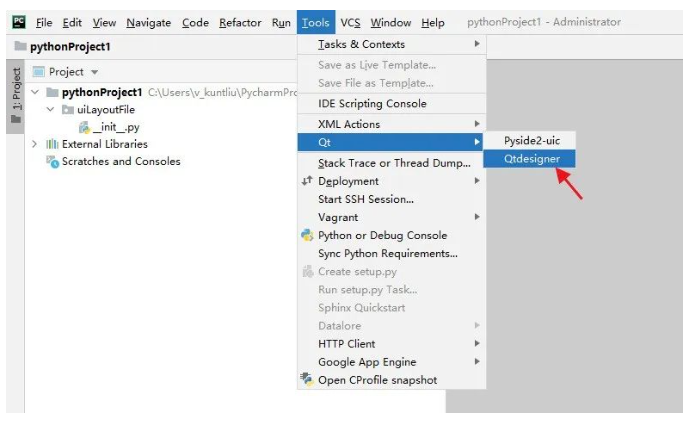
將自定義工具配置好之后就可以直接在PyCharm的菜單中直接使用了。
1、點(diǎn)擊Tools → Qt → Qtdesigner即可進(jìn)入U(xiǎn)I的設(shè)計(jì)界面。
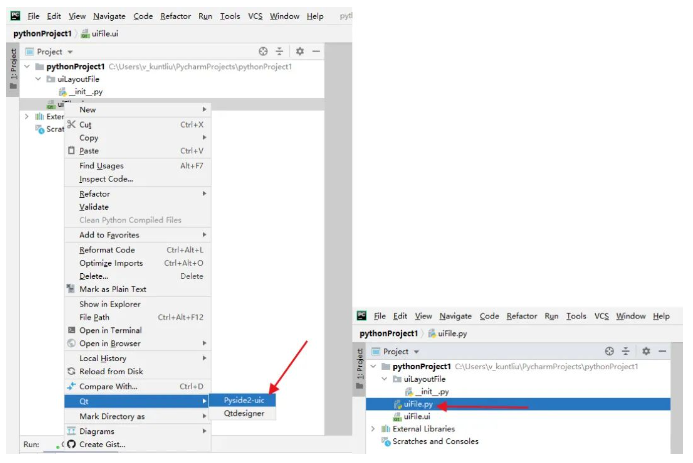
2、右鍵ui文件,點(diǎn)擊Qt → Pyside2-uic即可生成ui文件的py文件。
(二)新建Python項(xiàng)目并添加函數(shù)庫(kù)
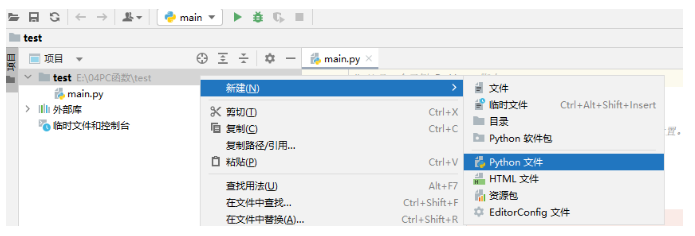
1、使用PyCharm Community Edition 2022打開一個(gè)新建的文件夾或者在進(jìn)入PyCharm Community Edition 2022之后新建一個(gè)目錄,并在目錄中添加Python文件。
2、找到找到廠家提供的光盤資料,路徑如下。
A.進(jìn)入廠商提供的光盤資料找到“04.PC函數(shù)”文件夾,并點(diǎn)擊進(jìn)入。

B.選擇“PC函數(shù)庫(kù)V2.1.1”文件夾。

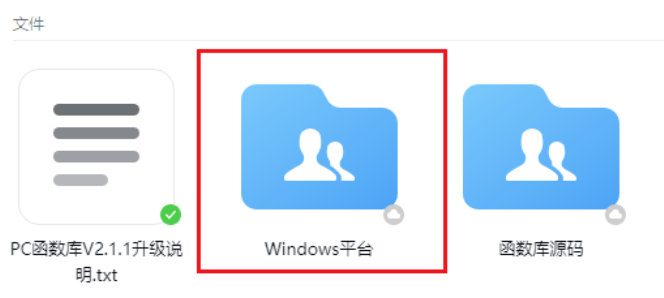
C.選擇“Windows平臺(tái)”文件夾。
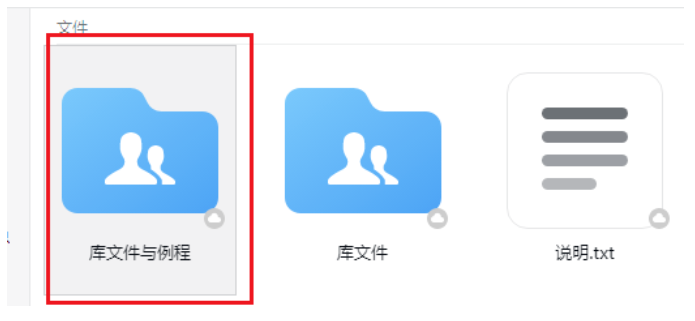
D.選擇“庫(kù)文件與例程”文件夾。
E.選擇“PYTHON例程”文件夾。
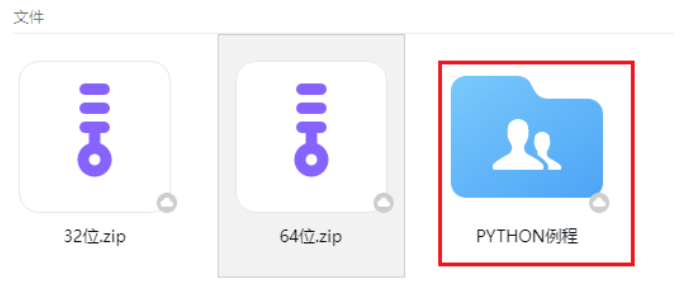
F.解壓對(duì)應(yīng)位數(shù)的壓縮包。

G.解壓后如下圖所示。
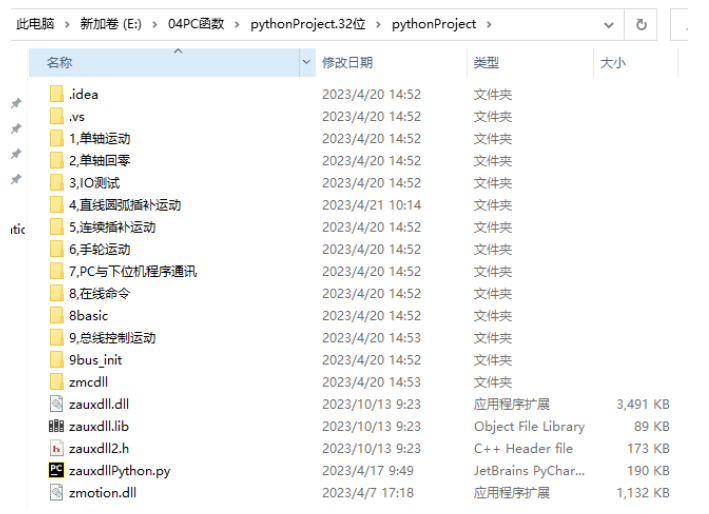
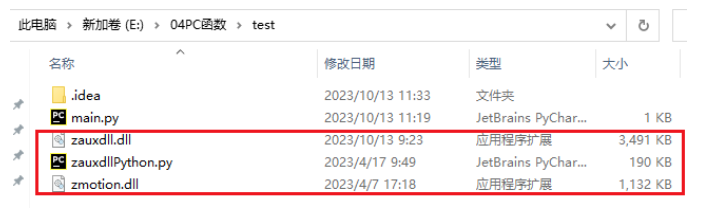
3、對(duì)于Windows系統(tǒng)來說將zauxdll.dll、zmotion.dll以及zauxdllPython.Py文件加入所創(chuàng)建的文件夾內(nèi)即可。
(三)查看PC函數(shù)手冊(cè),熟悉相關(guān)函數(shù)接口。
1、PC函數(shù)手冊(cè)也在光盤資料里面,具體路徑如下:“光盤資料?4.PC函數(shù)ZMotionPC函數(shù)庫(kù)編程手冊(cè)及其例程源碼ZMotionPC函數(shù)庫(kù)編程手冊(cè)V2.1.1.pdf”。

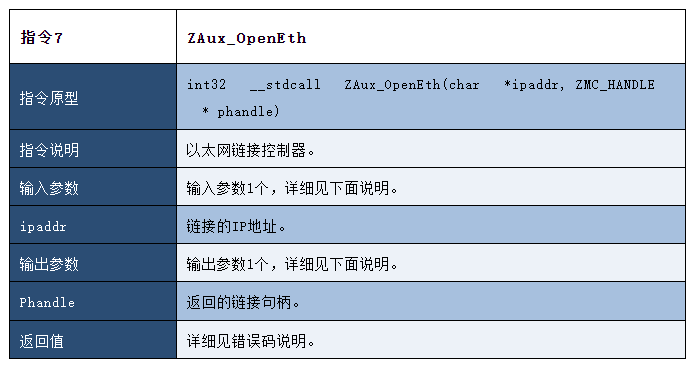
2、鏈接控制器,獲取鏈接句柄。
(1)ZAux_OpenEth()接口說明:
(2)配置IO信號(hào)點(diǎn)對(duì)應(yīng)函數(shù)接口說明:
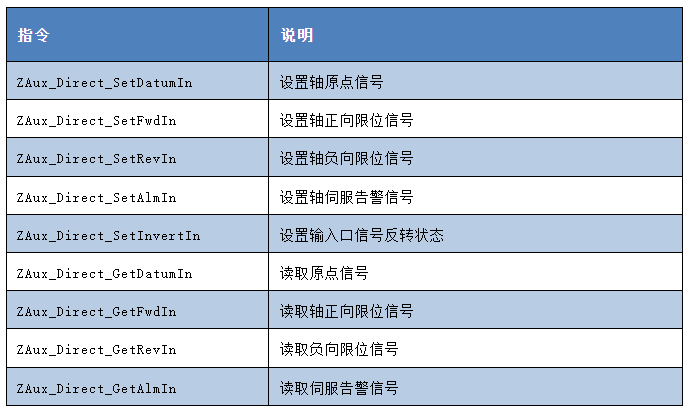
對(duì)接口的詳細(xì)說明可查看PC函數(shù)手冊(cè)。
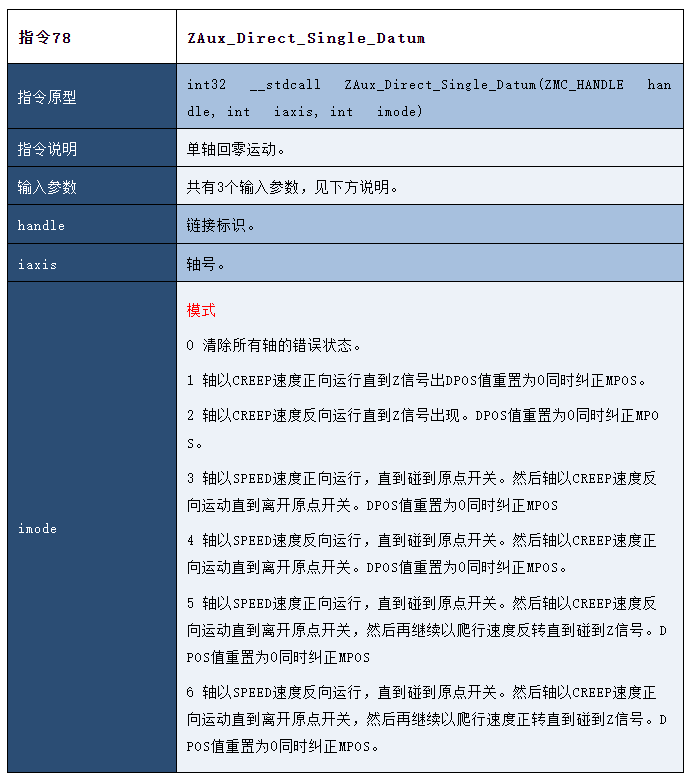
(3)以下為回零運(yùn)動(dòng)調(diào)用接口,以及對(duì)回零模式的詳細(xì)說明:
加10表示碰到限位后反找, 不會(huì)碰到限位停止,例如13=模式3+限位反找10,用于原點(diǎn)在正中間的情況。
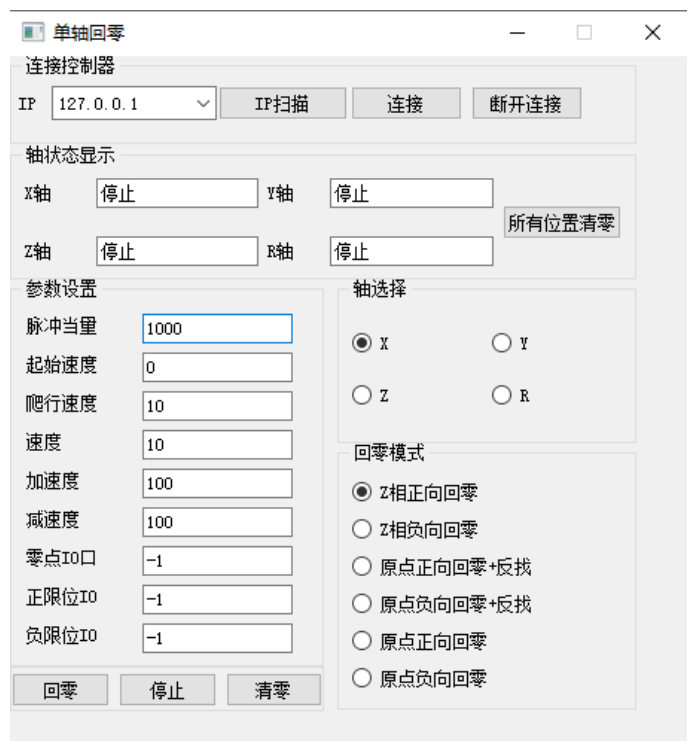
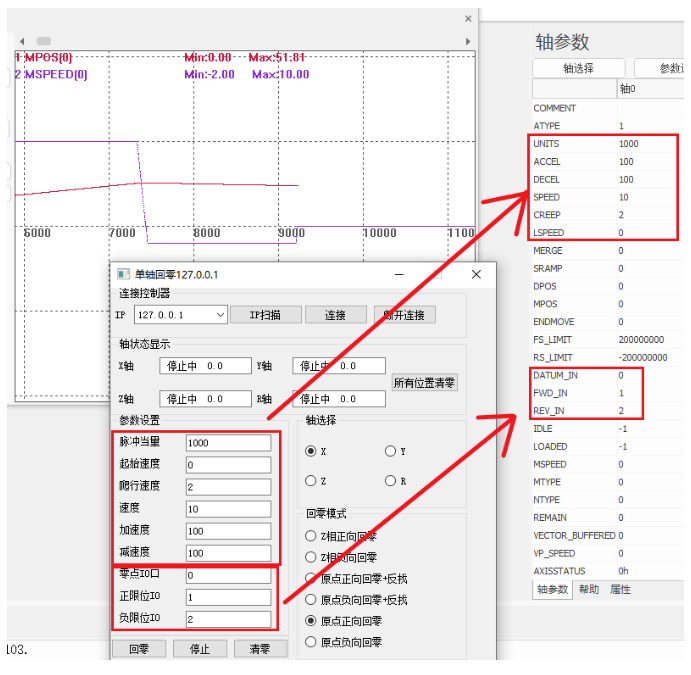
(四)Python+Qt開發(fā)控制器單軸回零例程。
1、例程界面如下。
2、程序示例如下。
(1)Python中加載qt的UI文件;
from PySide2.QtWidgets import QMessageBox from PySide2.QtCore import QFile, QTimer from PySide2.QtUiTools import QUiLoader q_state_file = QFile("mainweiget.ui") q_state_file.open(QFile.ReadOnly) self.ui = QUiLoader().load(q_state_file) q_state_file.close()
注:此時(shí)self.ui表示了qt中的ui。
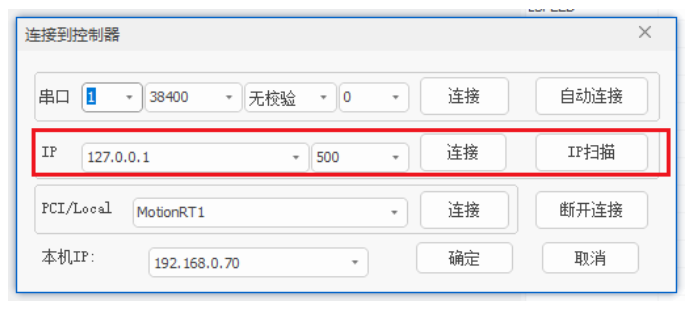
(2)鏈接按鈕的事件處理函數(shù)中調(diào)用鏈接控制器的接口函數(shù)ZAux_OpenEth(),與控制器進(jìn)行鏈接,鏈接成功后啟動(dòng)定時(shí)器1監(jiān)控控制器狀態(tài)。
def on_btn_open_clicked(self):
strtemp = self.ui.comboBox.currentText()
print("當(dāng)前的ip是 :", strtemp)
if self.Zmc.handle.value is not None:
self.Zmc.close()
self.time1.stop()
self.ui.setWindowTitle("單軸回零")
iresult = self.Zmc.open_eth(strtemp)
if 0 != iresult:
QMessageBox.warning(self.ui, "提示", "連接失敗")
else:
QMessageBox.warning(self.ui, "提示", "連接成功")
str_title = self.ui.windowTitle() + strtemp
self.ui.setWindowTitle(str_title)
self.Up_State()
self.time1.start(100)
(3)通過定時(shí)器監(jiān)控控制器狀態(tài)。
def Up_State(self):
idlelist = [ctypes.c_int(-1) for i in range(0, 4)]
fdposlist = [ctypes.c_float(0) for i in range(0, 4)]
for i in range(0, 4):
self.Zmc.get_target_pos(i, fdposlist[i]) # 獲取當(dāng)前軸位置
self.Zmc.get_idle(i, idlelist[i]) # 判斷當(dāng)前軸狀態(tài)
str1 = " {} {} ".format("停止中" if idlelist[0].value else "運(yùn)行中", round(fdposlist[0].value, 2))
self.ui.lineEdit_X.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[1].value else "運(yùn)行中", round(fdposlist[1].value, 2))
self.ui.lineEdit_Y.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[2].value else "運(yùn)行中", round(fdposlist[2].value, 2))
self.ui.lineEdit_Z.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[3].value else "運(yùn)行中", round(fdposlist[3].value, 2))
self.ui.lineEdit_R.setText(str1)
(4)使用回零按鈕的事件處理函數(shù)對(duì)回零運(yùn)動(dòng)前的參數(shù)進(jìn)行初始化以及調(diào)用對(duì)應(yīng)的回零模式操作回零運(yùn)動(dòng)。
def on_btn_run_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未連接控制器")
return
ifidle = ctypes.c_int(0)
self.Zmc.get_idle(self.axis_Num,ifidle)
if 0 == ifidle:
QMessageBox.warning(self.ui, "提示", "運(yùn)動(dòng)未停止")
return
# 設(shè)定軸類型 7 - 脈沖軸類型 + 編碼器Z信號(hào) 不用EZ回零也可以設(shè)置為1
self.Zmc.set_axis_type(self.axis_Num,7 if self.mode < 3 else 1)
# 設(shè)定脈沖模式及邏輯方向(脈沖 + 方向)
self.Zmc.set_invert_step(self.axis_Num,0)
# 設(shè)置當(dāng)量
str_tmp = self.ui.edit_Units.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(self.axis_Num,float_tmp)
# 設(shè)置爬行速度
str_tmp = self.ui.edit_CLSpeed.text()
float_tmp = float(str_tmp)
self.Zmc.set_creep(self.axis_Num,float_tmp)
# 設(shè)置速度
str_tmp = self.ui.edit_Speed.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(self.axis_Num,float_tmp)
# 設(shè)置加速度
str_tmp = self.ui.edit_Accel.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(self.axis_Num,float_tmp)
# 設(shè)置減速度
str_tmp = self.ui.edit_Decel.text()
float_tmp = float(str_tmp)
self.Zmc.set_deceleration(self.axis_Num,float_tmp)
# 設(shè)置原點(diǎn)開關(guān)
str_tmp = self.ui.edit_zeroIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_datum_in(self.axis_Num,float_tmp)
# 反轉(zhuǎn) ZMC系列認(rèn)為OFF時(shí)碰到了原點(diǎn)信號(hào)(常閉) ,如果是常開傳感器則需要反轉(zhuǎn)輸入口,ECI系列的不需要反轉(zhuǎn)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 設(shè)置正限位輸入信號(hào)開關(guān)
str_tmp = self.ui.edit_FWDIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_fwd_in(self.axis_Num,float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 設(shè)置負(fù)限位輸入信號(hào)開關(guān)
str_tmp = self.ui.edit_REVIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_rev_in(self.axis_Num, float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp, 1)
# 單軸回零
self.Zmc.single_datum(self.axis_Num,self.mode)
(5)通過停止運(yùn)動(dòng)按鈕的事件處理函數(shù)來停止當(dāng)前的運(yùn)動(dòng)。
def on_btn_stop_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未連接控制器")
return
#如果已經(jīng)停止則無需操作
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if isidle:
return
self.Zmc.single_cancel(self.axis_Num,2)
(6)通過坐標(biāo)清零按鈕的事件處理函數(shù)來對(duì)當(dāng)前軸的坐標(biāo)進(jìn)行對(duì)應(yīng)清零。
def on_btn_clear_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未連接控制器")
return
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if not isidle:
QMessageBox.warning(self.ui,"警告","運(yùn)動(dòng)未暫停,不可清零")
return
self.Zmc.set_target_pos(self.axis_Num,0)
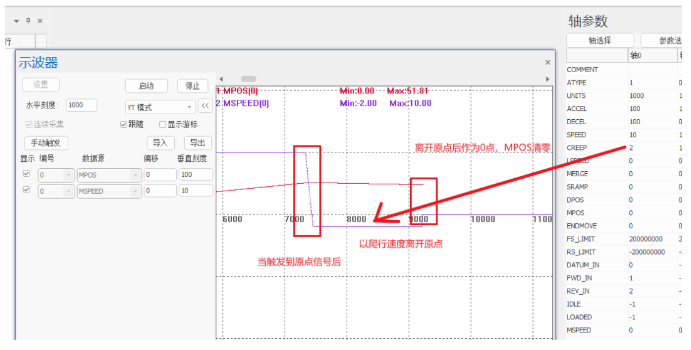
三、調(diào)試與監(jiān)控
編譯運(yùn)行例程,同時(shí)通過RtSys軟件連接控制器對(duì)控制器狀態(tài)進(jìn)行監(jiān)控。
本次,正運(yùn)動(dòng)技術(shù)全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(五):IO配置與回零運(yùn)動(dòng)的Python+QT開發(fā),就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來源。
審核編輯:湯梓紅
-
控制器
+關(guān)注
關(guān)注
114文章
16998瀏覽量
183170 -
總線
+關(guān)注
關(guān)注
10文章
2953瀏覽量
89410 -
運(yùn)動(dòng)控制
+關(guān)注
關(guān)注
4文章
641瀏覽量
33406 -
python
+關(guān)注
關(guān)注
56文章
4825瀏覽量
86294 -
ethercat
+關(guān)注
關(guān)注
19文章
1032瀏覽量
39678 -
正運(yùn)動(dòng)技術(shù)
+關(guān)注
關(guān)注
0文章
118瀏覽量
615
發(fā)布評(píng)論請(qǐng)先 登錄
EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(三):PDO配置與SDO讀寫
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(六):RtBasic文件下載與連續(xù)軌跡加工的Python+Qt開發(fā)

EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(二):回零# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制器# 運(yùn)動(dòng)控制

EtherCAT運(yùn)動(dòng)控制器上位機(jī)開發(fā)之Python+Qt(三):PDO配置與SDO讀寫# 運(yùn)動(dòng)控制器# 控制卡
正運(yùn)動(dòng)技術(shù)運(yùn)動(dòng)控制器EtherCAT總線快速入門
EtherCAT運(yùn)動(dòng)控制器進(jìn)行自定義API封裝例程
運(yùn)動(dòng)控制器軸回零的配置與實(shí)現(xiàn)
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器-ZMC432H

全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(一):ZMC432H硬件接口
全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(四):軸參數(shù)配置與單軸運(yùn)動(dòng)PC上位機(jī)C++控制

EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H的軸參數(shù)配置和單軸運(yùn)動(dòng)控制

全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(五):IO配置與回零運(yùn)動(dòng)的Python+Qt開發(fā)

全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器(六):RtBasic文件下載與連續(xù)軌跡加工的Python+Qt開發(fā)

全國(guó)產(chǎn)EtherCAT運(yùn)動(dòng)控制邊緣控制器ZMC432H如何使用Python+QT實(shí)現(xiàn)連續(xù)軌跡加工

EtherCAT運(yùn)動(dòng)控制器上位機(jī)之Python+Qt(一):鏈接與單軸運(yùn)動(dòng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論