 全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發
全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發
今天,正運動小助手給大家分享一下全國產EtherCAT運動控制邊緣控制器ZMC432H如何使用Python+QT實現單軸回零運動控制開發。
01
功能簡介
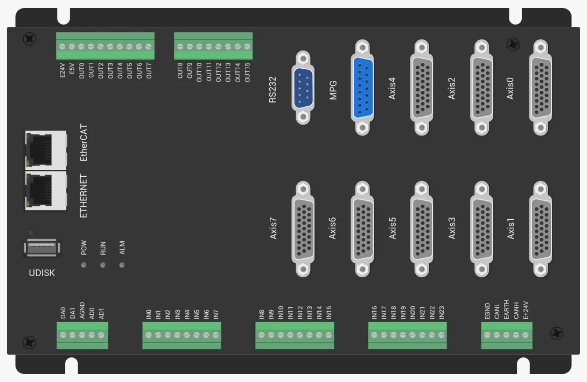
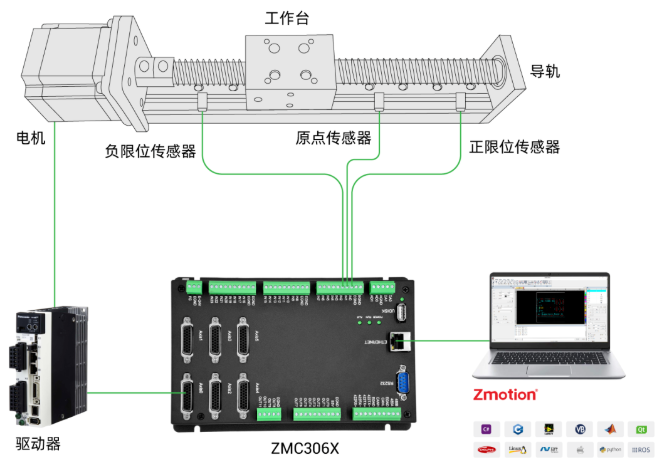
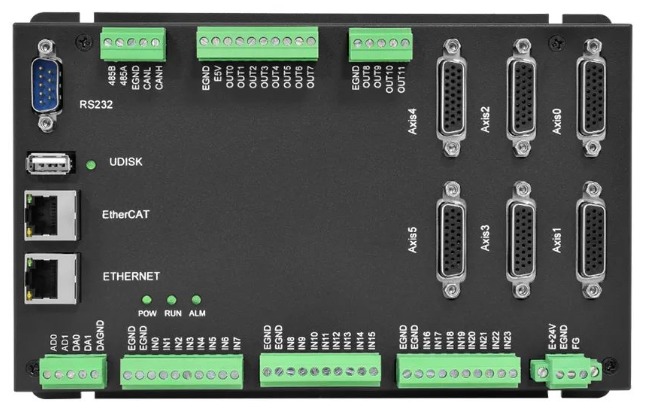
全國產EtherCAT運動控制邊緣控制器ZMC432H是正運動的一款軟硬件全國產自主可控,運動控制接口兼容EtherCAT總線和脈沖型的獨立式運動控制器,最多支持32軸運動控制,同時支持正運動遠程HMI功能,能提供網絡組態顯示,可實時監控和調整參數配置。
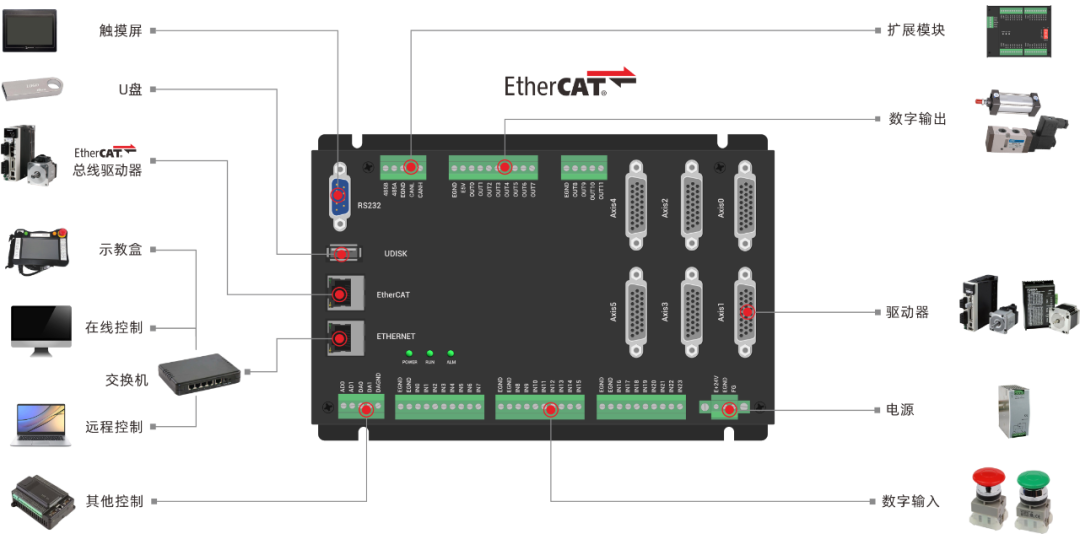
ZMC432H內置了Linux系統,可以使用本地的LOCAL接口進行連接,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間為40us左右。
 ZMC432H視頻介紹:
ZMC432H視頻介紹:
02
Python+QT進行運動控制開發
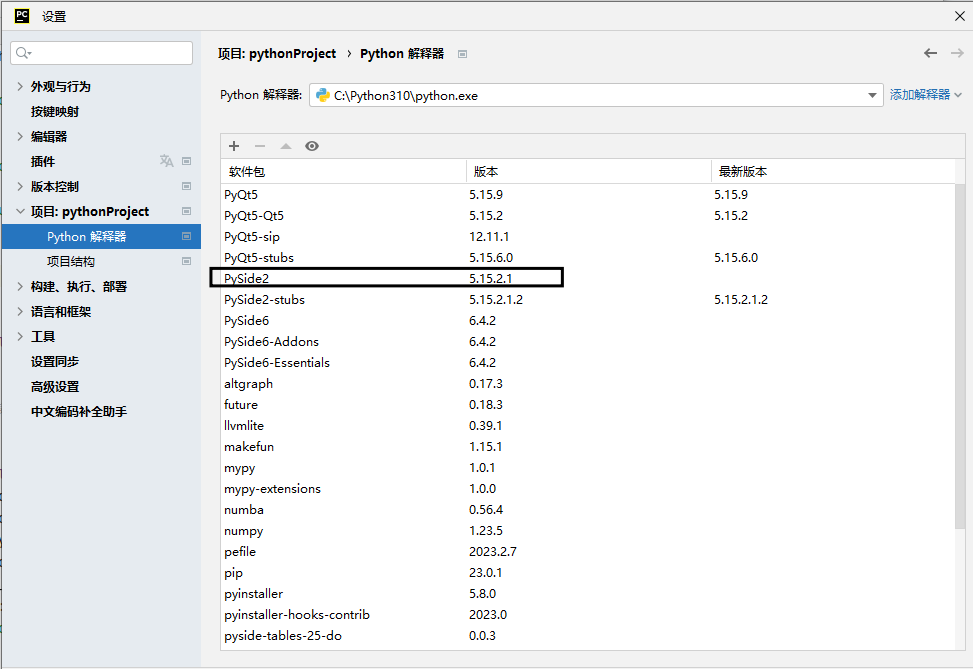
一.配置好python+Qt開發環境,以及安裝好所需工具1、下載python解釋器。2、安裝pyside2或者pyside6根據python解釋器的版本來選擇,高版本的解釋器使用pyside6。安裝pyside2有以下兩種方式:
方式一:使用win+r打開運行界面,然后輸入cmd(在安裝python解釋器的時候要根據安裝向導配置好環境變量,否則后面的指令不會執行成功),pipinstall pyside2 -i https://pypi.douban.com/simple/;方式二:在pycharm中安裝。
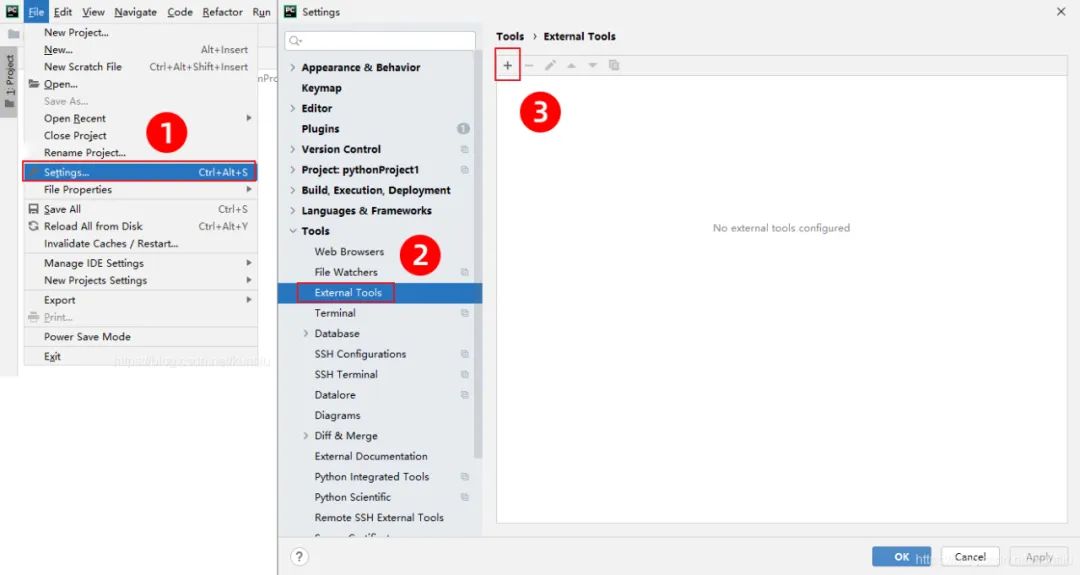
3、安裝好PyCharm Community Edition,在如下界面點擊+號,安裝所需的工具,如pyside2。
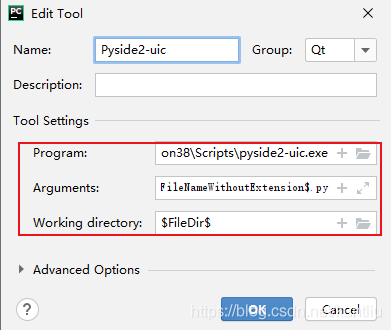
(1)按照如圖步驟打開Tool的編輯框。
a.Program填寫:Python安裝目錄 Scriptspyside2-uic.exe;
b.Arguments填寫:$FileName$ -o $FileNameWithoutExtension$.py;
c.Working directory填寫:$FileDir$。
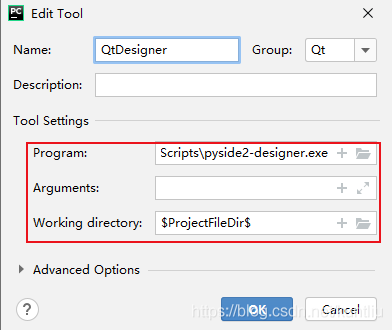
 (3)自定義QtDesigner:
(3)自定義QtDesigner:
a.Program填寫:Python安裝目錄 Scriptspyside2-designer.exe;
b.Working directory填寫:$ProjectFileDir$。
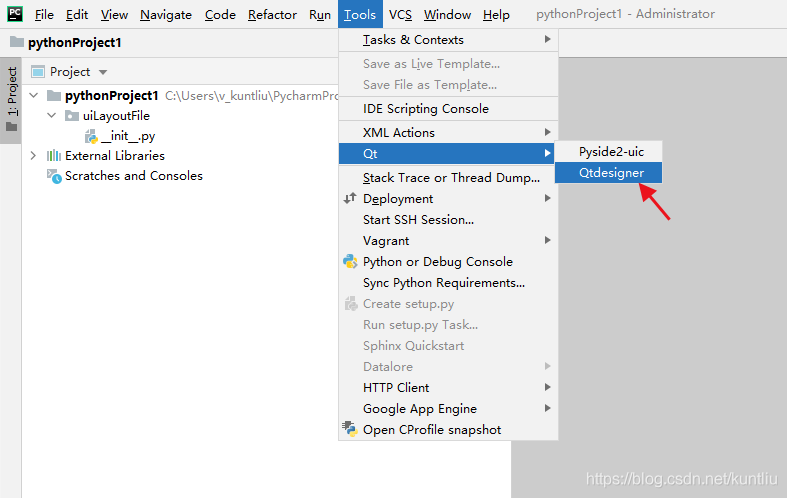
 將自定義工具配置好之后就可以直接在PyCharm的菜單中直接使用了。
將自定義工具配置好之后就可以直接在PyCharm的菜單中直接使用了。
1、點擊Tools → Qt → Qtdesigner即可進入UI的設計界面。
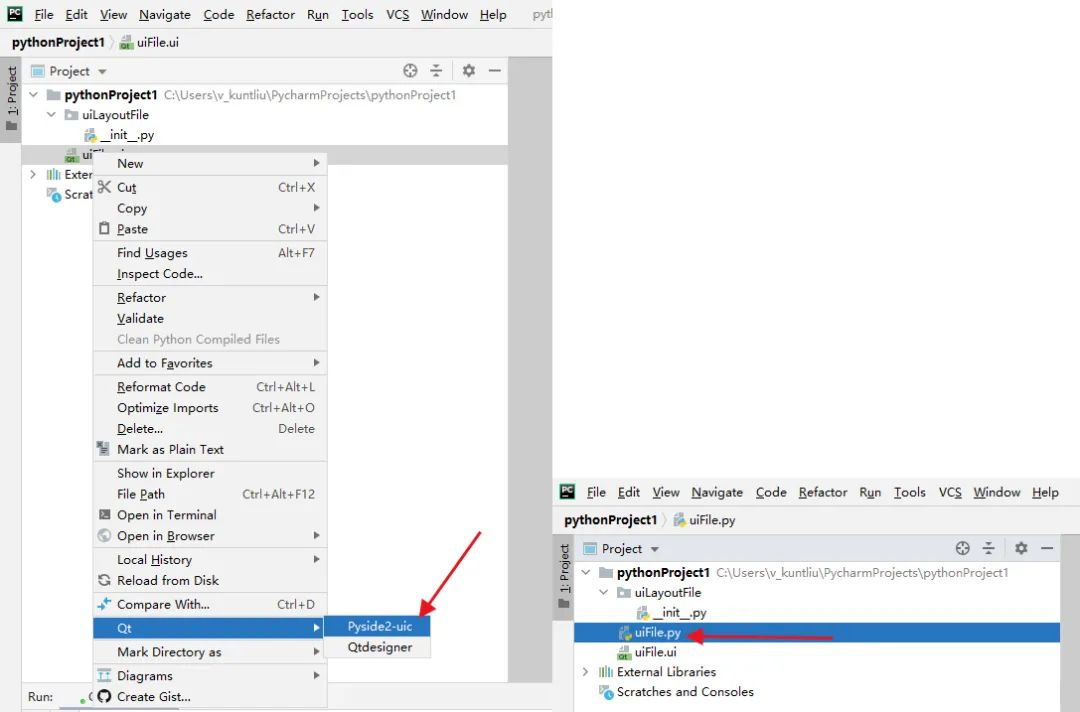
 2、右鍵ui文件,點擊Qt → Pyside2-uic即可生成ui文件的py文件。
2、右鍵ui文件,點擊Qt → Pyside2-uic即可生成ui文件的py文件。
二.新建Python項目并添加函數庫
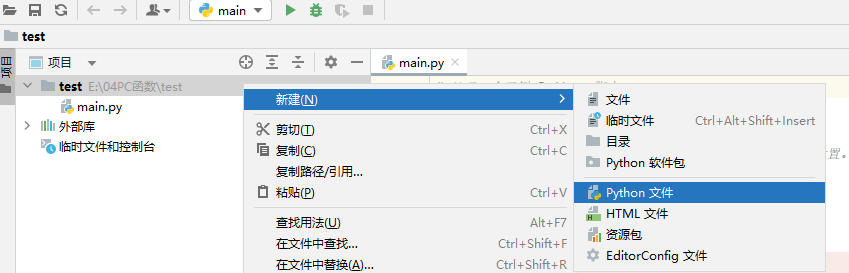
1、使用PyCharm Community Edition 2022打開一個新建的文件夾或者在進入PyCharm Community Edition 2022之后新建一個目錄,并在目錄中添加Python文件。
A.進入廠商提供的光盤資料找到“04.PC函數”文件夾,并點擊進入。


D.選擇“庫文件與例程”文件夾。
三、查看PC函數手冊,熟悉相關函數接口。
1、PC函數手冊也在光盤資料里面,具體路徑如下:“光盤資料4.PC函數MotionPC函數庫編程手冊及其例程源碼MotionPC函數庫編程手冊V2.1.1.pdf”。

2、鏈接控制器,獲取鏈接句柄。
(1)ZAux_OpenEth()接口說明:
|
指令7 |
ZAux_OpenEth |
|
指令原型 |
int32 __stdcall ZAux_OpenEth(char *ipaddr, ZMC_HANDLE * phandle) |
|
指令說明 |
以太網鏈接控制器。 |
|
輸入參數 |
輸入參數1個,詳細見下面說明。 |
|
ipaddr |
鏈接的IP地址。 |
|
輸出參數 |
輸出參數1個,詳細見下面說明。 |
|
Phandle |
返回的鏈接句柄。 |
|
返回值 |
詳細見錯誤碼說明。 |
(2)配置IO信號點對應函數接口說明:
|
指令 |
說明 |
|
ZAux_Direct_SetDatumIn |
設置軸原點信號 |
|
ZAux_Direct_SetFwdIn |
設置軸正向限位信號 |
|
ZAux_Direct_SetRevIn |
設置軸負向限位信號 |
|
ZAux_Direct_SetAlmIn |
設置軸伺服告警信號 |
|
ZAux_Direct_SetInvertIn |
設置輸入口信號反轉狀態 |
|
ZAux_Direct_GetDatumIn |
讀取原點信號 |
|
ZAux_Direct_GetFwdIn |
讀取軸正向限位信號 |
|
ZAux_Direct_GetRevIn |
讀取負向限位信號 |
|
ZAux_Direct_GetAlmIn |
讀取伺服告警信號 |
(3)以下為回零運動調用接口,以及對回零模式的詳細說明:加10表示碰到限位后反找, 不會碰到限位停止,例如13=模式3+限位反找10,用于原點在正中間的情況。
|
指令78 |
ZAux_Direct_Single_Datum |
|
指令原型 |
int32 __stdcall ZAux_Direct_Single_Datum(ZMC_HANDLE handle, int iaxis, int imode) |
|
指令說明 |
單軸回零運動。 |
|
輸入參數 |
共有3個輸入參數,見下方說明。 |
|
handle |
鏈接標識。 |
|
iaxis |
軸號。 |
|
imode |
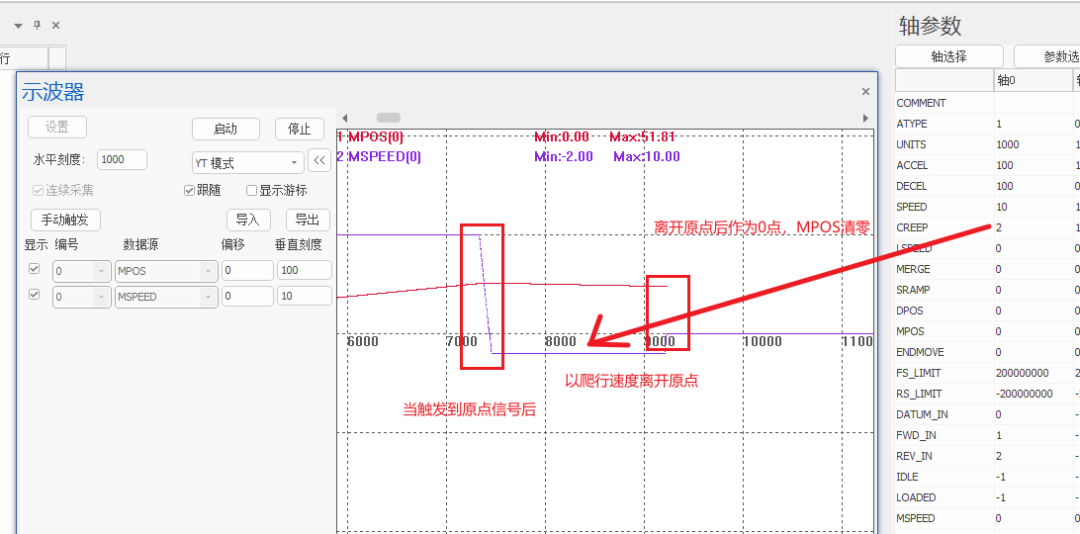
模式 0 清除所有軸的錯誤狀態。 1 軸以CREEP速度正向運行直到Z信號出DPOS值重置為0同時糾正MPOS。 2 軸以CREEP速度反向運行直到Z信號出現。DPOS值重置為0同時糾正MPOS。 3 軸以SPEED速度正向運行,直到碰到原點開關。然后軸以CREEP速度反向運動直到離開原點開關。DPOS值重置為0同時糾正MPOS 4 軸以SPEED速度反向運行,直到碰到原點開關。然后軸以CREEP速度正向運動直到離開原點開關。DPOS值重置為0同時糾正MPOS。 5 軸以SPEED速度正向運行,直到碰到原點開關。然后軸以CREEP速度反向運動直到離開原點開關,然后再繼續以爬行速度反轉直到碰到Z信號。DPOS值重置為0同時糾正MPOS 6 軸以SPEED速度反向運行,直到碰到原點開關。然后軸以CREEP速度正向運動直到離開原點開關,然后再繼續以爬行速度正轉直到碰到Z信號。DPOS值重置為0同時糾正MPOS。 |
四.Python+Qt開發控制器單軸回零例程。
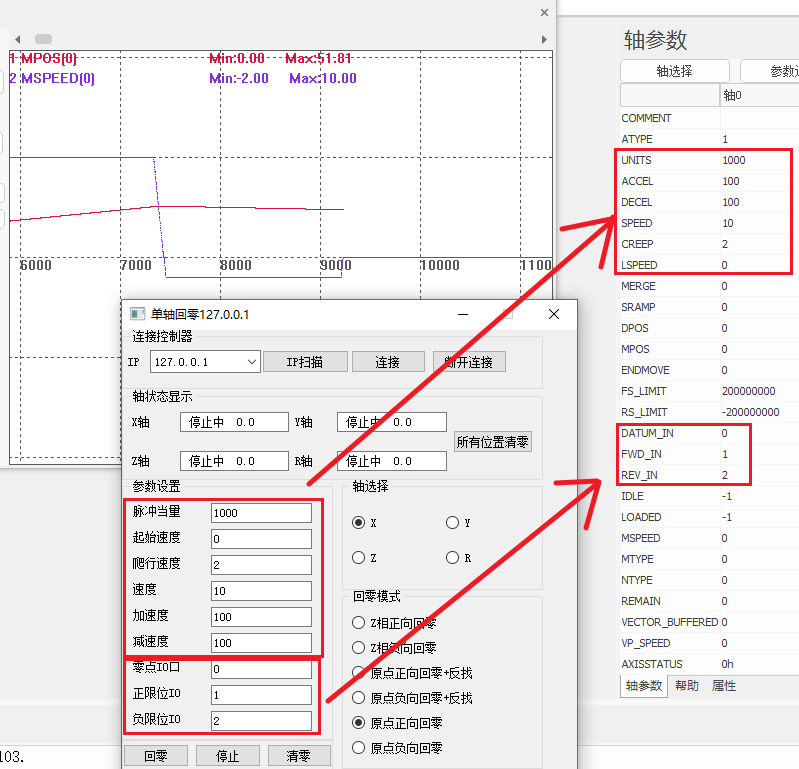
1、例程界面如下。
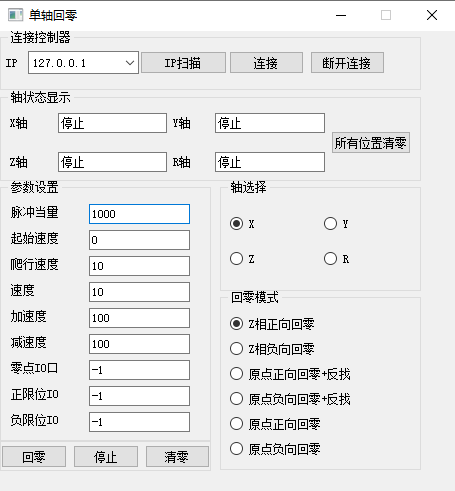
2、程序示例如下。
(1)Python中加載qt的UI文件;
from PySide2.QtWidgets import QMessageBox
from PySide2.QtCore import QFile, QTimer
from PySide2.QtUiTools import QUiLoader
q_state_file = QFile("mainweiget.ui")
q_state_file.open(QFile.ReadOnly)
self.ui = QUiLoader().load(q_state_file)
q_state_file.close()
注:此時self.ui表示了qt中的ui。
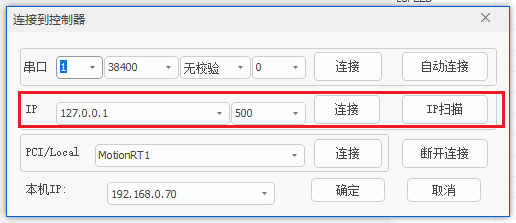
(2)鏈接按鈕的事件處理函數中調用鏈接控制器的接口函數ZAux_OpenEth(),與控制器進行鏈接,鏈接成功后啟動定時器1監控控制器狀態。
def on_btn_open_clicked(self):
strtemp = self.ui.comboBox.currentText()
print("當前的ip是:",strtemp)
if self.Zmc.handle.value is not None:
self.Zmc.close()
self.time1.stop()
self.ui.setWindowTitle("單軸回零")
iresult = self.Zmc.open_eth(strtemp)
if 0 != iresult:
QMessageBox.warning(self.ui, "提示", "連接失敗")
else:
QMessageBox.warning(self.ui, "提示", "連接成功")
str_title = self.ui.windowTitle() + strtemp
self.ui.setWindowTitle(str_title)
self.Up_State()
self.time1.start(100)
(3)通過定時器監控控制器狀態。
def Up_State(self):
idlelist = [ctypes.c_int(-1) for i in range(0, 4)]
fdposlist = [ctypes.c_float(0) for i in range(0, 4)]
for i in range(0, 4):
self.Zmc.get_target_pos(i, fdposlist[i]) # 獲取當前軸位置
self.Zmc.get_idle(i,idlelist[i])#判斷當前軸狀態
str1 = " {} {} ".format("停止中" if idlelist[0].value else "運行中", round(fdposlist[0].value, 2))
self.ui.lineEdit_X.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[1].value else "運行中", round(fdposlist[1].value, 2))
self.ui.lineEdit_Y.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[2].value else "運行中", round(fdposlist[2].value, 2))
self.ui.lineEdit_Z.setText(str1)
str1 = " {} {} ".format("停止中" if idlelist[3].value else "運行中", round(fdposlist[3].value, 2))
self.ui.lineEdit_R.setText(str1)
(4)使用回零按鈕的事件處理函數對回零運動前的參數進行初始化以及調用對應的回零模式操作回零運動。
def on_btn_run_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui, "警告", "未連接控制器")
return
ifidle = ctypes.c_int(0)
self.Zmc.get_idle(self.axis_Num,ifidle)
if 0 == ifidle:
QMessageBox.warning(self.ui, "提示", "運動未停止")
return
# 設定軸類型 7 - 脈沖軸類型 + 編碼器Z信號 不用EZ回零也可以設置為1
self.Zmc.set_axis_type(self.axis_Num,7 if self.mode < 3 else 1)
# 設定脈沖模式及邏輯方向(脈沖 + 方向)
self.Zmc.set_invert_step(self.axis_Num,0)
# 設置當量
str_tmp = self.ui.edit_Units.text()
float_tmp = float(str_tmp)
self.Zmc.set_units(self.axis_Num,float_tmp)
# 設置爬行速度
str_tmp = self.ui.edit_CLSpeed.text()
float_tmp = float(str_tmp)
self.Zmc.set_creep(self.axis_Num,float_tmp)
# 設置速度
str_tmp = self.ui.edit_Speed.text()
float_tmp = float(str_tmp)
self.Zmc.set_speed(self.axis_Num,float_tmp)
# 設置加速度
str_tmp = self.ui.edit_Accel.text()
float_tmp = float(str_tmp)
self.Zmc.set_acceleration(self.axis_Num,float_tmp)
# 設置減速度
str_tmp = self.ui.edit_Decel.text()
float_tmp = float(str_tmp)
self.Zmc.set_deceleration(self.axis_Num,float_tmp)
# 設置原點開關
str_tmp = self.ui.edit_zeroIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_datum_in(self.axis_Num,float_tmp)
# 反轉 ZMC系列認為OFF時碰到了原點信號(常閉) ,如果是常開傳感器則需要反轉輸入口,ECI系列的不需要反轉
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 設置正限位輸入信號開關
str_tmp = self.ui.edit_FWDIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_fwd_in(self.axis_Num,float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp,1)
# 設置負限位輸入信號開關
str_tmp = self.ui.edit_REVIO.text()
float_tmp = int(str_tmp)
self.Zmc.set_rev_in(self.axis_Num, float_tmp)
if float_tmp != -1:
self.Zmc.set_invert_in(float_tmp, 1)
# 單軸回零
self.Zmc.single_datum(self.axis_Num,self.mode)
(5)通過停止運動按鈕的事件處理函數來停止當前的運動。
def on_btn_stop_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未連接控制器")
return
#如果已經停止則無需操作
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if isidle:
return
self.Zmc.single_cancel(self.axis_Num,2)
(6)通過坐標清零按鈕的事件處理函數來對當前軸的坐標進行對應清零。
def on_btn_clear_clicked(self):
if self.Zmc.handle.value is None:
QMessageBox.warning(self.ui,"警告","未連接控制器")
return
isidle = ctypes.c_int(-1)
self.Zmc.get_idle(self.axis_Num,isidle)
if not isidle:
QMessageBox.warning(self.ui,"警告","運動未暫停,不可清零")
return
self.Zmc.set_target_pos(self.axis_Num,0)
03
調試與監控
編譯運行例程,同時通過RtSys軟件連接控制器對控制器狀態進行監控。
Python+QT進行單軸回零運動例程講解。
-
控制器
+關注
關注
114文章
16980瀏覽量
183010 -
運動控制器
+關注
關注
2文章
445瀏覽量
25159 -
python
+關注
關注
56文章
4825瀏覽量
86229
原文標題:全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發
文章出處:【微信號:伺服與運動控制,微信公眾號:伺服與運動控制】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
EtherCAT運動控制器上位機開發之Python+Qt(三):PDO配置與SDO讀寫


正運動技術運動控制器EtherCAT總線快速入門
EtherCAT運動控制器進行自定義API封裝例程

全國產EtherCAT運動控制邊緣控制器(四):軸參數配置與單軸運動PC上位機C++控制


全國產EtherCAT運動控制邊緣控制器(五):IO配置與回零運動的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器(六):RtBasic文件下載與連續軌跡加工的Python+Qt開發

全國產EtherCAT運動控制邊緣控制器ZMC432H如何使用Python+QT實現連續軌跡加工







 工商網監
工商網監
評論