") 智能車方向控制典型環(huán)節(jié)分析
智能車方向控制典型環(huán)節(jié)分析

方向控制
典型環(huán)節(jié)對應(yīng)

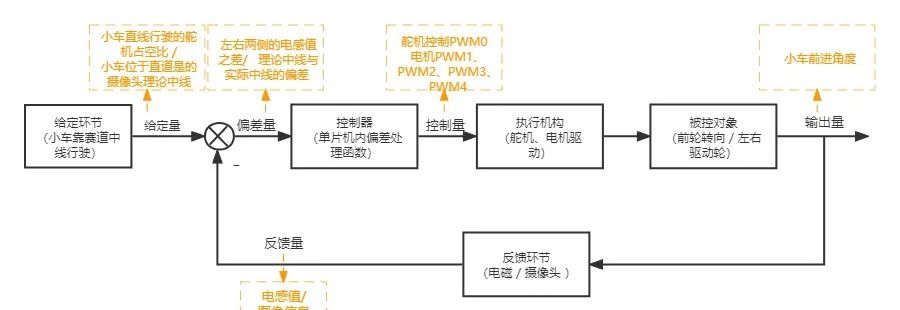
由于車模結(jié)構(gòu)的不同,小車方向控制的各環(huán)節(jié)會有所區(qū)別,例如L車、B車的執(zhí)行結(jié)構(gòu)只有舵機;F車、E車的執(zhí)行機構(gòu)只有驅(qū)動輪;
而C車的執(zhí)行機構(gòu)既有舵機又有驅(qū)動輪。這里以C車為例,各自動控制系統(tǒng)環(huán)節(jié)與小車實際對應(yīng)關(guān)系如下圖所示:
典型環(huán)節(jié)分析
給定環(huán)節(jié)與給定量
給定環(huán)節(jié)可以理解為電磁模塊和攝像頭模塊,給定量可以理解為小車位于直道行駛是的舵機控制占空比值或者攝像頭的理論中線值。
比較環(huán)節(jié)與偏差量
比較環(huán)節(jié)在智能車系統(tǒng)中可以理解為單片機的偏差計算函數(shù),偏差量就是該函數(shù)計算出的誤差值。下面是電磁偏差計算代碼片。
// 此代碼一般放在定時其中斷,保證偏差計算的時序穩(wěn)定
//電感采集獲取賽道信息,三電感 000 000 000 //
L=adc_once(ADC_P00, ADC_10BIT);//左電感值
M=adc_once(ADC_P01, ADC_10BIT);//中間電感值
R=adc_once(ADC_P05, ADC_10BIT);//右電感值
My_Direction.NowError=50*(R-L)/(L+M+R);//**差比和**計算偏差
//My_Direction.NowError就是偏差量
而攝像頭的偏差量主要是通過計算前瞻的數(shù)值與理想中值的差值或者計算曲率來獲取,這個部分打算后面專門出一篇描述攝像頭的文章,在此不做詳細(xì)描述。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
模塊
+關(guān)注
關(guān)注
7文章
2786瀏覽量
50120 -
智能車
+關(guān)注
關(guān)注
21文章
409瀏覽量
77512
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
基于虛擬儀器技術(shù)的智能車仿真系統(tǒng)
針對“飛思卡爾”杯全國大學(xué)生智能車邀請賽,本文開發(fā)了基于LabVIEW虛擬儀器技術(shù)的Plastid仿真系統(tǒng),該系統(tǒng)可針對不同的賽車、賽道、路徑識別方案、控制策略等內(nèi)容,進(jìn)行相關(guān)分析,大大提高智
發(fā)表于 03-07 10:32
智能車設(shè)計基礎(chǔ)
智能車設(shè)計基礎(chǔ) 第10章.rar http://filemarkets.com/file/bai2471/9d9e6c95/智能車設(shè)計基礎(chǔ) 第3章.rar: http://www.t00y.com
發(fā)表于 10-21 21:11
觸屏尋跡智能車使用“安芯一號”SLH89F5162
坐標(biāo)給受控端(基于“安芯一號”的智能車)受控端主要實現(xiàn)用戶路徑的識別、機器人行進(jìn)速度和方向的確定等,并將最終的速度、方向計算結(jié)果通過無線方式發(fā)送到小車控制板,以實現(xiàn)
發(fā)表于 10-15 12:46
多功能智能車
我們要設(shè)計的智能車具有多種功能,可實現(xiàn)wifi遠(yuǎn)程控制,主人可遠(yuǎn)程監(jiān)控并控制房屋內(nèi)的各種設(shè)置
發(fā)表于 10-20 11:13
labview智能車參考程序(fuzzy 控制)
最近在做智能車的材料,想用Labview實現(xiàn)控制,發(fā)現(xiàn)了例程中的這個用模糊算法控制倒車的程序文件,感覺受益很大,特意發(fā)到這里,希望有需要的同學(xué)也能有點收獲。
發(fā)表于 02-05 14:55
樹莓派智能車AlphaBot系列教程
;catid=57樹莓派智能車AlphaBot教程1:人生若只如初見 ...樹莓派智能車AlphaBot教程2:直流電機控制 ... 樹莓派智能車AlphaBot教程3:避障樹莓派
發(fā)表于 05-15 15:39
智能車制作相關(guān)資料分享
朋友組隊前言 此篇獻(xiàn)給GDOU的學(xué)子們,或許不是那么政治正確一、智能車是什么智能車總體概要智能車是大學(xué)生團(tuán)體比賽,通常由三個人組成隊伍。涉及多個領(lǐng)域的知識,包括計算機編程,涉及電路板,隊友間的團(tuán)隊協(xié)作,
發(fā)表于 01-17 07:48
智能車電磁檢測控制技術(shù)研究
在智能車傳統(tǒng)PID、PD控制的基礎(chǔ)上進(jìn)行改進(jìn),提出了一種更為穩(wěn)定快速的循跡控制方法。智能車的方向控制
發(fā)表于 03-18 18:16
?97次下載
電磁智能車原理
環(huán)境感知、規(guī)劃決策和運動控制三大部分,涵蓋了自動控制、模式識別、傳感技術(shù)、電子、計算機、機械、能源等多個學(xué)科知識。 電磁智能車想要正常行駛在賽道上,必定是需要實時根據(jù)賽道的狀態(tài)來調(diào)整車身姿態(tài)的,那么電磁






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論