 PID臨界比例法和一般調節法介紹
PID臨界比例法和一般調節法介紹

臨界比例法
內容
在閉環的控制系統里,將調節器置于純比例作用下,從小到大逐漸調節比例系數,直到系統曲線出現等幅振蕩,再根據經驗公式計算參數。
調節思路
① 將積分、微分系數置零,比例度取適當值,平衡操作一段時間,使控制系統按純比例作用的方式投入運行
② 慢慢地增大比例系數,細心觀察曲線的變化情況。如果控制過程的曲線波動是衰減的,則把比例系數繼續增大;如果曲線波動是發散的,則應把比例系數減小,直至曲線波動呈等幅振蕩,此時記下臨界比例系數 δK 和臨界振蕩周期 Tk 的值
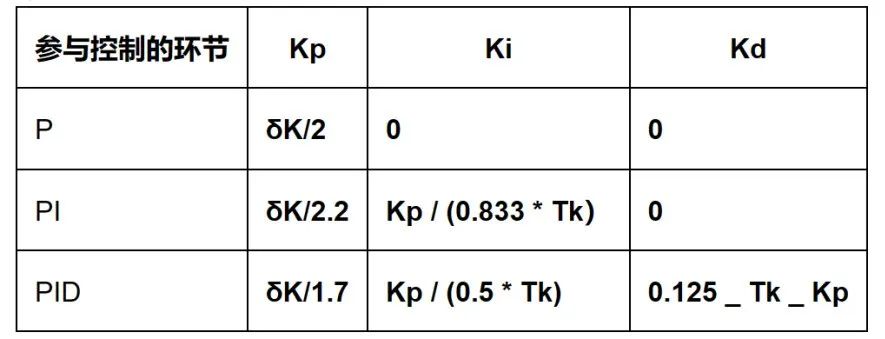
③ 根據記下的比例系數和周期,采用經驗公式,計算調節器的參數
一般調節法
內容
這種方法針對一般的 PID 控制系統所以稱之為一般調節法。
調節思路
① 首先將積分、微分系數置零,使系統為純比例控制。控制對象的值設定為系統允許的最大值的 60%~70%,接著逐漸增大比例系數,直至系統出現振蕩;
此時再逐漸減小比例系數,直至系統振蕩消失,然后記錄此時的比例系數,并設定系統的比例系數為當前值的 60%~70%
② 確定比例系數后,設定一個較小的積分系數,然后逐漸增大積分系數,直至系統出現振蕩;此時在逐漸減小積分系數,直至系統振蕩消失,然后記錄此時的積分系數,并設定系統的積分系數為當前值的 55%~65%
③ 微分系數一般不用設定,為 0 即可。若系統出現小幅度振蕩,并且通過 PI 環節無法優化,這可以采用與確定比例、積分系數相同的方法,微分系數取系統不振蕩時的 30%左右。
④ 系統空載、帶載聯調,再對 PID 參數進行微調,直至滿足要求
在使用PID時,如果只使用一個參數是沒有意義,至少使用兩個參數,并且P(比例項)是必須要有的
雖然PID有三個參數,但大多數情況下PID三個參數并不是都使用上的,一般會其中兩個來組合使用,比如PI組合用于追求穩定的系統,PD組合用于追求快速響應的系統
當然PID用于即追求穩定又追求快速響應的系統,但是實際上PID參數越多越難調,而且許多情況下兩個參數的效果已經足夠了,所以我一般根據情況使用前兩個。
-
控制系統
+關注
關注
41文章
6768瀏覽量
111904 -
PID
+關注
關注
37文章
1480瀏覽量
87617 -
調節器
+關注
關注
5文章
876瀏覽量
47529
發布評論請先 登錄
labivew PID.VI只用比例調節怎么一點超調都沒有
經驗法整定PID參數的實用口訣
最簡單也最經典:學習一下PID 控制算法
關于湊試法來確定PID的參數
在線測量法一般有哪些步驟?
PID參數整定試湊法介紹





 工商網監
工商網監
評論