 基于車輛動力學模型的橫向控制
基于車輛動力學模型的橫向控制
基于車輛運動學模型的方法忽略了車輛的動力學特性,因此在車速過快或者曲率變化率過大的情況下該算法無法滿足車輛的穩定性控制要求。
這里介紹一種典型的基于車輛動力學模型的橫向控制方法,包括:
- 車輛線性二自由度動力學模型的構建
- 車輛路徑跟蹤偏差狀態方程的構建
- LQR 橫向控制算法的求解
車輛線性二自由度動力學模型
對于基于車輛動力學模型的控制方法,首要的工作是對車輛動力學進行建模,由于車輛動力學模型具有強 非線性時變 的特性,因此精確建模整個車輛動力學十分困難。
在橫向控制中,主要關心的是車輛橫向運動特性,通常將車輛動力學模型簡化為的二自由度橫向動力學模型。假設車身的縱向速度Vx 保持不變, 其橫向動力學模型的兩個自由度為:
- 橫向運動
- 橫擺運動
由于精確的二自由度動力學模型是非線性的,為了便于進行實時的跟蹤控制計算,通常還需要在精確的二自由度動力學模型基礎上進行一些簡化近似,得到線性二自由度動力學模型。
這里介紹基于 轉向小角度 及 **輪胎動力學 **線性化假設下的車輛線性二自由度動力學模型。
下圖為車輛為車輛橫向動力學坐標系示意圖:



因此:

將(3-2)代入(3-1)可得:

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
車輛
+關注
關注
0文章
84瀏覽量
15428 -
模型
+關注
關注
1文章
3500瀏覽量
50134 -
無人駕駛
+關注
關注
99文章
4162瀏覽量
123091
發布評論請先 登錄
相關推薦
熱點推薦
輪轂電機驅動電動汽車垂向動力學控制研究綜述
從輪轂電機驅動電動汽車整車動力學特性、簧下質量增加對車輛動力學性能影響以及輪 轂電機不平衡電磁力對車輛動力學性能影響 3 個方面,介紹了 國
發表于 03-07 15:21
基于多體系統動力學的空氣懸架大客車平順性試驗仿真研究
基于多體系統動力學的空氣懸架大客車平順性試驗仿真研究本文以空氣懸架大客車為研究對象,采用多體系統動力學的理論方法,應用ADAMS 軟件建立了DD6115H 型空氣懸架大客車八十五自由度整車動力學
發表于 12-02 12:38
帶齒輪傳動的機車-軌道空間耦合動力學模型
文章目錄Introduction帶齒輪傳動的機車-軌道空間耦合動力學模型Experiments and ResultsConclusionIntroduction在運行過程中,由于齒輪傳動系統繼承
發表于 08-27 06:29
車輛動力學控制系統(VDC)是什么意思
車輛動力學控制系統(VDC)是什么意思
車輛運動的理論狀態只能根據駕駛員的輸入來描述,這些輸入包括轉向盤角度、油門踏板確定的發動機扭矩
發表于 03-11 17:44
?1.7w次閱讀
灰色預測模型的系統動力學仿真
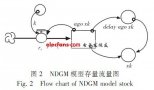
針對 灰色預測模型 的仿真擬合問題展開研究,運用系統動力學方法,針對GM(1,1)模型、DGM模型、NDGM模型等3種灰色預測
發表于 08-01 14:30
?26次下載
如何使用DSPACE實現嵌入式車輛動力學仿真平臺的開發設計
針對嵌入式車輛動力學仿真平臺開發需求,基于吉林大學汽車仿真與控制國家重點實驗室的車輛動力學模型,
發表于 09-10 14:54
?8次下載
經緯恒潤自主研發的綜合車輛動力學仿真軟件ModelBase
車輛動力學模型是仿真測試系統的核心組成部分,本次研討會結合經緯恒潤的實際工程經驗,介紹車輛動力學模型
綜合車輛動力學仿真軟件ModelBase的簡單介紹
車輛動力學模型是仿真測試系統的核心組成部分,本次研討會結合經緯恒潤的實際工程經驗,介紹車輛動力學模型
鋼軌打磨對車輛系統動力學的影響
以道岔鋼軌為研究對象,對線路鋼軌實施個性化廓形打磨,采用Simpack建立車輛系統動力學模型,分析鋼軌打磨前后輪軌動力學性能變化。實驗結果表明,鋼軌實施打磨后輪軌接觸幾何分布較打磨前均

直播回顧 |車輛動力學模型在仿真測試中的應用實踐
車輛動力學模型是仿真測試系統的核心組成部分,本次研討會結合經緯恒潤的實際工程經驗,介紹車輛動力學模型


基于車輛運動學和動力學模型的橫向控制算法
無模型的 PID 橫向控制算法參數少,簡單易用,但是由于沒有考慮車輛系統動力學特性及路徑本身的動態變化特性,對外界干擾的魯棒性較差。 在高速
基于動力學模型的機器人介紹
機器人具有高度非線性,強時變以及強耦合等動力學特性,為了提高機器人控制的性能,研究人員提出了基于模型的控制(Model Based Control)方法。 在機器人研究領域,多種常見的





 工商網監
工商網監
評論