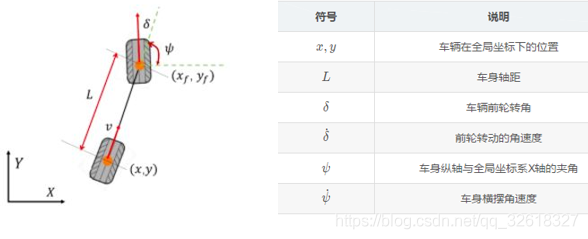
") 基于車輛運動學(xué)和動力學(xué)模型的橫向控制算法
基于車輛運動學(xué)和動力學(xué)模型的橫向控制算法
無模型的 PID 橫向控制算法參數(shù)少,簡單易用,但是由于沒有考慮車輛系統(tǒng)動力學(xué)特性及路徑本身的動態(tài)變化特性,對外界干擾的魯棒性較差。
在高速或曲率較大的彎道場景時,會出現(xiàn)較大的跟蹤誤差和“畫龍”現(xiàn)象,因此,該方法比較適合應(yīng)用于低速曲率較小的路徑跟蹤控制場景中。
基于運動學(xué)模型的橫向控制算法中,Pure Pursuit 和 Stanley 前輪反饋算法在中低速場景下,他們的路徑跟蹤的性能較好。
Pure Pursuit 在大的跟蹤誤差和非連續(xù)的路徑場景下魯棒性較好,其控制的關(guān)鍵在于對最佳前向預(yù)瞄距離的確定其中,增大前向預(yù)瞄距離將提高車輛控制的穩(wěn)定性。
但隨之會帶來路徑跟蹤性能降低及穩(wěn)態(tài)誤差增大的后果,表現(xiàn)出轉(zhuǎn)彎內(nèi)切現(xiàn)象。
相比于 Pure Pursuit 算法,Stanley 前輪反饋算法還額外考慮了橫擺角偏差,因此在大多數(shù)場景下,跟蹤性能更佳,然而,由于沒有設(shè)置前向預(yù)瞄,Stanley 算法會出現(xiàn)轉(zhuǎn)向過度的情況。
與 Pure Pursuit 和 Stanley 算法相比,后輪反饋控制算法計算更加復(fù)雜, 對路徑的平滑性要求更高。
在中等速度下的跟蹤性能及魯棒性與 Stanley 方法近似,然而在速度較大時,穩(wěn)態(tài)誤差也會變大,從而導(dǎo)致控制效果不佳。
LQR 算法使用二自由度動力學(xué)模型來設(shè)計橫向控制器,與前述基于運動學(xué)模型的幾種算法相比,LQR 參數(shù)調(diào)節(jié)更加復(fù)雜,其不僅需要獲取車輛自身的模型參數(shù)。
還需要調(diào)節(jié)LQR 目標(biāo)函數(shù)的 Q,R 矩陣以獲得較優(yōu)的跟蹤性能。
LQR 算法的優(yōu)點在于,通過與轉(zhuǎn)向前饋進(jìn)行有效結(jié)合,LQR 能夠很好的解決曲線行駛時的穩(wěn)態(tài)跟蹤誤差,在中等速度曲線行駛時其穩(wěn)態(tài)誤差趨近于零,從而極大提升跟蹤性能。
LQR 非常適用于路徑平滑的高速公路及城市駕駛場景,具有較好的車輛高速控制性能。
但是,由于模型的固有缺陷,LQR 與前饋控制的結(jié)合也無法解決所有跟蹤控制問題,由于該方法采用基于簡化后的二自由度動力學(xué)模型。
因此當(dāng)車輛運動不滿足二自由度動力學(xué)模型轉(zhuǎn)向小角度,或輪胎動力學(xué)線性化的假設(shè)條件時,LQR 算法的跟蹤性能會大幅降低,從而導(dǎo)致控制失效。
-
PID
+關(guān)注
關(guān)注
37文章
1480瀏覽量
87513 -
模型
+關(guān)注
關(guān)注
1文章
3500瀏覽量
50099 -
無人駕駛
+關(guān)注
關(guān)注
99文章
4160瀏覽量
123043 -
LQR
+關(guān)注
關(guān)注
1文章
6瀏覽量
3209
發(fā)布評論請先 登錄
輪轂電機(jī)驅(qū)動電動汽車垂向動力學(xué)控制研究綜述
Adams多體動力學(xué)仿真解決方案全面解析
分布式驅(qū)動電動汽車的動力學(xué)控制有哪幾種類型?常見問題是什么?
淺析伺服電動機(jī)機(jī)械系統(tǒng)
車輛動力學(xué)控制系統(tǒng)(VDC)是什么意思
Apollo控制算法中使用的車輛動力學(xué)模型的推導(dǎo)過程
機(jī)械動力學(xué)原理.pdf
綜合車輛動力學(xué)仿真軟件ModelBase的簡單介紹
自動駕駛控制概況

自動駕駛車輛控制(車輛運動學(xué)模型)
直播回顧 |車輛動力學(xué)模型在仿真測試中的應(yīng)用實踐

基于車輛動力學(xué)模型的橫向控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論